1OM-1064-002.pdf - 第73页
Recogniti on Method Applicable Component Size Imag e Scanning Method Lighting to be Used Small View Larg e View Maximum View Front Lig hting 1.0 × 0.5 to 23 × 15 mm 2.0 × 1.2 to 46 × 34 mm 2.0 × 1.2 to 46 × 46 mm Batch B…
9910-001 1-42 Tg0246-PM-OP
6. Outline of System Operation
(2) Front Lighting Recognition System
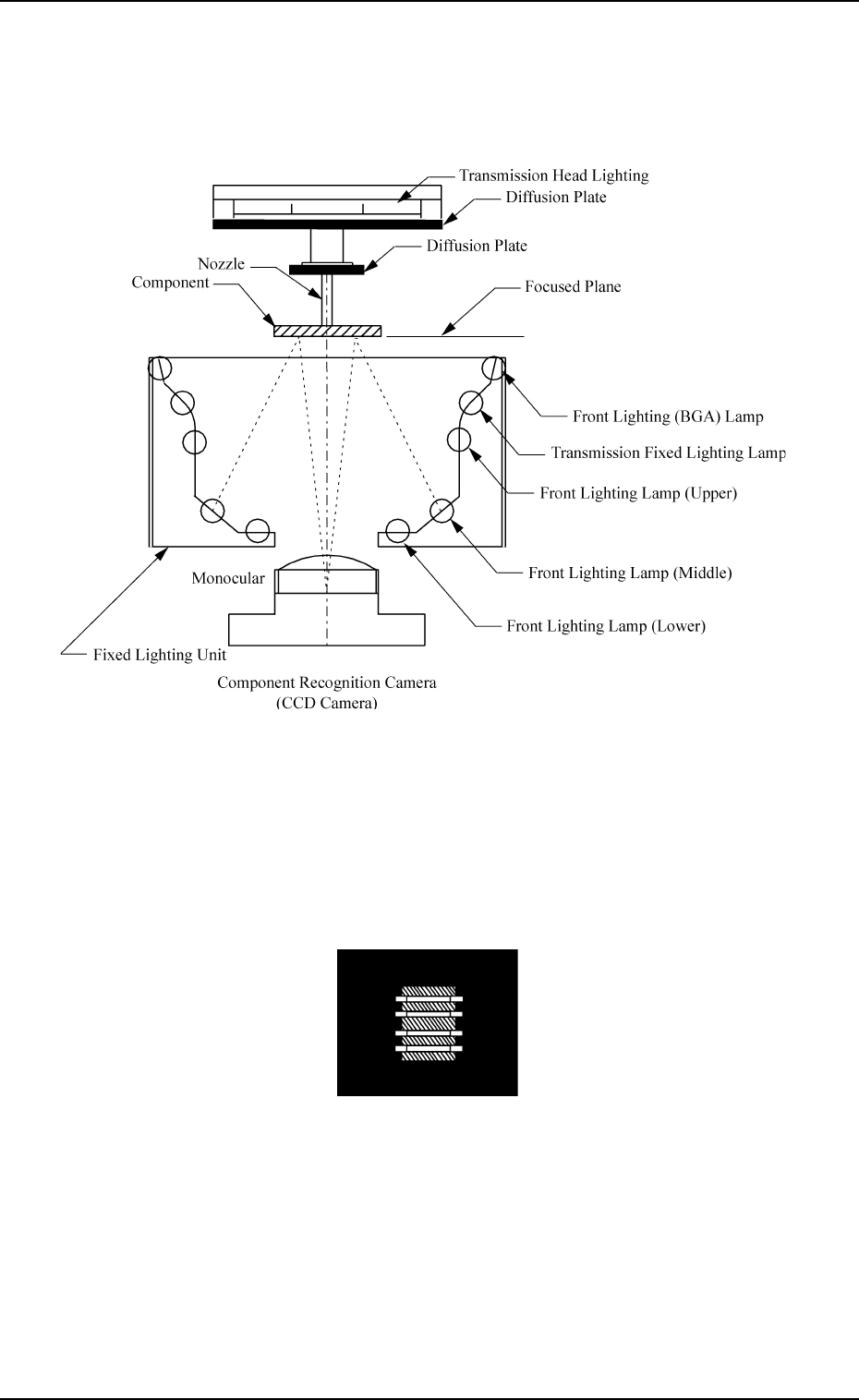
Fig. 1.18 shows the sectional view of the recognition unit and the flow of
the recognition light in the front lighting recognition system. Select the
proper lighting system, using the front lighting lamps (upper, middle, and
lower) for component recognition.
Fig. 1.18
The light emitted from the front lighting lamps (upper, middle, and lower)
meets the bottom of the component.
The reflected light enters into the CCD camera through the monocular.
That is, the CCD camera captures the image of the component leads, etc.
