RX-7R_维修手册.pdf - 第104页
第 2 章 操作顺序书 2- 2. 制造设置菜 单 Stag e 10 :外部 I/F 确认项目 No. 控制名称 部位 Bit 装置 判断 方式 向下一 画面转移 显示 条件 1 开始联锁 ON /OFF [SDI O] (IN) 00,01 BI T03 - C 确认 OK - 2 运入 SMEMA 信号 确认(前)上游 [SDI O] (OU T) 02,03 BI T04 - F 确认 OK - [SDI O] (I N) …
第
2
章
操作顺序书
2-2. 制造设置菜单
No.
控制名称
部位
Bit
装置
判断
方式
向下一
画面转移
显示
条件
16
夹钳上升/下降
(前 R)
[CAN]
(OUT) BKUP
02,03 BIT00
-
F
确认
OK
-
夹钳上升
(
前
L)
极
限
[CAN]
(IN) BKUP
04,05 BIT03
17
夹钳上升/下降
(后 R)
[CAN]
(OUT) BKUP
02,03 BIT02
-
F
确认
OK
D
传送
夹钳上升
(
后
R)
极
限
[CAN]
(IN) BKUP
04,05 BIT07
18
夹钳上升/下降
(前 L)
[CAN]
(OUT) BKUP
02,03 BIT01
-
F
确认
OK
-
夹钳上升
(
前
L)
极
限
[CAN]
(IN) BKUP
04,05 BIT01
19
夹钳上升/下降
(后 L)
[ CAN]
(OUT) BKUP
02,03 BIT03
-
F
确认
OK
D
传送
夹钳上升
(
后
L)
极
限
[CAN]
(IN) BKUP
04,05 BIT05
20
供料器浮起检测
(高速)
[SDIO]
(IN)
04,05 BIT11
-
D
自动
-
22
基板停止器上升
/
下
降
(前 R)
[CAN]
(OUT)
TRANS
02,03 BIT00
-
F
确认
OK
-
[SDIO]
(IN)
04,05 BIT00
23
基板停止器上升
/
下
降
(后 R)
[CAN]
(OUT)
TRANS
02,03 BIT02
-
F
确认
OK
D
传送
[SDIO]
(IN)
04,05 BIT02
24
基板停止器上升
/
下
降
(前 L)
[CAN]
(OUT)
TRANS
02,03 BIT01
-
F
确认
OK
-
[SDIO]
(IN)
04,05 BIT01
25
基板停止器上升
/
下
降
(后 L)
[CAN]
(OUT)
TRANS
02,03 BIT03
-
F
确认
OK
D
传送
[SDIO]
(IN)
04,05 BIT03
26
Stage 9
结束确认
自动
手动
-
29
第
2
章
操作顺序书
2-2. 制造设置菜单
Stage 10:外部 I/F 确认项目
No.
