SI-G200MK3_操作说明.pdf - 第330页
零件认识数据制作篇 1 . 操作 1-8 电子零件装着机 SI-G200Mk3 (CS) 图 1.2.2-2 腳參數 ( 脚参数 ) 腳彎曲容許值 ( 脚弯曲容许值 ) :设定被指定的一组脚的脚宽度方向的弯曲容 许值。不能不满 0 ,在 0.001 ~ 10 之间,设定为 0 时,不进 行确认。 腳補正 ( 脚补正 ) :设定被指定的一组脚的宽度方 向的中心与本体中心位置的 补 正值。 腳 尺寸容許值 ( 脚尺寸容许值 ) :设定被指定…
零件认识数据制作篇
1. 操作
电子零件装着机 SI-G200Mk3 (CS)
1-7
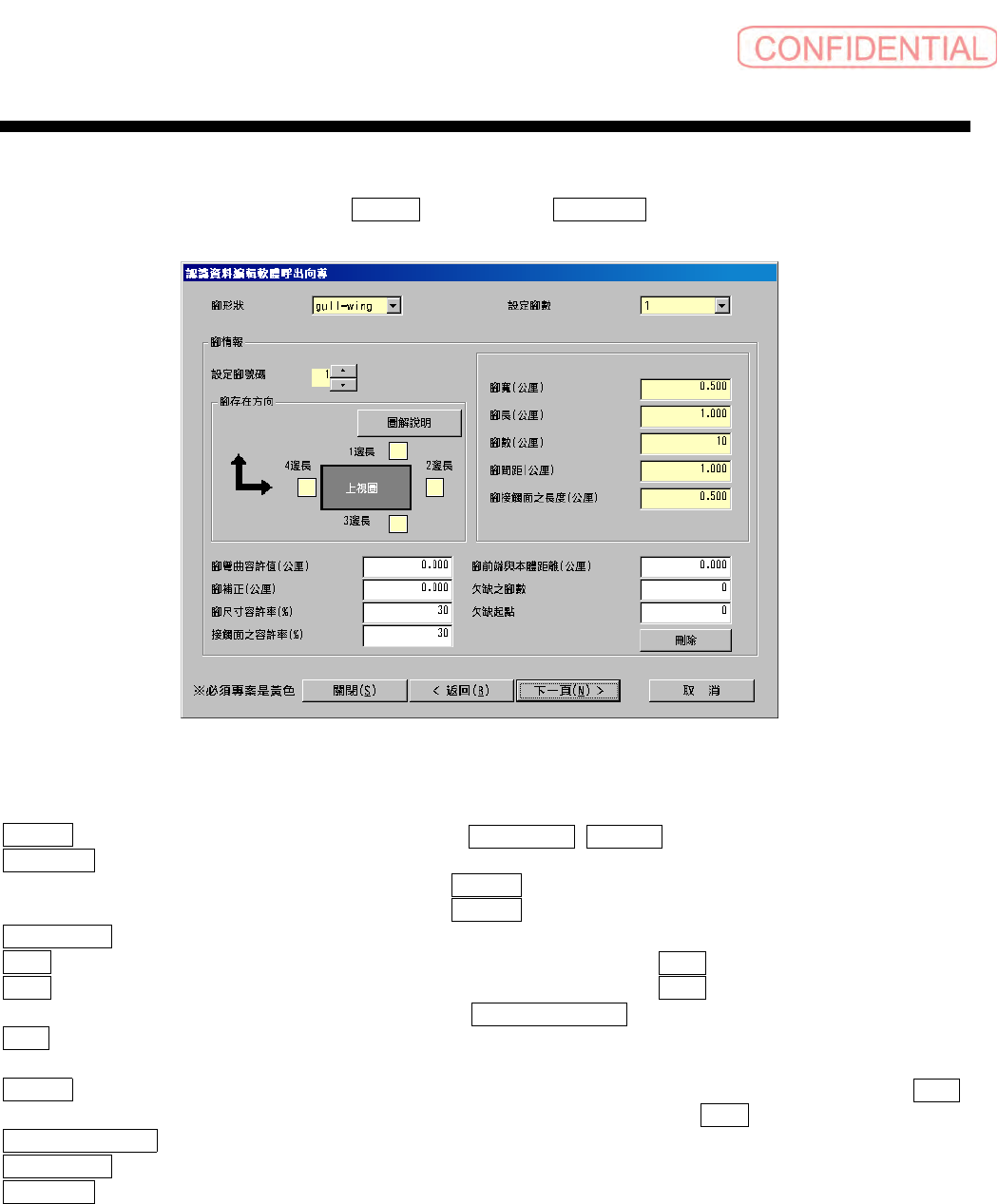
1.2.2 脚信息输入画面
基本信息输入画面上形状种类,选择 腳零件 ( 脚零件 ) 或 異型零件 ( 异形零件 ) ( 有 LEAD) 时显
示。
图
1.2.2-1
腳情報
(
脚信息
)
输入
画面
在成为必须项目的黄色区域内输入值。
腳形狀 ( 脚 z 形状 ) :在 gull-wing 、 j-lead 中选择。