Fig. 1.19 Image (Example) on Recognition Monitor
Recognition Method
Applicable Component Size
Image Scanning
Method
Lighting to be
Used
Small View Large View Maximum View
Front Lighting
1.0 × 0.5 to
23 × 15 mm
2.0 × 1.2 to
46 × 34 mm
2.0 × 1.2 to
46 × 46 mm
Batch
Back Lighting
1.0 × 0.5 to
23 × 15 mm
2.0 × 1.2 to
36 × 35 mm
2.0 × 1.2 to
36 × 36 mm
Divided Front Lighting
Max. 55 × 55 mm Max. 55 × 55 mm
Note
Max. 55 × 55 mm
Note
6. Outline of System Operation
9910-001 1-43 Tg0246-PM-OP
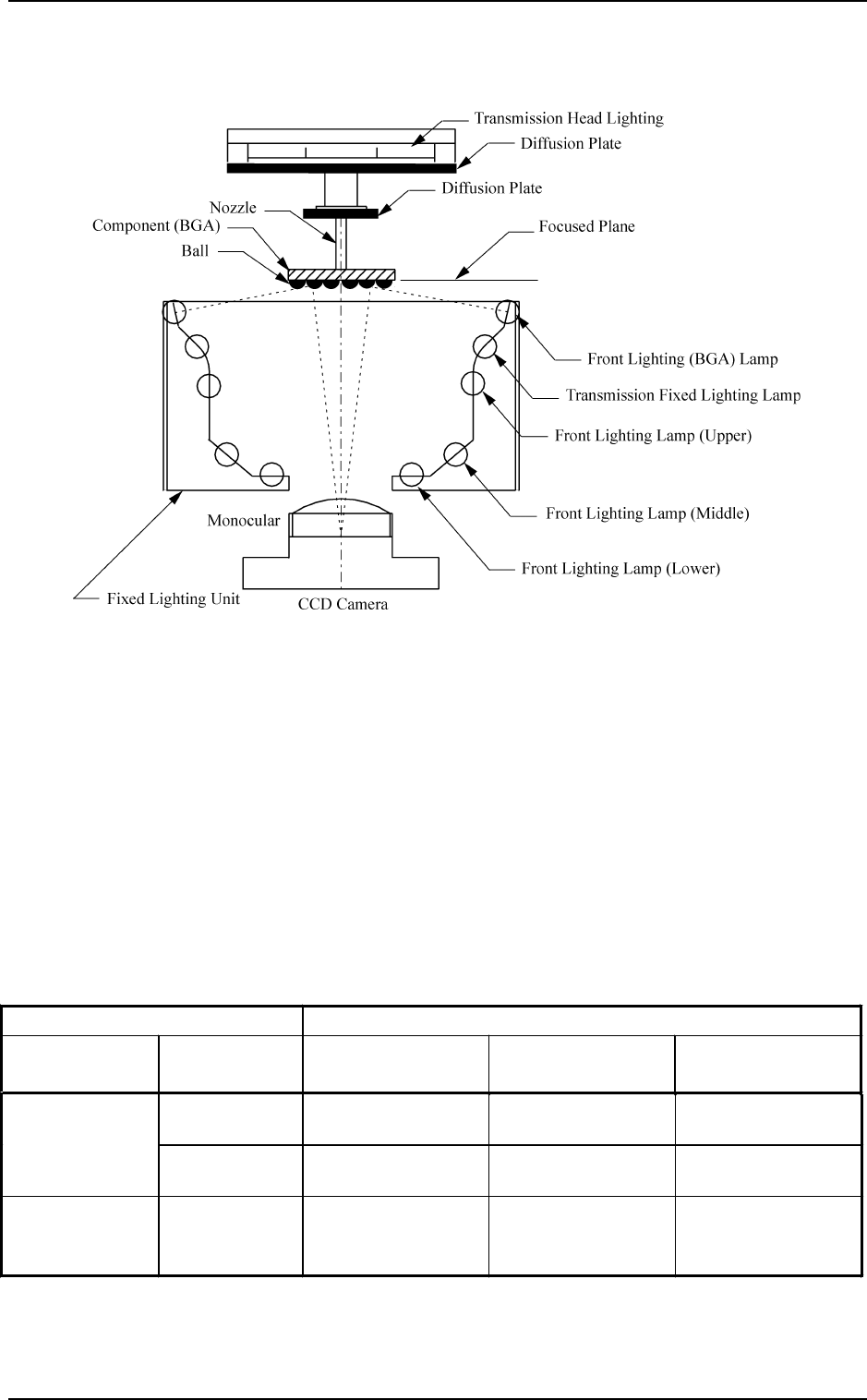
(3) Front Lighting (BGA) System
Fig. 1.20 shows the sectional view of the recognition unit and the flow of
the recognition light in the front lighting (BGA) system.
Fig. 1.20
The light emitted from the front lighting for BGA meets the balls, etc., on the
bottom of the BGA component. The reflected light enters into the CCD cam-
era through the monocular. The captured images look like doughnuts. That is,
the CCD camera can be used to detect where the BGA balls are located or
whether or not the balls exist.
Supplement:
• One of the three fields of view can be selected for the component recogni-
tion camera.
Two cameras are installed on each beam. (4 cameras in total)
As a standard combination of cameras, four large view cameras are recom-
mended.
