SI-G200MK3_操作说明.pdf - 第42页
系统概要篇 1. 系统操作 1-8 电子零件装着机 SI-G200Mk3 (CS) 1.2.3 装着吸嘴头的构成 吸嘴头由视觉认识相机和小型 旋转式吸嘴头构成。 下图显示的是装着吸嘴头的构 成。 吸嘴头 视觉认识相机部 零件认识相机 ( 参照 1.2.3.1) 吸着检查相机 基板认识相机 旋转式吸嘴头部 吸嘴 (12 支 ) ( 参照 1.2.3.2) 1.2.3.1 视觉认识相机部 视觉认识相机,根据其认识目 的,分为零件认识相机、吸…
系统概要篇
1. 系统操作
电子零件装着机
SI-G200Mk3 (CS)
1-7
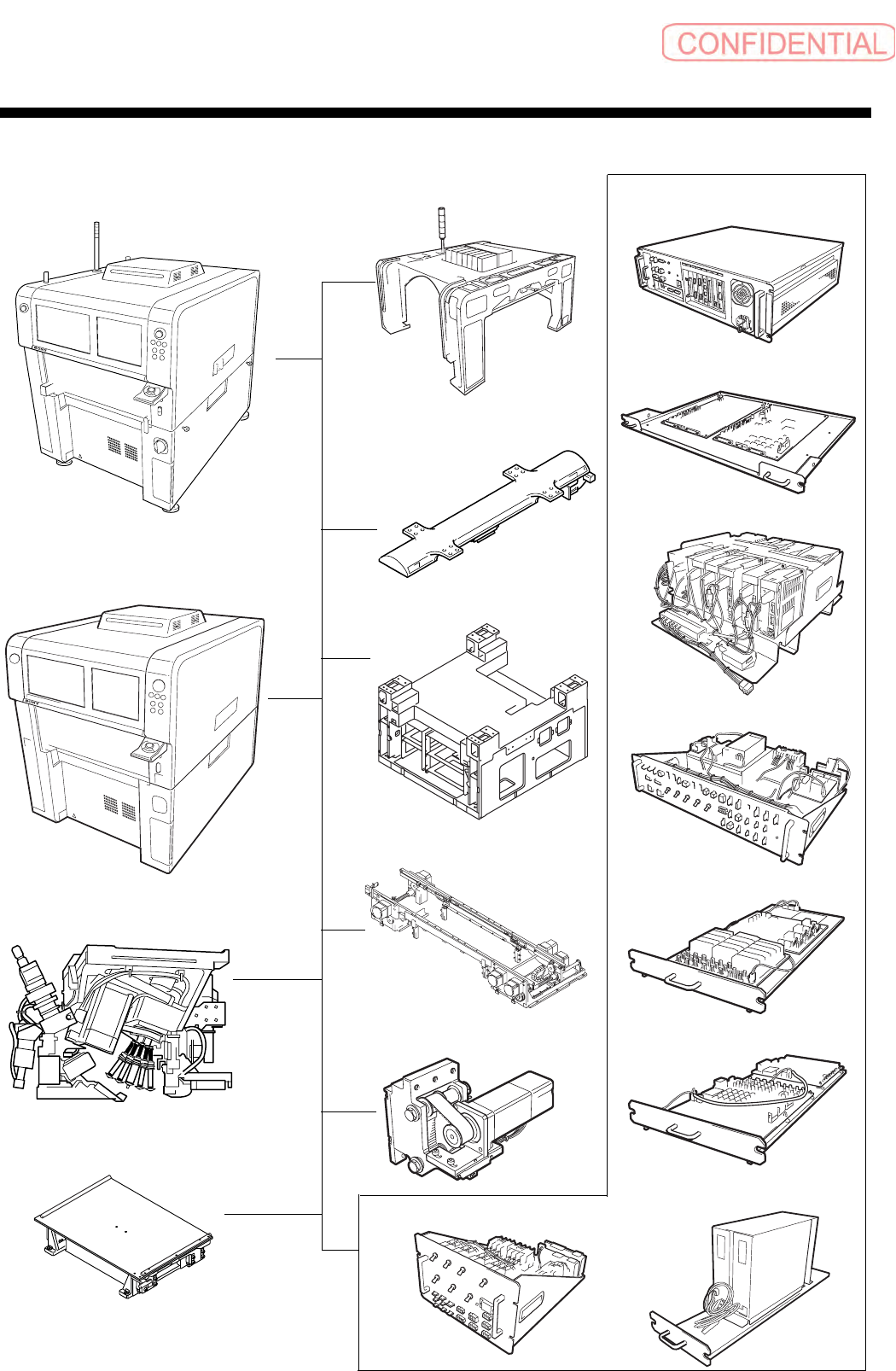
1.2.2 装置构成
SI-G200
盖子
高速吸嘴头装置
( 前面 / 后面 )
固定装置
X 轴装置 ( 前面 / 后面 )
架台装置
搬送装置
Battery 装置
I/O 装置 1
DRIVER
装置
SERVO 装置
PC 装置
SERVO I/F 装置
Feed 装置 ( 前面 / 后面 ) ( 选配 )
I/O 装置 2,3
POWER 装置
SI-G200
前面
Y 轴装置 ( 前面 / 后面 )
系统概要篇
1. 系统操作
1-8
电子零件装着机
SI-G200Mk3 (CS)
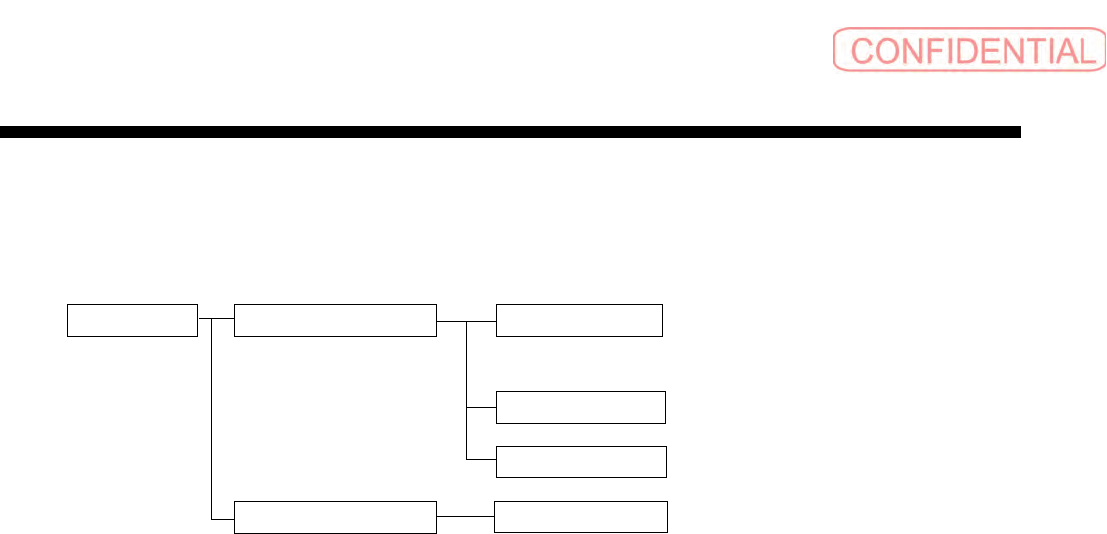
