RX-7R_维修手册.pdf - 第108页
第 2 章 操作顺序书 2- 2. 制造设置菜 单 2-2- 4 . 伺服调整 确认轴的伺服参 数是否恰当, 同时根据需要 更改 参数 以消除轴动 作的装置间个 体差。 伺服调整通过以下 3 步 Stage 进行作业。 • Stage1 :磁 极 检测 • Stage2 :暂定 原点 确定 • Stage3 :伺服器调整 注意 • 如不进行磁 极检测 就将伺服的电源置于 ON ,轴可能 以规定值 以上 的 速度移 动,在装 置内引起碰撞…

第
2
章
操作顺序书
2-2. 制造设置菜单
机械调整的确认项目
No.
控制名称
部位
Bit
装置
判断
方式
向下一
画面转移
1
基板检出传感器(前
R
)
[CAN] (IN)
传送
00,01 BIT01
-
手动
手动
2
基板检出传感器(前
C
)
00,01 BIT00
3
基板检出传感器(前
L
)
00,01 BIT08
4
基板检出传感器(后
R
)
[CAN] (IN)
传送
00,01 BIT03
-
手动
手动
5
基板检出传感器(后
C
)
00,01 BIT02
6
基板检出传感器(后
L
)
00,01 BIT09
-
Stage1
结束确认
自动
手动
33
第
2
章
操作顺序书
2-2. 制造设置菜单
2-2-4.
伺服调整
确认轴的伺服参数是否恰当,同时根据需要更改参数以消除轴动作的装置间个体差。
伺服调整通过以下 3 步 Stage 进行作业。
•
Stage1:磁极检测
•
Stage2:暂定原点确定
•
Stage3:伺服器调整
注意
•
如不进行磁极检测就将伺服的电源置于 ON
,轴可能以规定值以上的速度移动,在装
置内引起碰撞。
Stage1
:磁极检测
1
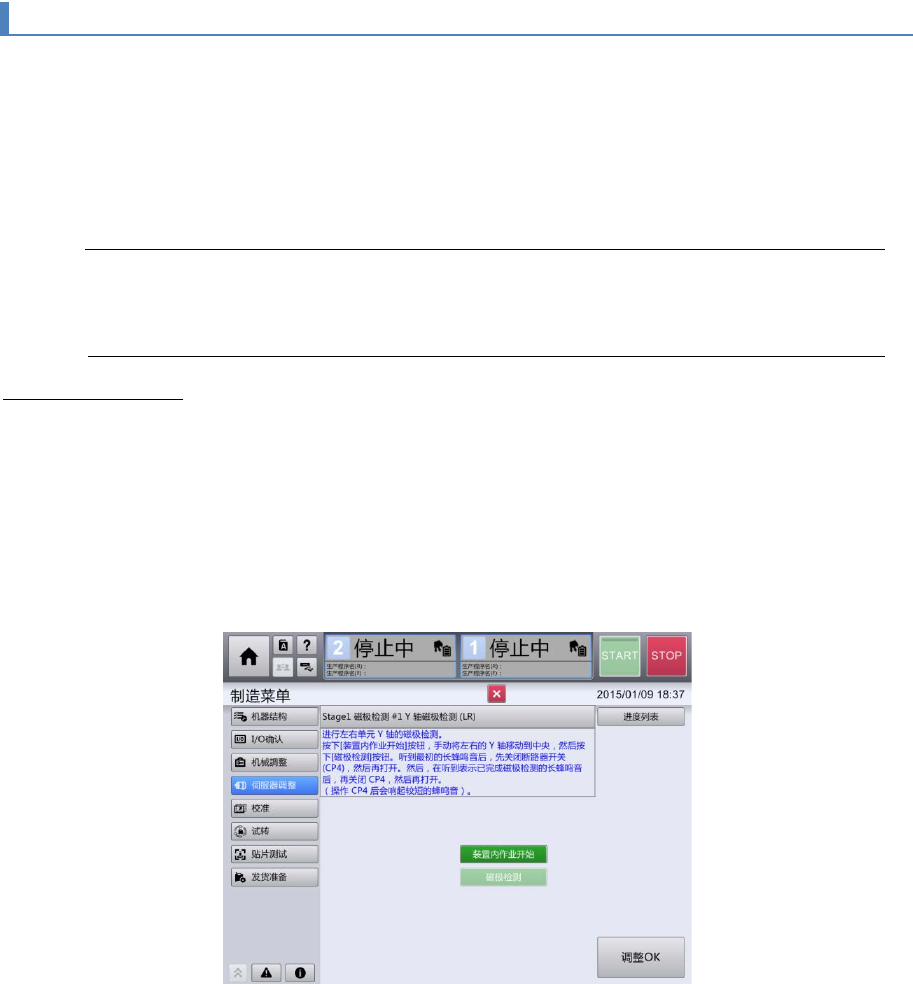
从画面左侧的子菜单中触摸[伺服器调整]。
显示[进度列表]画面。
2
触摸[伺服器调整开始]。
显示如下画面。
3
触摸[装置内作业开始]。
进行左右一次性更换台车下降、前面护罩解除锁定。
4
打开前面护罩,将右侧装置之贴装头机构的
Y
轴以手动方式移动到装置中央部。
5
触摸[磁极检测]。
34
第
2
章
操作顺序书
2-2. 制造设置菜单
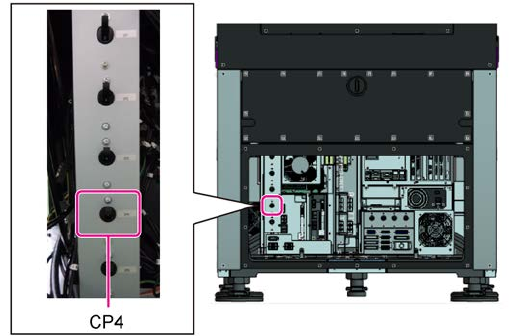
6
确认有嘟嘟声发出,打开本机后侧的护罩,将断路器开关
(CP4)
先
OFF
一下再置于
ON
。
本机检测出断路器开关的切换,如没有问题则[调整 OK]按钮生效。
磁极检测失败时,会显示错误信息。
7
触摸[调整
OK
]。
显示[Stage 2 暂定原点确定]的[个别显示]画面。
35