SI-G200MK3_操作说明.pdf - 第177页
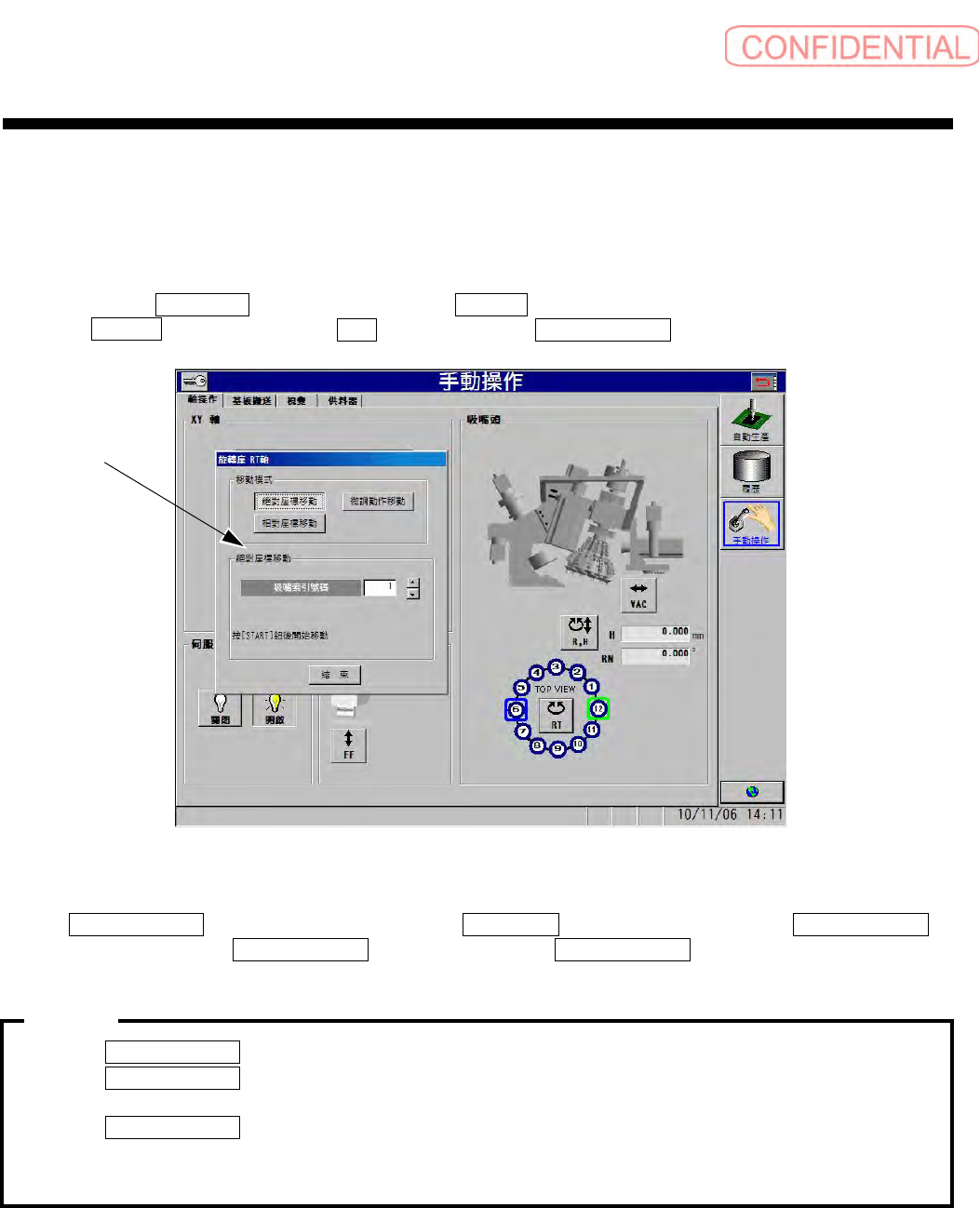
电子零件装着机 SI-G20 0Mk3 (CS) 4-9 操作篇 4. 手动操作 4.1.3 吸嘴座 RT 轴的操作 (旋转式吸嘴头) [ 概要 ] 旋转安装 12 支零件装着用吸嘴的吸嘴头。 [ 操作顺 序 ] 依顺序点击 手動操作 ( 手动操作 ) 菜单 → 軸操作 ( 轴操作 ) 标签。 点击 吸嘴頭 ( 吸嘴头 ) 的下方 RT 钮,会表示以下 旋轉座 RT 軸 ( 旋转座 RT 轴 ) 对话框 1 。 图 4.1.3-1 手動…
操作篇
4. 手动操作
4-8
电子零件装着机
SI-G200Mk3 (CS)
(3)
微調動作移動 ( 微调动作移动 )
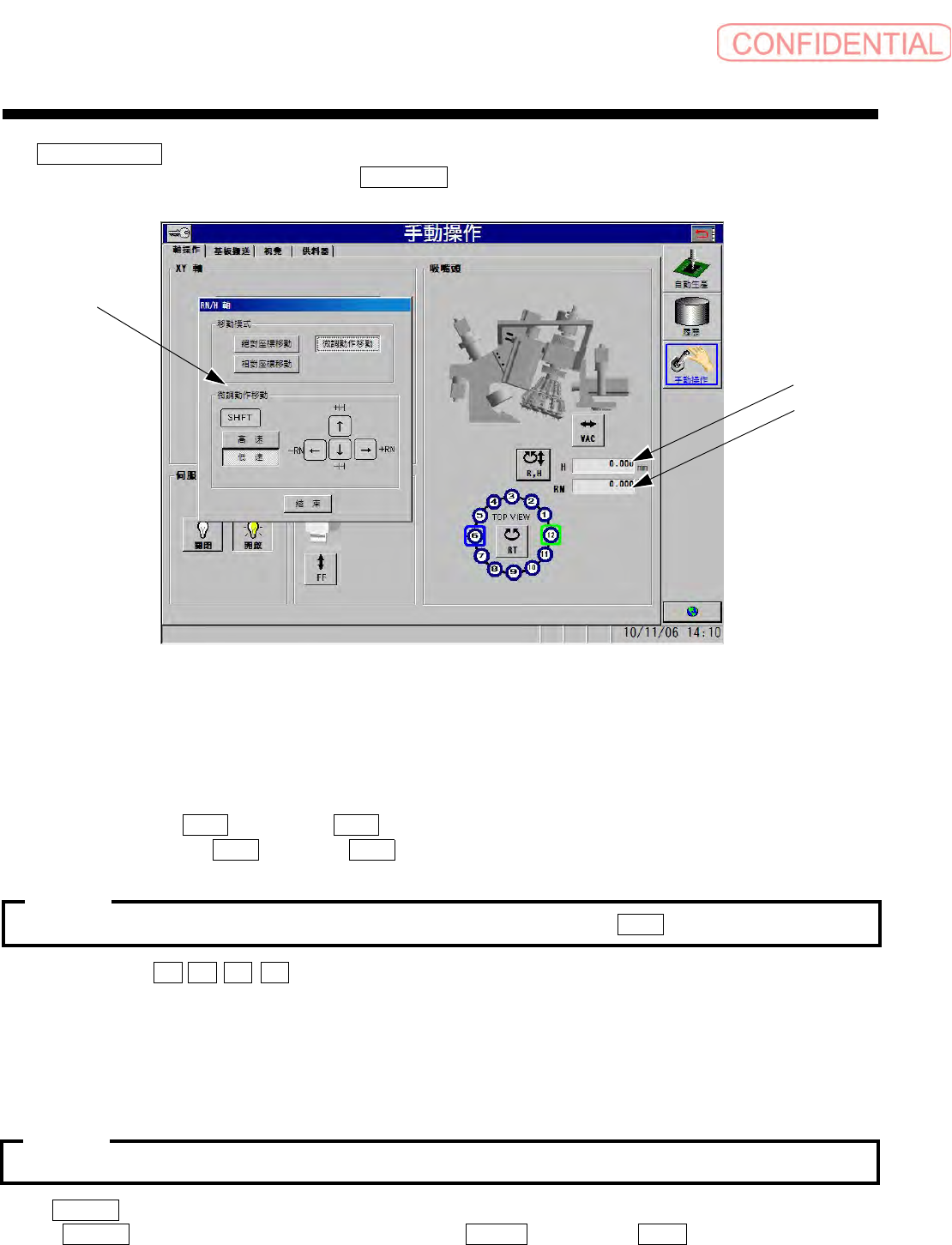
指定微调动作移动时,会出现以下的 RN/H 軸 (RN/H 轴 ) 对话框 1。
图
4.1.2-2
手動操作- 軸操作
(
手动操作- 轴操作
)
画面
吸嘴 RN 轴及 H 轴微调移动的顺序如下。
[1] 指定移动速度。
以下方法可指定移动速度。
方法:点击
高速 ( 高速 ) 或 低速 ( 低速 ) 钮。
→ 指定 高速 ( 高速 ) / 低速 ( 低速 ) 的切换。
前门或后门任一门打开,或互锁开关关闭时,为了安全,无法选择
高速
(
高速
)
。
