SI-G200MK3_操作说明.pdf - 第360页
零件认识数据制作篇 1 . 操作 1-38 电子零件装着机 SI-G200Mk3 (CS) 1.3.6.3 认识结果详细画面 认识结果详细画面是在认识结 果一览上点击详细显示的项 目而显示的。 发生认识错误时,显示内容、 错误的发生原因和处理方法 。 图 1.3.6.3 認識結果一覽 ( 认识结果一览 ) 画面 1.3.6.4 认识详细参数的设定画面 设定执行认识时必要数据。 图 1.3.6.4-1 認識詳細參數的設定 ( 认识详细参数…
零件认识数据制作篇
1. 操作
电子零件装着机 SI-G200Mk3 (CS)
1-37
旋轉結束角度 ( 旋转结束角度 ) :结束旋转角度。
旋轉刻度角度 ( 旋转刻度角度 ) :在 1 个步骤中移动的角度。当设定值为 0 度
时,进行一次认识。
由於認識錯誤中斷 ( 由于认识错误中断 ) :在认识中发生错误后,中断认识。
詳細參數的設定 ( 详细参数的设定 ) 的画面显示按钮 :显示详细参数画面。
認識結果一覽 ( 认识结果一览 ) :一览显示认识结果。
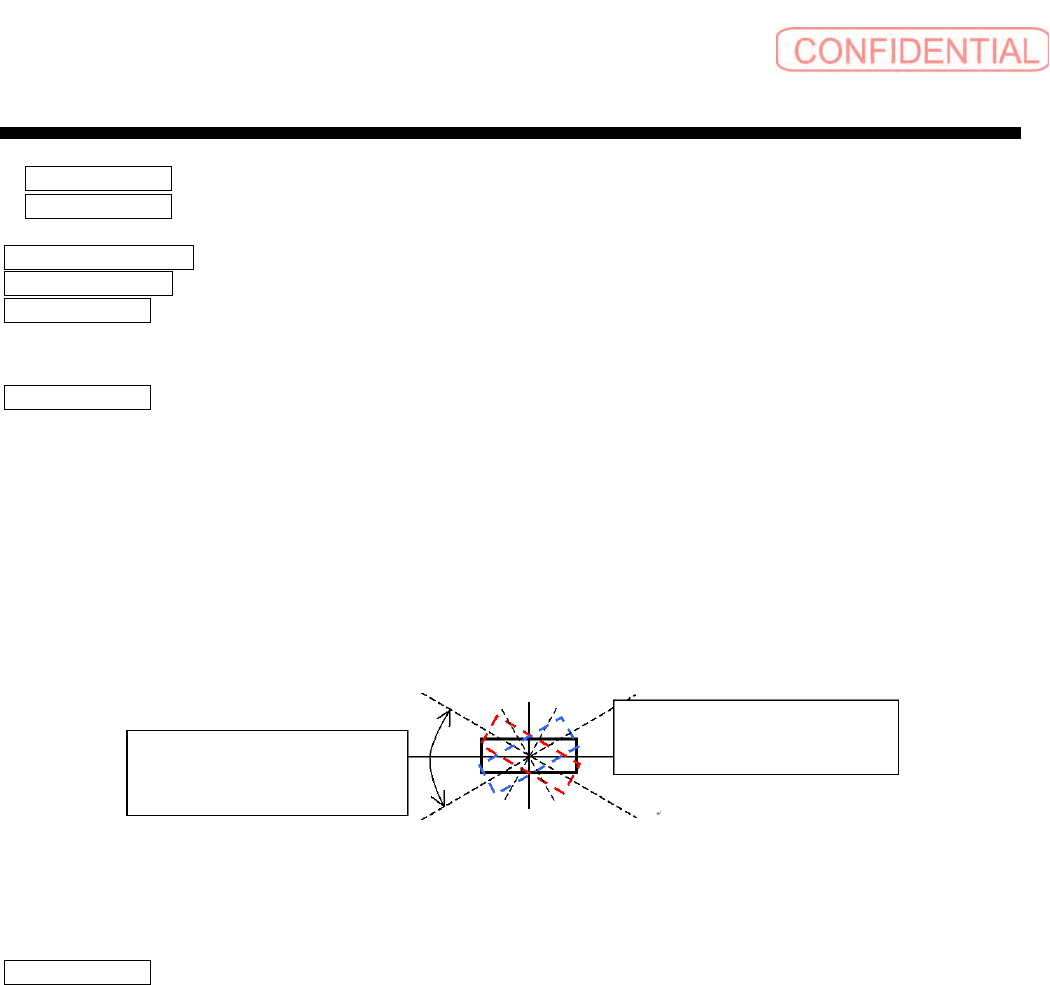
1.3.6.1 吸着偏离测试
吸著偏離測試 ( 吸着偏离测试 ) 就是为了确认在零件吸着时发生偏离时,可否进行稳定认识所做的
测试。
从旋转中心角度-旋转范围角度到旋转中心角度
+ 旋转范围角度的角度范围中更改每个旋转刻度角