1.2.3 装着吸嘴头的构成
吸嘴头由视觉认识相机和小型旋转式吸嘴头构成。
下图显示的是装着吸嘴头的构成。
吸嘴头
视觉认识相机部 零件认识相机
( 参照 1.2.3.1)
吸着检查相机
基板认识相机
旋转式吸嘴头部 吸嘴 (12 支 )
(
参照 1.2.3.2)
1.2.3.1 视觉认识相机部
视觉认识相机,根据其认识目的,分为零件认识相机、吸着检查相机·基板认识相机。
·零件认识相机
为了正确贴装,用来确认吸着零件的相机。分为移动相机
( 标准装备 ) 和固定相机 ( 选配 )2
种。移动相机 XY 方向移动的装着头部,此相机是否进行零件装贴同时进行零件认识。固定相
机与移动相机相比具有更广阔的视角,能够认识移动相机视角内收不下的更大型号的零件。
·吸着检查相机
吸着零件时,为了检查吸着状态,从侧面认识零件检查高度的相机能够立即检查吸着。采用透射
照明。
·基板认识相机
是用来认识对基板姿势能进行补正、确定零件装着位置的定位点标记的相机。采用反射照明。
系统概要篇
1. 系统操作
电子零件装着机
SI-G200Mk3 (CS)
1-9
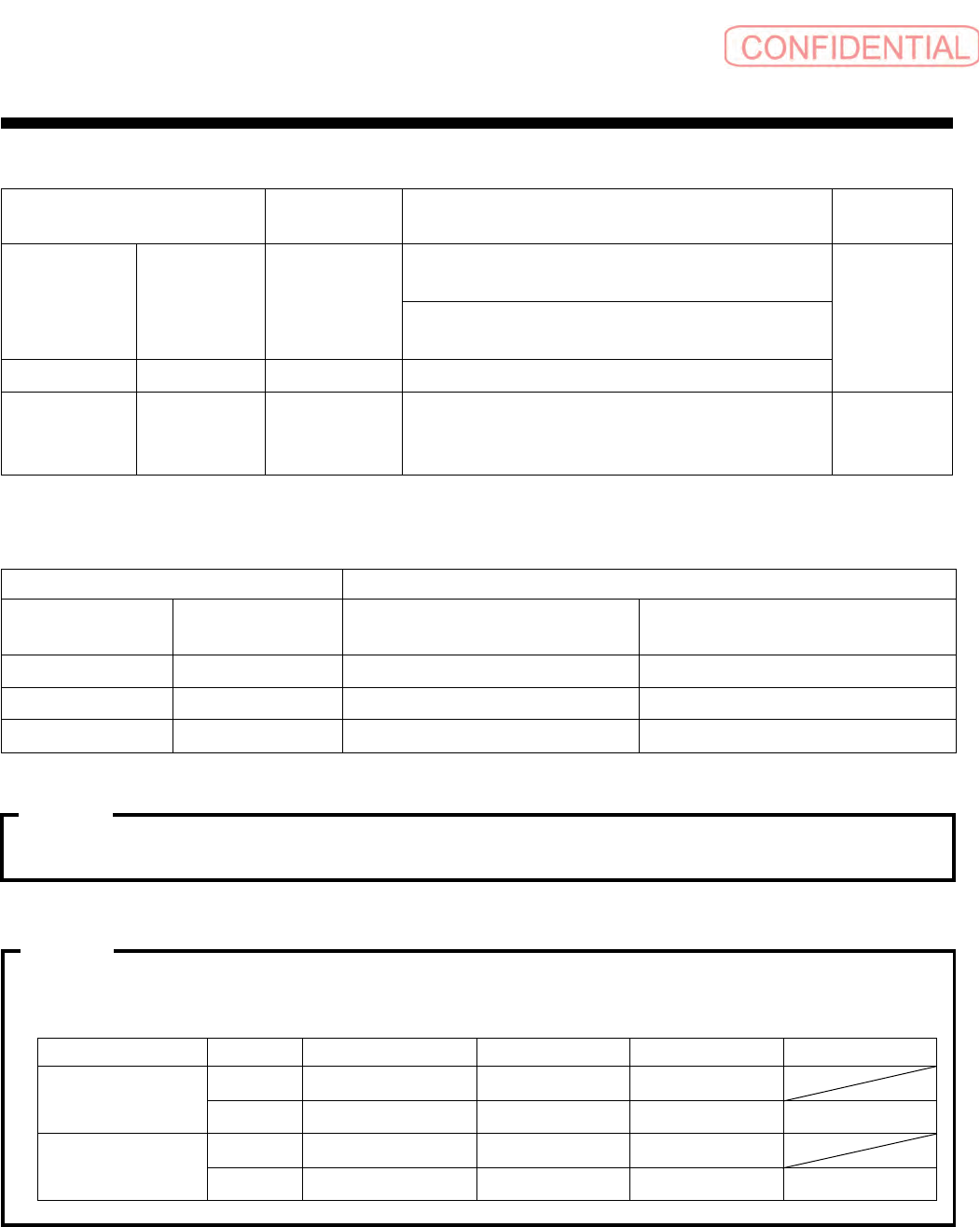
对零件视觉认识的相机、照明方式和零件之间有下表所示的限制条件。
SI-G200Mk3 有 4 种零件认识方式。各种认识方式和认识对象的零件的关系如下表。