設定腳數 ( 设定脚数 ) :设定脚数,最多可以设定为 6 组。
腳情報 ( 脚信息 ) 的设定,每组脚都进行。设定的
腳號碼 ( 脚号码 ) 的信息请与每组脚的号码相吻合。
設定腳號碼 ( 设定脚号码 ) :指设定中每组脚的号码。
腳寬 ( 脚宽 ) :设定被指定的一组脚的 腳寬 ( 脚宽 )。不可能是 0 以下。
腳長 ( 脚长) :设定被指定的一组脚的 腳長 ( 脚长 )。不可能是 0 以下。
比
腳接觸面之長度 ( 脚接触面的长度 ) 大。
腳數 ( 脚数 ) :设定被指定的每组脚的脚数。请输入实际存在的脚数。不
能是
0 以下。
腳間距 ( 脚间距 ) :设定被指定的一组脚的间距。不能是 0 以下,比 腳寬
(
脚宽 ) (最大值)大,( 腳數 ( 脚数 ) 是 1 时除外)
腳接觸面之長度 ( 脚接触面的长度 ) :设定被指定的一组脚的接触面的长度。不能是 0 以下。
腳 存在方向 ( 脚存在方向 )1、 2、 3 、 4 边 :设定被指定的一组脚存在的边,至少有一个边被确认。
圖解說明 ( 图解说明 ) :显示关于脚的项目的说明。
零件认识数据制作篇
1. 操作
1-8
电子零件装着机