度的同时进行认识测试。
测试是通过给零件模型的歪斜和实际零件的歪斜不同的值,进行认识。
零件模型的歪斜是在
" 旋转中心角度 " 固定,使实际零件以± " 旋转范围角度 " 旋转,旋转的刻度
宽度根据 " 旋转刻度角度 " 进行设定。
" 旋转刻度角度 " 是参数设定画面上设定的 " 角度偏离容许值 " 的最大值。
图
1.3.6.1
吸着偏离测试
1.3.6.2 零件旋转测试
零件旋轉測試 ( 零件旋转测试 ) 是确认在任意角度认识能够正确地进行测试。
从旋转开始角度到旋转结束角度的角度范围中更改每个旋转刻度角度的同时进行认识测试。
测试是通过给零件模型的歪斜和实际零件的歪斜相等的值,进行认识。
" 旋转范围角度 " 是将参数设定画面上设定的角度 " 偏离容许值 * 2" 作为最大值。
以
□
~
□
±旋转范围角度
移动实际零件
□
模型的角度
以旋转中心角度固定
零件认识数据制作篇
1. 操作
1-38
电子零件装着机
SI-G200Mk3 (CS)
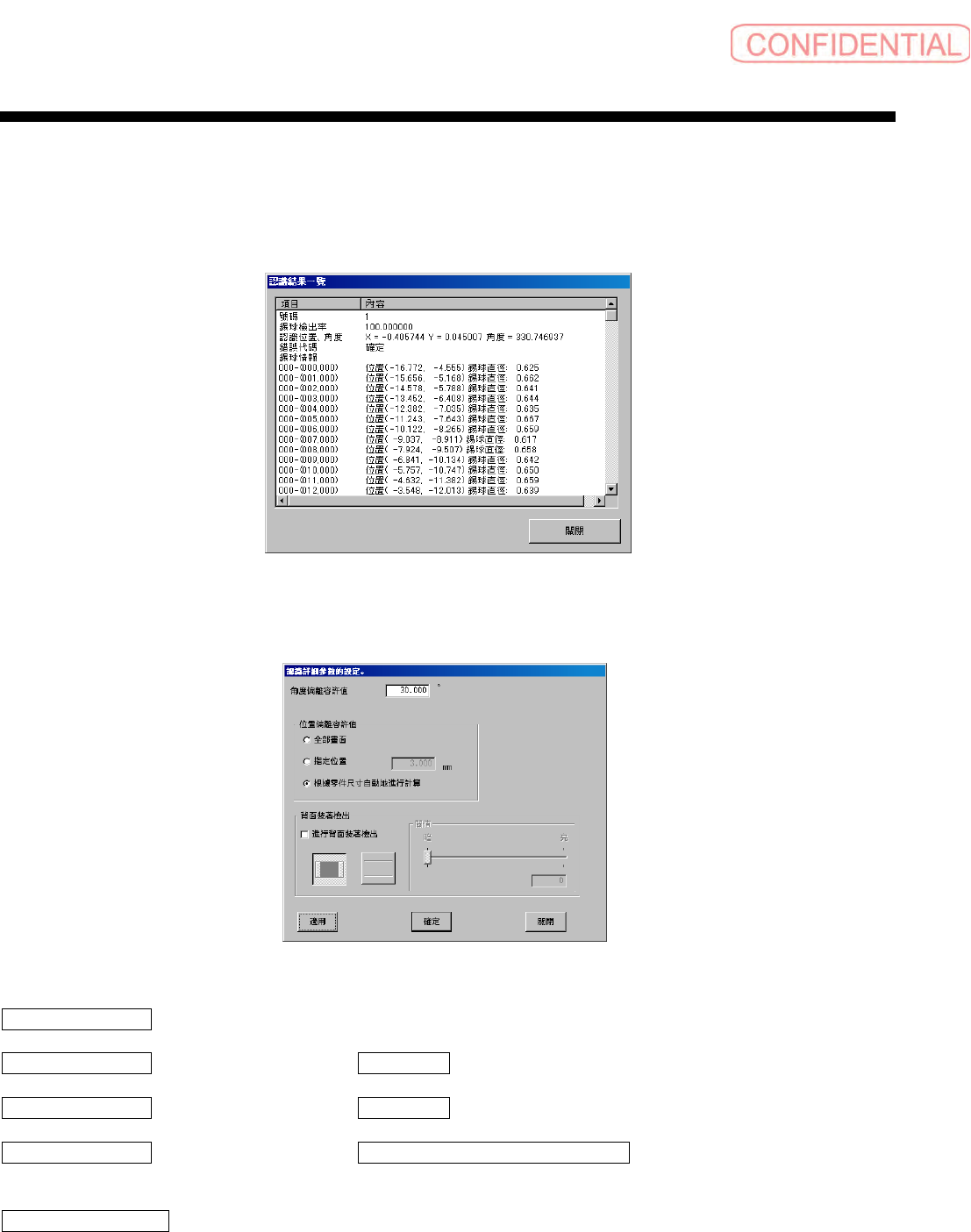
1.3.6.3
认识结果详细画面
认识结果详细画面是在认识结果一览上点击详细显示的项目而显示的。
发生认识错误时,显示内容、错误的发生原因和处理方法。
图
1.3.6.3
認識結果一覽
(
认识结果一览
)
画面
1.3.6.4 认识详细参数的设定画面
设定执行认识时必要数据。
图
1.3.6.4-1
認識詳細參數的設定
(
