YSD_Users_K.pdf - 第204页
5-16 5 4. 2 탑 재 파라미터 탑 재 파 라 미 터 에 서 는 , 탑 재 위 치 와 탑 재 할 부품 번 호 등 , 탑 재 에 관 한 데 이 터 를 설 정 합 니 다 . 탑 재 파 라 미 터 는 , 디 스 펜 스 데 이 터 를 자동 생 성 하 기 위 해 사 용 합 니 다 . c 주의 마운 터 로 부터 데 이 터 를 복사했 을 경 우 , 디 스펜 스 의 대 상 이 아닌 탑재 데 이터 는 …
5-15
5
I: 예정 언로더 수량
언로더의 1 랙에 수납가능한 수량을 지정합니다 . 설정수량의 생산이 끝나면 언로더가 랙을 교환할 때까지 생산기판의 반
출을 중단합니다 . 「0」을 입력한 경우 , 기판수량이 언로더의 최대용량이 되어도 연속해서 생산을 합니다 . 다음 조건을 만
족하는 경우는「0」을 입력하여 주십시오 .
•
랙 교체신호를 내는 언로더를 사용하고 있다 .
•
리플로우 직전의 장비에서 이 데이터를 사용한다 .
J: 기판고정방법
「외형기준」을 선택합니다 . 푸쉬업과 연동하여 기판을 끼워서 고정합니다 .
K: 고정 시작 타이머
기판이 메인스톱퍼의 앞에 위치한 기판검출센서 위를 통과한 직후에 장비는 기판고정 동작을 시작합니다 . 기판사이즈와
컨베이어 속도에 따라서 , 고정을 시작하는 최적 타이밍이 다릅니다 . 이 파라미터에 의해 고정을 시작하는 타이밍을 늦출
수 있습니다 . 0.0
~
1.9 초의 수치를 입력하여 주십시오 .
L: 반송시작 높이
실장 종료후 , 컨베이어 출구로의 기판반송은 푸쉬업 유니트 하강후에 시작됩니다 . 이미 기판뒷면에 부품이 장착되어 있는
경우는 , 푸쉬업 유니트가 충분히 하강하지 않으면 부품과 유니트가 간섭할 위험이 있습니다 . 이 파라미터에 의해 기판종
류별로 푸쉬업 유니트의 하강 높이를 지정할 수 있습니다 . 기판 고정시의 푸쉬업 유니트의 높이를 0mm 로 하고 , 거기서
부터 몇 mm 하강시킬지를 5
~
50mm 의 수치로 입력하여 주십시오 .
M: 컨베이어 공회전 타이머 ( 초 )
생산기판의 형상이 일반이면「0 초」로 설정합니다 .
생산기판이 특수한 형상 (Notch, 중앙홀 등 ) 이기 때문에 , 컨베이어 출구센서가 기판반출을 잘못 인식하는 경우가 있습니
다 . 이럴 경우 , 컨베이어 공회전 타이머를 설정하면 , 기판검출 센서가 OFF 된 후에도 컨베이어를 타이머분 만큼 회전시
켜서 기판반출을 완료할 수 있습니다 . 0.0~9.9 초의 수치를 입력하여 주십시오 .
N: 화상처리보정 ( 본 장비에서는 미사용 )
O: 부압 확인 ( 본 장비에서는 미사용 )
P: 재시도 방식 ( 본 장비에서는 미사용 )
Q: 부품 선취
일반적으로「한다」로 설정합니다 .
S: 디스펜스 체크
프리 디스펜스를 실행할 경우 ,「한다」로 설정합니다 .
도포된 도트를 화상인식하고 , 디스펜스 용액소진 , 노즐 막힘 , 꼬리발생 등의 체크를 미리 프리 디스펜스 데이터에서 지정
한 마크번호에 따라 실행합니다 .
T: 자동 프리도팅
도트 스테이션상에 디스펜스를 프리 ( 테스트 ) 도팅합니다 .
설정방법에 관해서는 , 제 4 장「5.1.1 프리도팅 기능의 설정」을 참조해 주십시오 .