[2] 按游标 ( ← → ↓ ↑ ) 键。
→
往按下的游标方向移动指定轴。有时按游标键其轴未有反应,此时请改变按键时机即可
操作。
提示
按游标立即放开时,移动
1 个指针 ( 寸移动 ) 。
连续按游标时,其指定轴连续移动。
吸嘴
RN
轴及
H
轴无法同时移动。
[ 軸操作 ( 轴操作 ) 画面说明 ]
在 吸嘴頭 ( 吸嘴头 ) 图中的文本框 23 中表示 RN 軸 (RN 轴 ) 及 H 軸 (H 轴 ) 的现在位置。
此文本框无法直接输入数值。
角度的单位为
deg,距离的单位为 mm。
注意 :
注意 :
2
1
3
电子零件装着机 SI-G200Mk3 (CS)
4-9
操作篇
4. 手动操作
4.1.3 吸嘴座 RT 轴的操作 (旋转式吸嘴头)
[ 概要 ]
旋转安装 12 支零件装着用吸嘴的吸嘴头。
[ 操作顺序 ]
依顺序点击 手動操作 ( 手动操作 ) 菜单 → 軸操作 ( 轴操作 ) 标签。
点击
吸嘴頭 ( 吸嘴头 ) 的下方 RT 钮,会表示以下 旋轉座 RT 軸 ( 旋转座 RT 轴 ) 对话框 1。
图
4.1.3-1
手動操作- 軸操作
(
手动操作- 轴操作
)
画面
由 旋轉座 RT 軸 ( 旋转座 RT 轴 ) 对话框的 移動模式 ( 移动模式 ) 框中,点击 絕對座標移動
(
绝对坐标移动 ) 、 相對座標移動 ( 相对坐标移动 ) 、 微調動作移動 ( 微调动作移动 ) 任一希望
的钮。
·所谓
絕對座標移動
(