Note: In the case of the connector, this recognition can be applied to Max.
150 × 26 mm.
Table 1.5
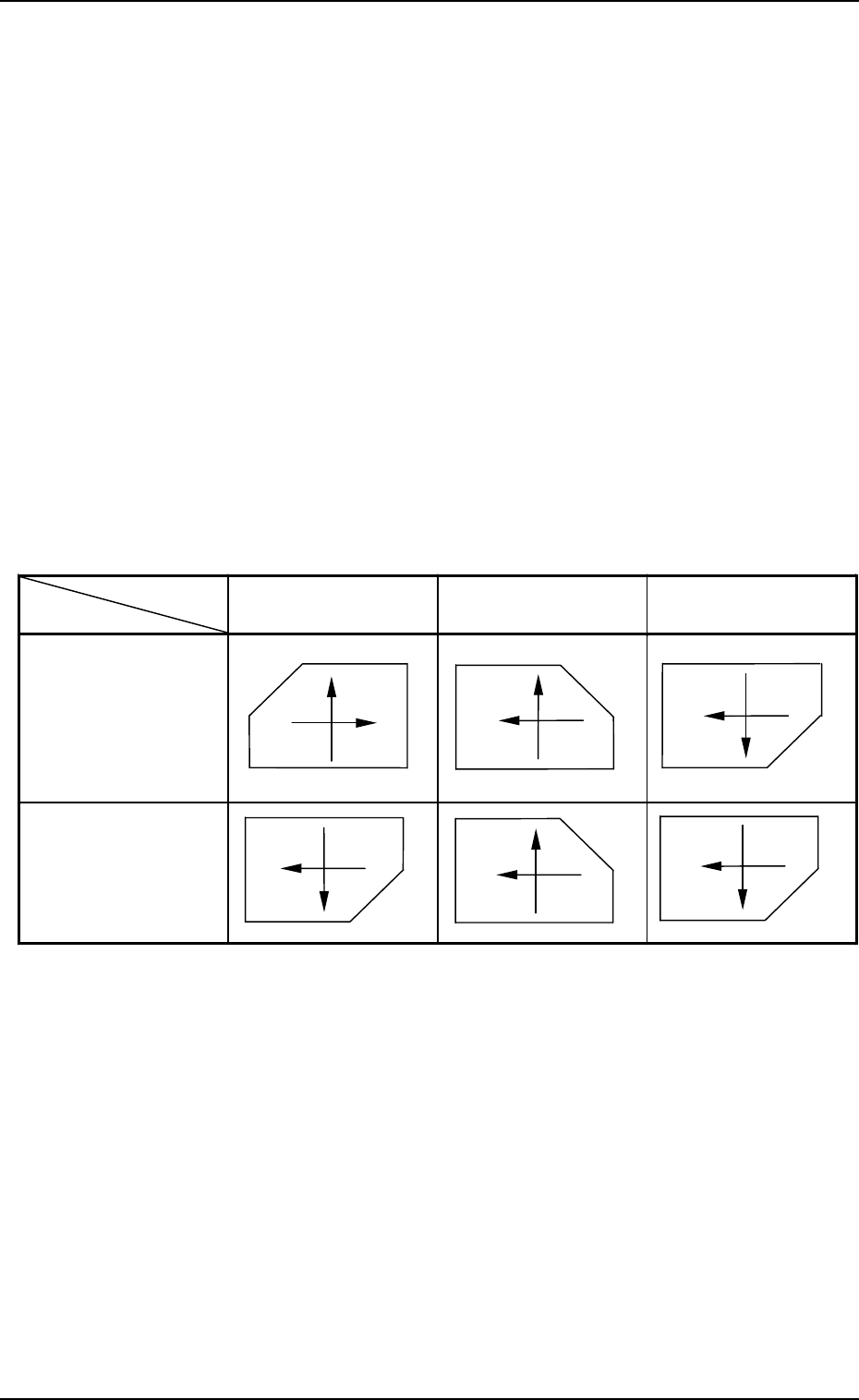
Picked Component
Captured Image on
Recognition Monitor
Placed Component
View from Front Side
of Machine
View from Rear Side
of Machine
3
2
41
2
3
1
4
1
4
2
3
1
4
23
2
3
1
4
1
4
2
3
• The recognition system (back lighting, front lighting, or front lighting (BGA)
system) can automatically be selected according to the component library
data.
• Component Recognition Coordinates System
The image of the component (state of picked component based on the X/Y
beam movement) on the recognition monitor looks like those depicted be-
low.
View from Front Side of Machine:
The captured image of the picked component on the recognition
monitor is inverted horizontally, compared with the posture of the
picked component. Therefore, when the X/Y beam moves from left
to right, the image of the component moves from right to left on the
recognition monitor.
View from Rear Side of Machine:
The image of the component on the recognition monitor is inverted
vertically, compared with the posture of the picked component. There-
fore, when the X/Y beam advances from up (front side of machine)
to down (rear side of machine), the image of the component on the
recognition monitor moves up.
6. Outline of System Operation
9910-001 1-44 Tg0246-PM-OP
Table 1.6