SI-G200Mk3 (CS)
图
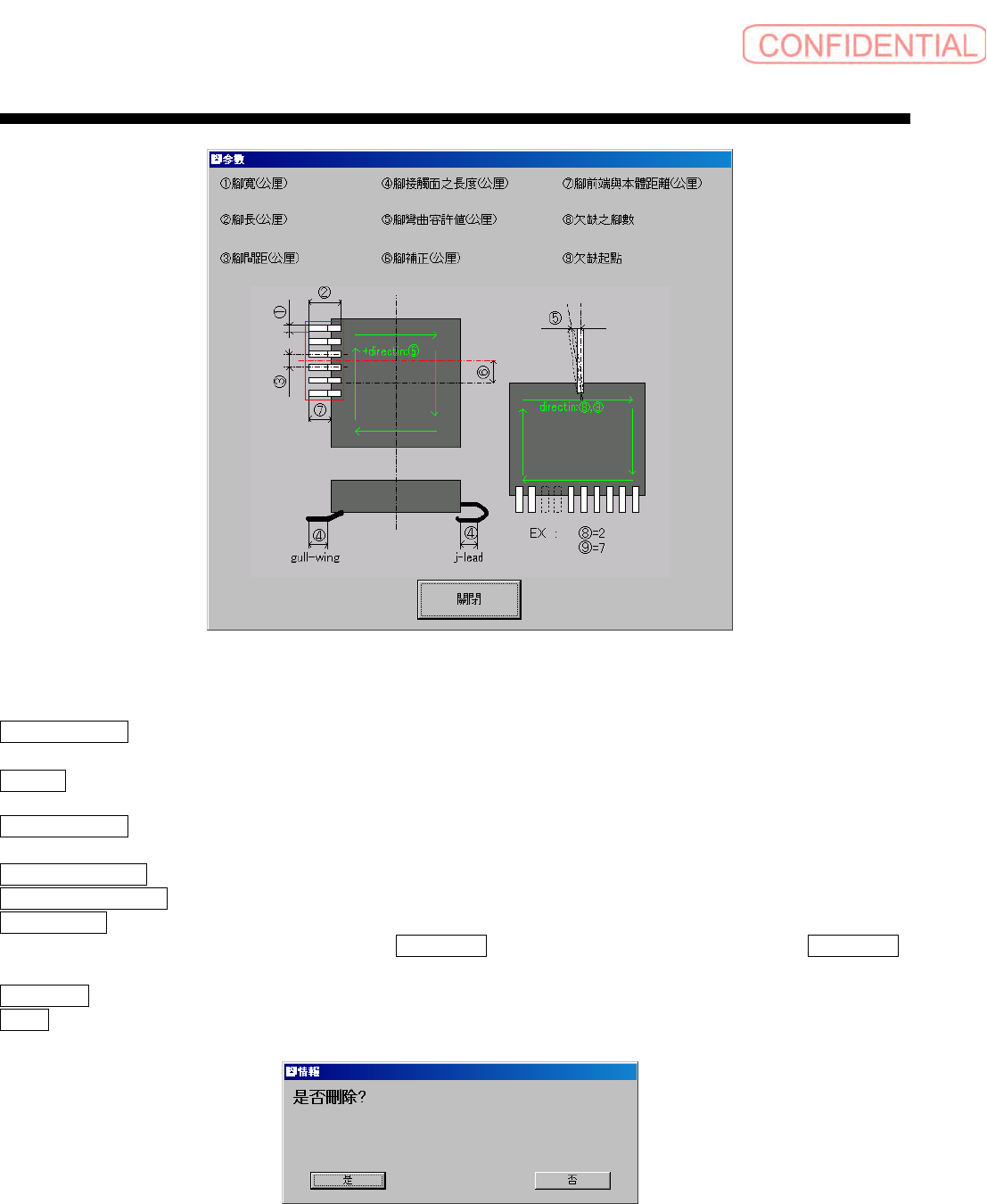
1.2.2-2
腳參數
(
脚参数
)
腳彎曲容許值 ( 脚弯曲容许值 ) :设定被指定的一组脚的脚宽度方向的弯曲容许值。不能不满
0,在 0.001 ~ 10 之间,设定为 0 时,不进行确认。
腳補正 ( 脚补正 ) :设定被指定的一组脚的宽度方向的中心与本体中心位置的补
正值。
腳尺寸容許值 ( 脚尺寸容许值 ) :设定被指定的一组脚的脚宽度、长度、间距的容许值。在
1 ~ 99 之间。
腳接觸面容許值 ( 脚接触面容许值 ) :设定被指定的一组脚接触面的容许率。在 1 ~ 99 之间。
腳前端與本體距離 ( 脚前端与本体距离 ) :设定被指定的一组脚的脚前端与本体的距离。
欠缺之腳數 ( 欠缺的脚数 ) :指定被指定的一组脚的欠缺脚数。不小于 0。 0 的时候,
欠缺起點 ( 欠缺起点 ) 未满 0 , 1 以上的时候,欠缺起點
(
欠缺起点 ) 在 1 以上。
欠缺起點 ( 欠缺起点 ) :指定被指定的一组脚的脚欠缺开始的位置。
刪除 ( 删除 ) :将被指定的一组脚删除。