X: 컨베이어모터 속도 (%)
컨베이어 모터 ( 기판반송 ) 속도를 설정합니다 . 장비설정에 설정되어 있는 데이터를 표준으로 하여 + 측으로 50%, - 측으
로 90% 까지 10% 단위로 설정할 수 있습니다 .
u: 컨베이어 반송방법
기판 (PCB) 데이터별로 , 컨베이어의 반송방법을 설정할 수 있습니다 .「장비설정」「일반」「고속」중에서 선택합니다 .
•
장비설정
장비설정 (Vmspec) 에서 미리 설정되어 있는 반송방법이 됩니다 .
•
일반
기판의 실장이 종료되면 기판고정이 해제되고 , 실장완료 기판을 다음 스테이지 또는 하류측 장비로 반송하는 동작을
시작합니다 . 그 기판을 컨베이어상의 WorkOut 센서가 검지하고 통과한 시점에서 대기위치의 기판을 실장위치로
반송합니다 .
•
고속
기판의 실장이 종료하면 기판고정이 해제되고 , 실장완료 기판을 출구로 반송하는 동작을 시시작합니다 . 그 기판을
컨베이어상의 WorkOut 센서가 검지함과 동시에 , 대기위치의 기판을 실장위치에 반송합니다 . 이때 , 실장완료 기판이
WorkOut 센서를 통과한 시점에서 메인 스톱퍼가 상승합니다 .
5-16
5
4.2 탑재 파라미터
탑재 파라미터에서는 , 탑재위치와 탑재할 부품번호 등, 탑재에 관한 데이터를 설정합니다.
탑재 파라미터는 , 디스펜스 데이터를 자동생성하기 위해 사용합니다.
c
주의
마운터로부터 데이터를 복사했을 경우 , 디스펜스의 대상이 아닌 탑재 데이터는 삭제해 주십시오 .