·连接器作为基本的脚零件可以被认识,但是仍有一部分无法被认识。
·反射认识,也有由于光照方向而不能被认识的情况。
关于脚、
BGA
、
CSP
认识,由于脚锡球条件、背面条件,也有不能认识的情况。而且,各品
种数值的限制如下。
相机种类
照明方式
( 影像处理 )
认识零件条件
移动相机 认识零件 反射照明
0603 以上~□ 9.5mm 以下
*厚度
6mm 以下 ( 无角度限制 )
标准规格
□ 12mm 以下
*厚度
6mm 以下 ( 角度制限 10°以内 )
吸着检查 透射照明 零件厚度 0.3mm ~ 6mm
固定相机
(仅单输送带)
认识零件 反射照明
□ 6mm ~□ 25mm
*厚度 1mm 以上 6mm 以下 ( 无吸嘴构成
限制
)
选配规格
认识方式 对象零件
芯片 反射
基本的轮廓上没有凹凸的四角
形零件
·矩形芯片零件
脚 反射 ( 基本上无脚数量限制 ) ·晶体管、二极管、 SOP、 QFP
异形小型 反射 外形不规则的零件 ·连接器等
BGA
反射
球状电极成格子状排列的零件 · BGA/CSP 零件
最小直径、宽度 最小间距 最小间隙 接地面长度
移动相机
锡球
φ
0.22
0.47 0.25
脚
0.15
0.40 0.25 0.22
固定相机
(单输送带选配)
锡球
φ
0.30
0.55 0.25
脚
0.25
0.55 0.30 0.30
注意 :
注意 :
单位 :mm