控制名称
部位
Bit
装置
判断
方式
向下一
画面转移
显示
条件
1
开始联锁
ON/OFF
[SDIO]
(IN)
00,01 BIT03
-
C
确认
OK
-
2
运入
SMEMA
信号
确认(前)上游
[SDIO]
(OUT)
02,03 BIT04
-
F
确认
OK
-
[SDIO]
(IN)
02,03 BIT12
3
运入
SMEMA
信号
确认(后)上游
[SDIO]
(OUT)
02,03 BIT05
-
F
确认
OK
D
传送
[SDIO]
(IN)
02,03 BIT13
4
运入
SMEMA
信号
确认(前)下游
[SDIO]
(OUT)
02,03 BIT06
-
F
确认
OK
-
[SDIO]
(IN)
02,03 BIT14
5
运入
SMEMA
信号
确认(后)下游
[SDIO]
(OUT)
02,03 BIT07
-
F
确认
OK
D
传送
[SDIO]
(IN)
02,03 BIT15
6
Stage 10
结束确认
自动
手动
-
Stage11
:稳定性确认项目(重新确认)
确认与 Stage1 相同的内容。
30
第
2
章
操作顺序书
2-2. 制造设置菜单
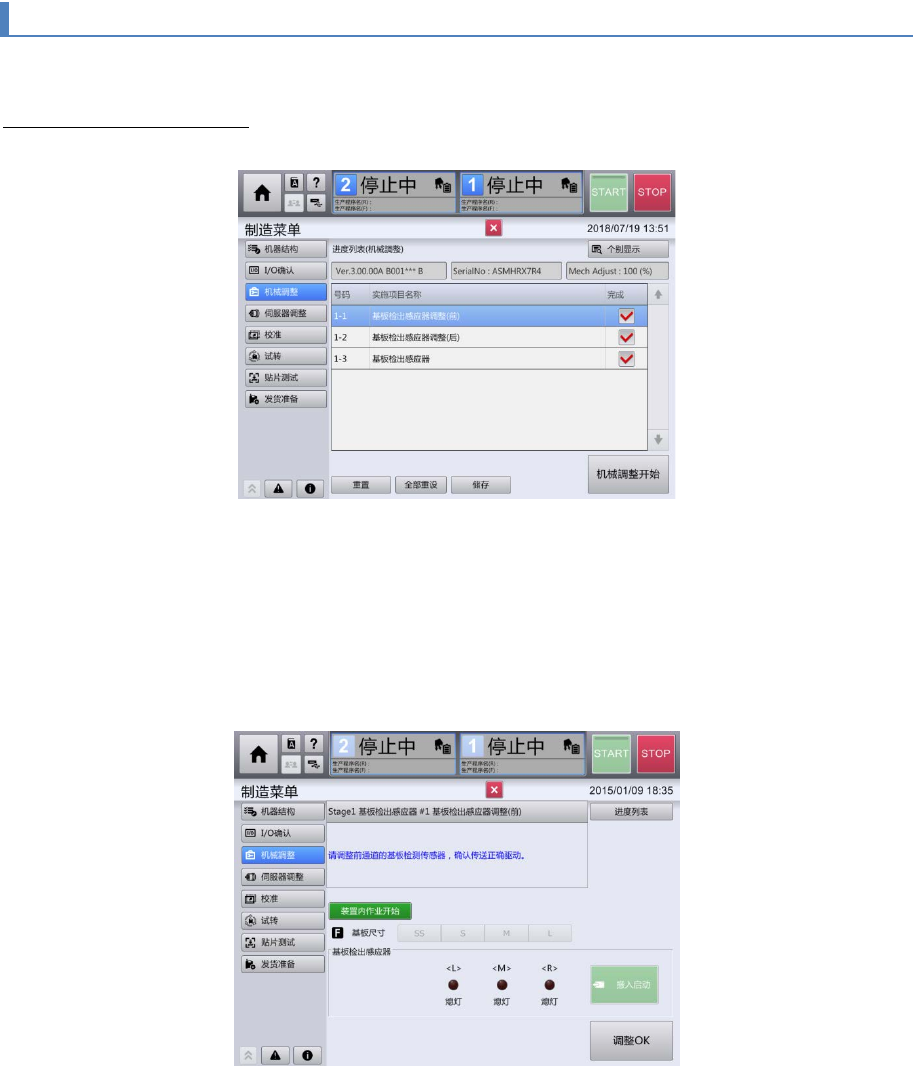
2-2-3.
机械调整
这里,对象是通过画面操作进行机械调整的项目。
Stage1
:基板检出传感器
1
从画面左侧的子菜单中触摸[机械调整]。
显示[进度列表]画面。
2
触摸[开始机械调整]。
显示如下画面。首先对前通道的基板检出传感器进行调整。
3
触摸[装置内作业开始]。
进行左右一次性更换台车下降、前面护罩解除锁定。
4
选择要使用的基板尺寸。
显示[传送通道微调操作]画面。
31