图
1.2.2-3
删除确认
零件认识数据制作篇
1. 操作
电子零件装着机 SI-G200Mk3 (CS)
1-9
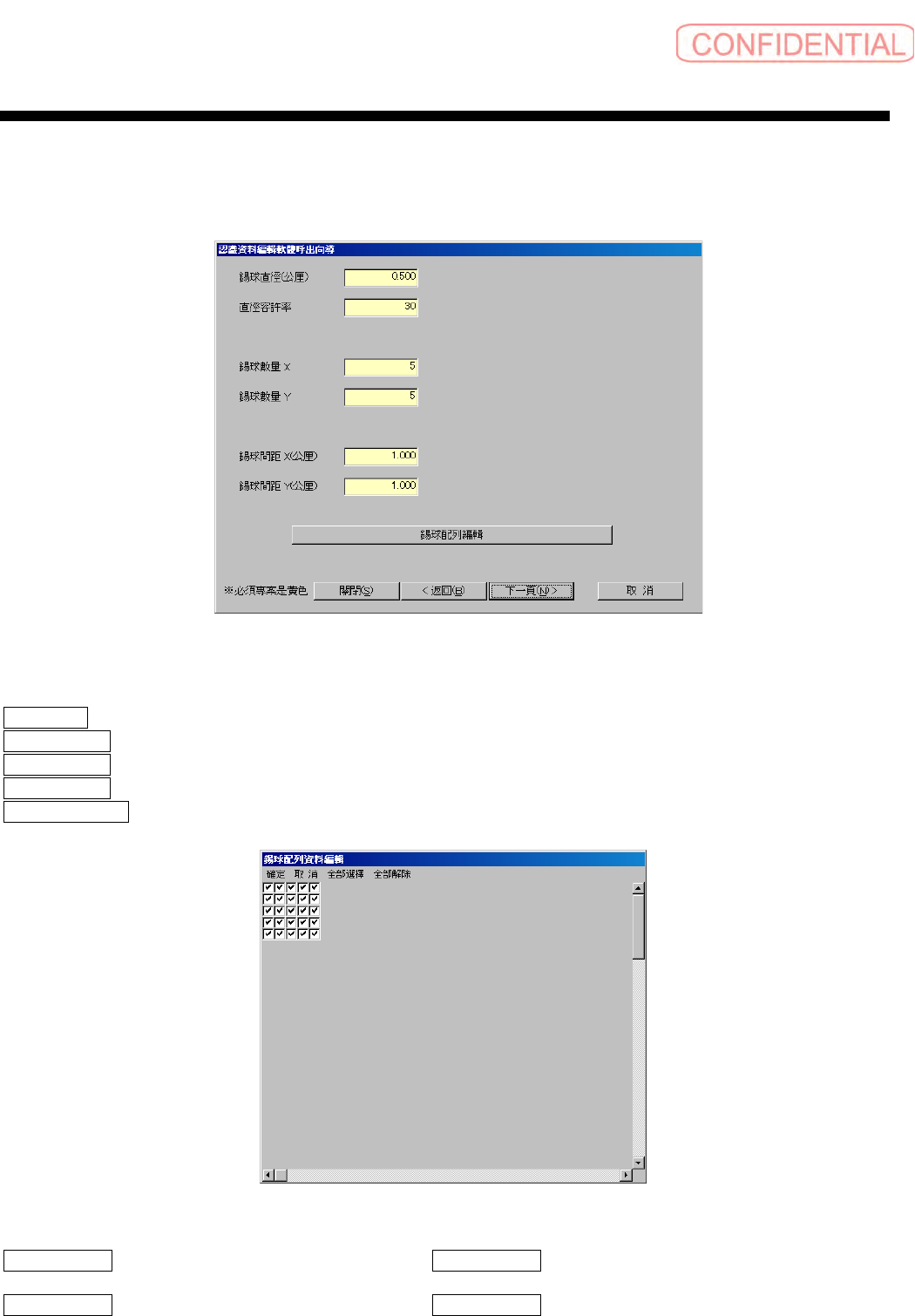
1.2.3 BGA 信息输入画面
在基本信息输入画面上的形状种类中,选择 BGA 零件时显示。
图
1.2.3-1 BGA
信息输入
画面
在成为必须项目的黄色区域中输入值。
錫球直徑 ( 锡球直径 ) :不能是 0 以下。
直徑容許率 ( 直径容许率 ) :在 1 ~ 99 之间。
錫球數量 X ( 锡球数量 X) :在 1 ~ 100 之间。
錫球數量 Y ( 锡球数量 Y) :在 1 ~ 100 之间。
錫球配列編輯 ( 锡球配列编辑 ) :显示锡球配列编辑画面。
图
1.2.3-2
錫球配列編輯
(
锡球配列编辑
)
錫球間距 X ( 锡球间距 X) :不少于 0 ,当 錫球數量 X ( 锡球数量 X) 在 2 以上的时候,要大
于锡球直径。
錫球間距 Y ( 锡球间距 Y) :不少于 0 ,当 錫球數量 Y ( 锡球数量 Y) 在 2 以上的时候,要大
于锡球直径。