1
32 4 5 87 9 10
11
6
탑재 파라미터 화면
68510-N7- 00
1. 실행 / 스킵
기판으로의 부품탑재를 실행할 지의 설정이 표시됩니다 . 변경할 때는 , [ 편집 ] 버튼을 눌러 주십시오 .「스킵」으로 설정하
면 패스운전을 합니다 .
2. 패턴명칭
기판상에 프린트된 회로명칭 ( 예 :R23, U12 등 ) 을 입력합니다 .
3. 스킵
이 탑재데이터를 실행하지 않을 경우는 , 체크합니다 .
4. X, Y
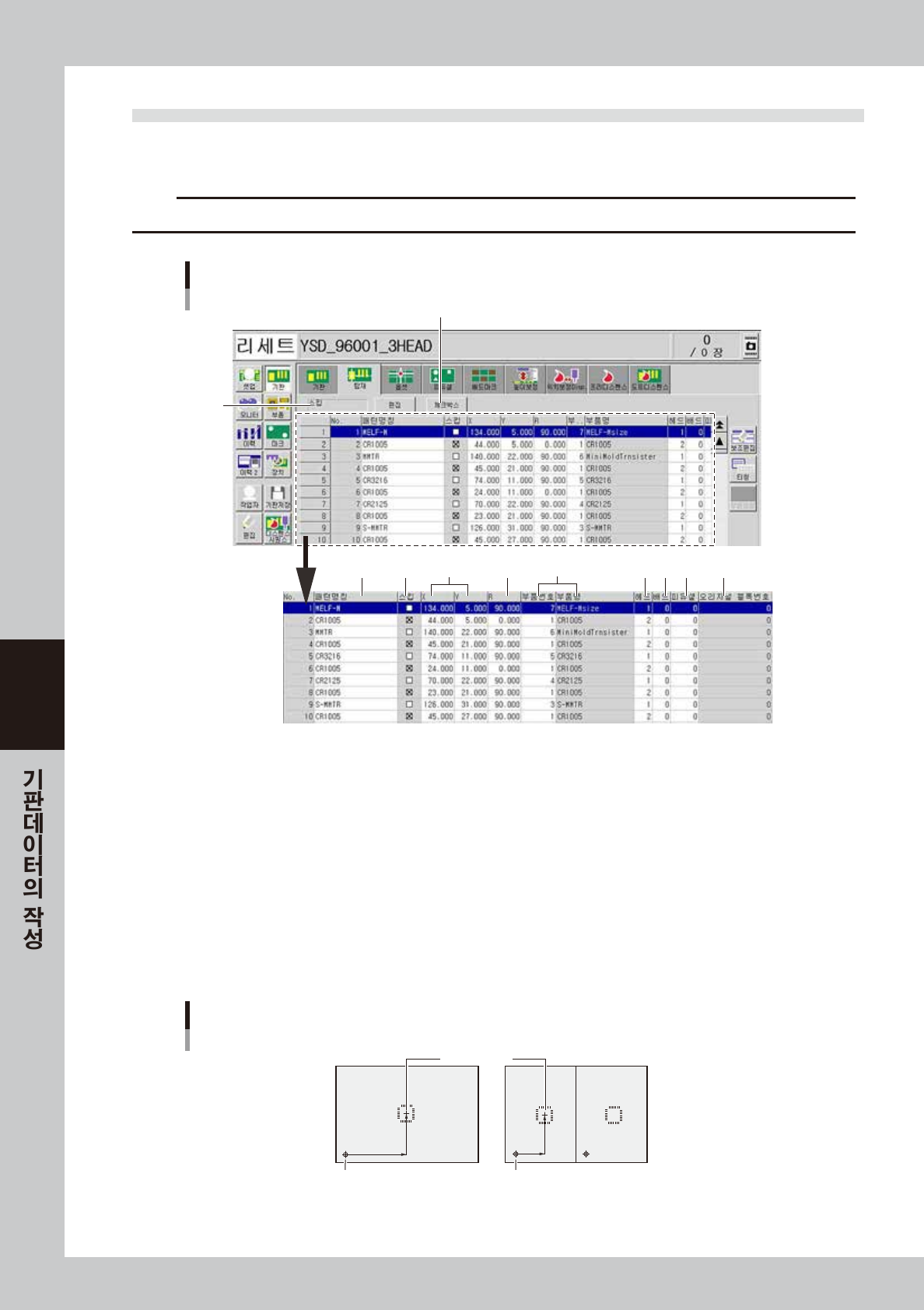
1 장의 기판일 경우는 기판원점부터 , 분할기판의 경우는 기준블록부터 탑재중심 위치까지의 좌표데이터를 입력합니다 .
티칭입력할 경우는 아래 그림을 참고하여 주십시오 .
탑재중심 위치
기판원점과 탑재중심 위치
기판원점 블록 리피트 No.1
제1블록 제2블록
67505-N7-00
5-17
5
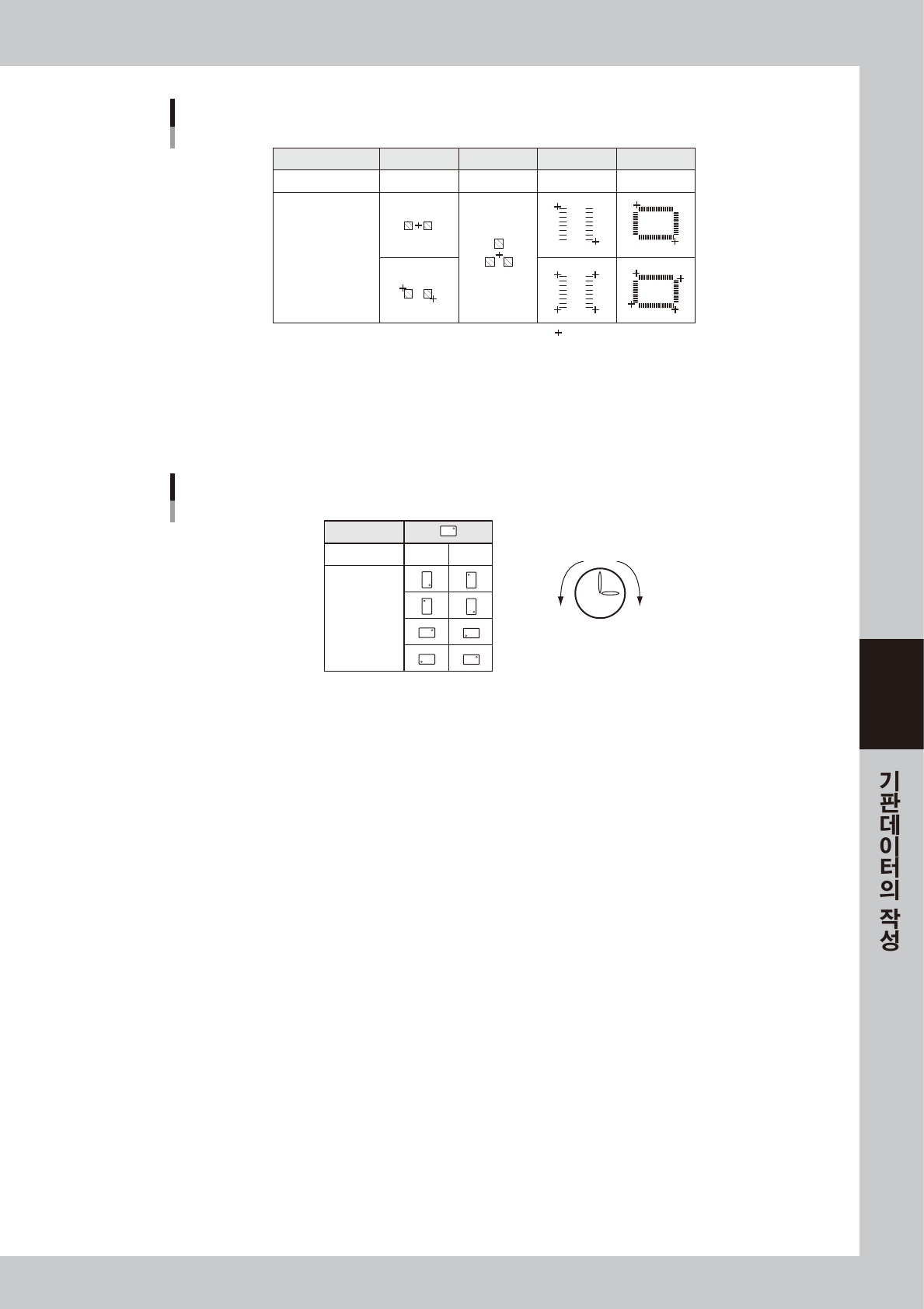
부품종류
티칭방법
티칭위치
부품별 티칭방법
칩
1점이나 2점
트랜지스터
1점
SOP
2점이나 4점
QFP
2점이나 4점
:티칭포인트
67506-N7-00
5. R 데이터
부품탑재 각도를 입력합니다 . 흡착각도 ( 부품파라미터 ) 가 0°일 경우는 , 부품 포장외형에서 회전각도를 입력합니다 . 흡
착각도가 90° 또는 -90°인 경우는 다음 표를 참조하여 주십시오 . 위에서 봐서 시계반대 방향을 플러스 , 시계방향을 마