认识详细参数的设定
)
画面
(
芯片零件
)
角度偏離容許值 ( 角度偏离容许值 ) :
根据认识得到零件的角度,设定了与假想零件存在时的角度有偏离时的容许角度偏离量。
位置偏離容許值 ( 位置偏离容许值 ) - 全部畫面 ( 全部画面 ) :
零件认识时对全部画面进行认识。
位置偏離容許值 ( 位置偏离容许值 ) - 指定位置 ( 指定位置 ) :
零件认识时在指定领域内进行认识。
位置偏離容許值 ( 位置偏离容许值 ) - 根據零件尺寸自動地進行計算 ( 根据零件尺寸自动地进行计
算
) :
考虑零件认识时的角度、角度偏离容许值的值,自动设定认识领域进行认识。
進行背面裝著檢出 ( 进行背面装着检出 ) :
在进行背面装着检出的确认时,背面装着检出的项目变为有效,进行以从零件形状计算的窗口内
的亮度为基础的检出。由于窗口的大小是由电极的宽度自动计算的,请正确设定数值。
零件认识数据制作篇
1. 操作
电子零件装着机 SI-G200Mk3 (CS)
1-39
如果按下
,亮度比在 閾值 ( 阈值 ) 中设定的值小时,则认识 OK,亮度比在 閾值 ( 阈值 ) 中设定
的值大时,则判断为背面装着、出现错误。
如果按下
,亮度比在 閾值 ( 阈值 ) 中设定的值大时,则认识 OK,亮度比在 閾值 ( 阈值 ) 中设定
的值小时,则判断为背面装着、出现错误。
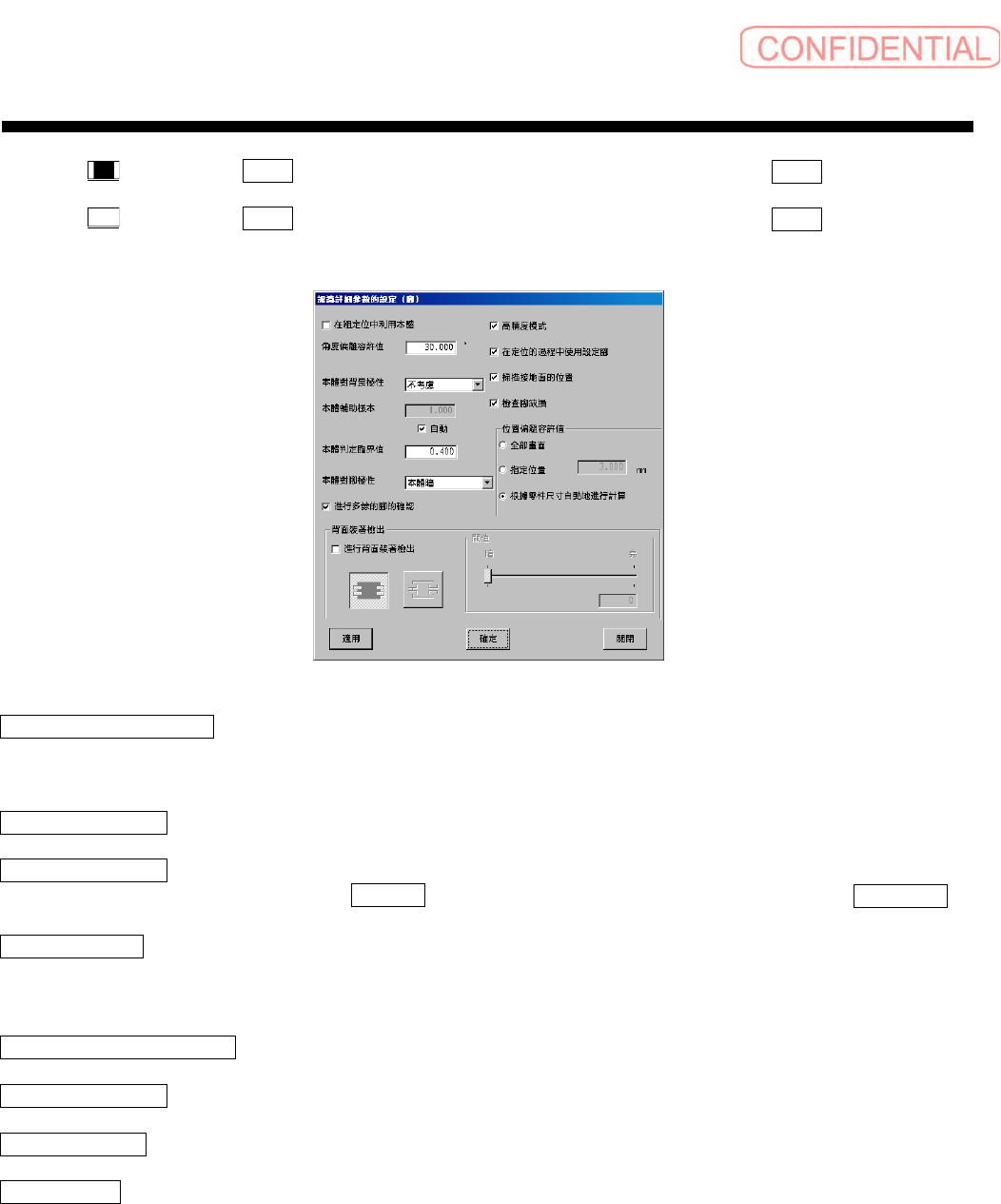
图
1.3.6.4-2