绝对坐标移动
)
为索引指定吸嘴至吸着、装着位置。无关现在的吸嘴。
·所谓
相對座標移動
(
相对坐标移动
)
为以现在的吸嘴号码为起点,仅旋转指定的增分值。相
同增分值
,
若改变现在的吸嘴号码,到达的吸嘴也不同。
·所谓
微調動作移動
(
微调动作移动
)
为按一次钮,仅旋转一个号码。若连续钮时,则会连续
转动。
·
RT
轴由上面看时,顺时针旋转为正
(+)
方向。
注意 :
1
操作篇
4. 手动操作
4-10
电子零件装着机
SI-G200Mk3 (CS)
(1)
絕對座標移動 ( 绝对坐标移动 )
依各个调整钮 ▲ ▼ ,选择目标的吸嘴号码。
按操作面板的
START 钮后,转动指定的吸嘴至吸着、装着位置。
移动中
,
按面板的
STOP
钮时,会停止在指针位置。再度按
START
钮时,会继续转动至吸
着·装着位置。
(2) 相對座標移動 ( 相对坐标移动 )
依调整钮 ▲ ▼ ,选择指针的增分值。通过相对移动,可设定 -6~6 之间的值。
按操作面板的
START 钮,旋转吸嘴至指定的增分值位置。
移动中
,
按面板的
STOP
钮时,会停止在指针位置
,
再度按
START
钮时,会继续转动至目
标位置。
[ 軸操作 ( 轴操作 ) 画面说明 ]
现在吸着、装着位置的吸嘴在 吸嘴頭 ( 吸嘴头 ) 图中为 綠色 ( 绿色 ) 框围着的号码。
绝对坐标移动时,
RT 軸 (RT 轴 ) 会选择顺时针方向为实际回转方向。
注意 :
注意 :