이너스로 합니다 .
부품 포장외형
흡착각도 90° -90°
탑재각도 0°
180°
90°
-90°
시계
플러스 마이너스
탑재각도
67507-N7- 0 0
6. 부품번호 , 부품명
탑재할 부품의 부품번호 ( 부품정보 데이터 No.) 를 입력합니다 . 부품번호에 따라 부품명은 자동적으로 입력됩니다 .
7. 헤 드
탑재에 사용할 헤드번호를 입력해 주십시오 .
8. 배드 ( 배드마크 )
이 탑재데이터에 대하여 사용할 로컬 배드마크의 번호를 입력합니다 . 단 , 로컬배드가 설정되어 있는 경우만 유효합니다 .
이 기능을 사용하지 않을 경우는「0」을 입력하여 주십시오 .
9. 피듀셜
이 탑재데이터에 대하여 사용할 포인트 / 로컬 /4 점 피듀셜 번호를 입력합니다 .
단 , 로컬피듀셜이 설정되어 있는 경우만 유효합니다 . 이 기능을 사용하지 않을 경우는「0」을 입력하여 주십시오 .
10. 오리지널 블록번호
블록전개 ( 참고데이터 있음 ) 를 실행했을 때에 , 전개된 블록별로 자동으로 할당되는 블록번호를 표시합니다 .
블록전개 ( 참고데이터 있음 ) 에 대해서는 , 제 7 장「2.2.1 블록옵셋의 전개」를 참고해 주십시오 .
11. [ 체크박스 ] 버튼
스킵의 체크박스를 편집가능하게 하는 버튼입니다 . 일반적으로 , 스킵의 항목은 비활성화 되어 있지만 [ 체크박스 ] 버튼을
클릭함으로서 편집이 가능하게 됩니다 .