認識詳細參數的設定
(
认识详细参数的设定
)
画面 (脚零件·异形零件)
在粗定位中利用本體 ( 在粗定位中利用本体 ) :
设定计算零件大致位置时,是否使用本体的信息。当明确显现出本体时有效。当本体检出失败
时,自动转移到使用脚的定位处理。
没有脚的异形零件因为无法通过脚进行定位,一定要在粗定位时使用本体。
角度偏離容許值 ( 角度偏离容许值 ) :
根据认识得到零件的角度,设定了与假想零件存在时的角度有偏离时的容许角度偏离量。
本體對背景極性 ( 本体对背景极性 ) :
设定零件本体和背景的明暗差。
腳零件 ( 脚零件 ) 在明·暗·不考虑的间进行选择, 異型零件
( 异形零件 ) 在明·暗·不考虑·正片·负片的间进行选择。
本體輔助樣本 ( 本体辅助样本 ) :
指定本体检出时使用的样本系数。将系数设定为
1 时,使用全部画素识别本体。
将系数设定为
2 时,在 2 × 2 画素中选择代表点进行本体识别。本体辅助样本取得越大,要用
识别时间越短。仅有选中了本体辅助样本自动确认时有效。
本體輔助樣本自動檢查 ( 本体辅助样本自动检查 ) :
设定是否自动计算适当本体辅助样本。
本體判定臨界值 ( 本体判定临界值 ) :
使用本体粗定位时,为了判断是否用本体定位而设定的临界值。
本體對腳極性 ( 本体对脚极性 ) :
设定本体和脚哪一个看起来更亮一些。通过明暗选择。
高精度模式 ( 高精度模式 ) :
设定是否为了得到更正确的认识结果而在高精度模式下测定脚前端。