RX-7R_维修手册.pdf - 第462页
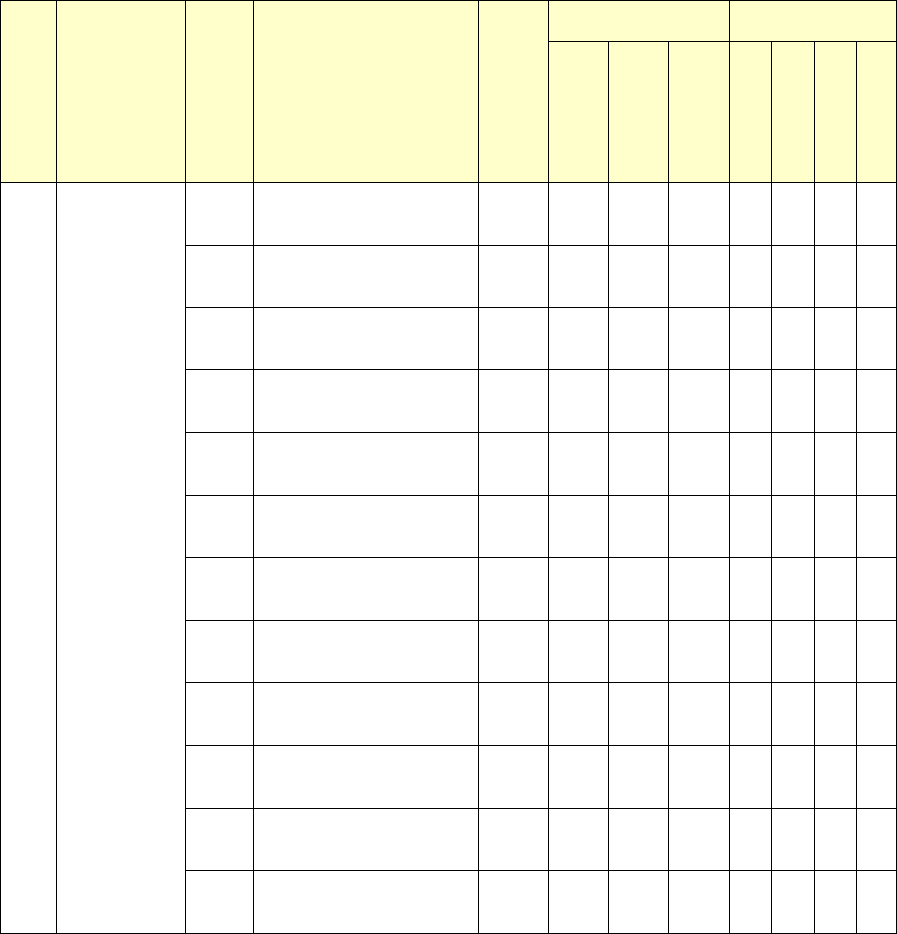
第 7 章 故障分析 7- 1. 伺服放大器 (MR- J 4) 编 号 名称 详细 显示 详细名称 停止 方式 *4 *5 警报复位 运行方式 错误 复位 C P U 复 位 电 源 OFF ↓ ON 标 准 全 闭 环 线 性 电 动 机 D D 71 机械端 编码 器 正常通 信故障 1 71.1 机械端 编码 器通信 接收 数据故障 1 EDB - - ○ - ○ - - 71.2 机械端 编码 器通信 接收 数据故障 2 ED…
第
7
章
故障分析
7-1.
伺服放大器 (MR-J4)
编
号
名称
详细
显示
详细名称
停止
方式
*4 *5
警报复位
运行方式
错误
复位
C
P
U
复
位
电
源
OFF
↓ON
标
准
全
闭
环
线
性
电
动
机
D
D
70 机械端编码
器 初始通
信故障 1
70.1 机械端编码器初始通信
接收数据故障 1
DB - - ○ -
○ - -
70.2 机械端编码器初始通信
接收数据故障 2
DB - - ○ -
○ - -
70.3 机械端编码器初始通信
接收数据故障 3
DB - - ○ -
○ - -
70.5 机械端编码器初始通信
发送数据故障 1
DB - - ○ -
○ - -
70.6 机械端编码器初始通信
发送数据故障 2
DB - - ○ -
○ - -
70.7 机械端编码器初始通信
发送数据故障 3
DB - - ○ -
○ - -
70.A 机械端编码器初始通信
处理故障 1
DB - - ○ -
○ - -
70.B 机械端编码器初始通信
处理故障 2
DB - - ○ -
○ - -
70.C 机械端编码器初始通信
处理故障 3
DB - - ○ -
○ - -
70.D 机械端编码器初始通信
处理故障 4
DB - - ○ -
○ - -
70.E 机械端编码器初始通信
处理故障 5
DB - - ○ -
○ - -
70.F 机械端编码器初始通信
处理故障 6
DB - - ○ -
○ - -
15
第
7
章
故障分析
7-1. 伺服放大器 (MR-J4)
编
号
名称
详细
显示
详细名称
停止
方式
*4 *5
警报复位
运行方式
错误
复位
C
P
U
复
位
电
源
OFF
↓ON
标
准
全
闭
环
线
性
电
动
机
D
D
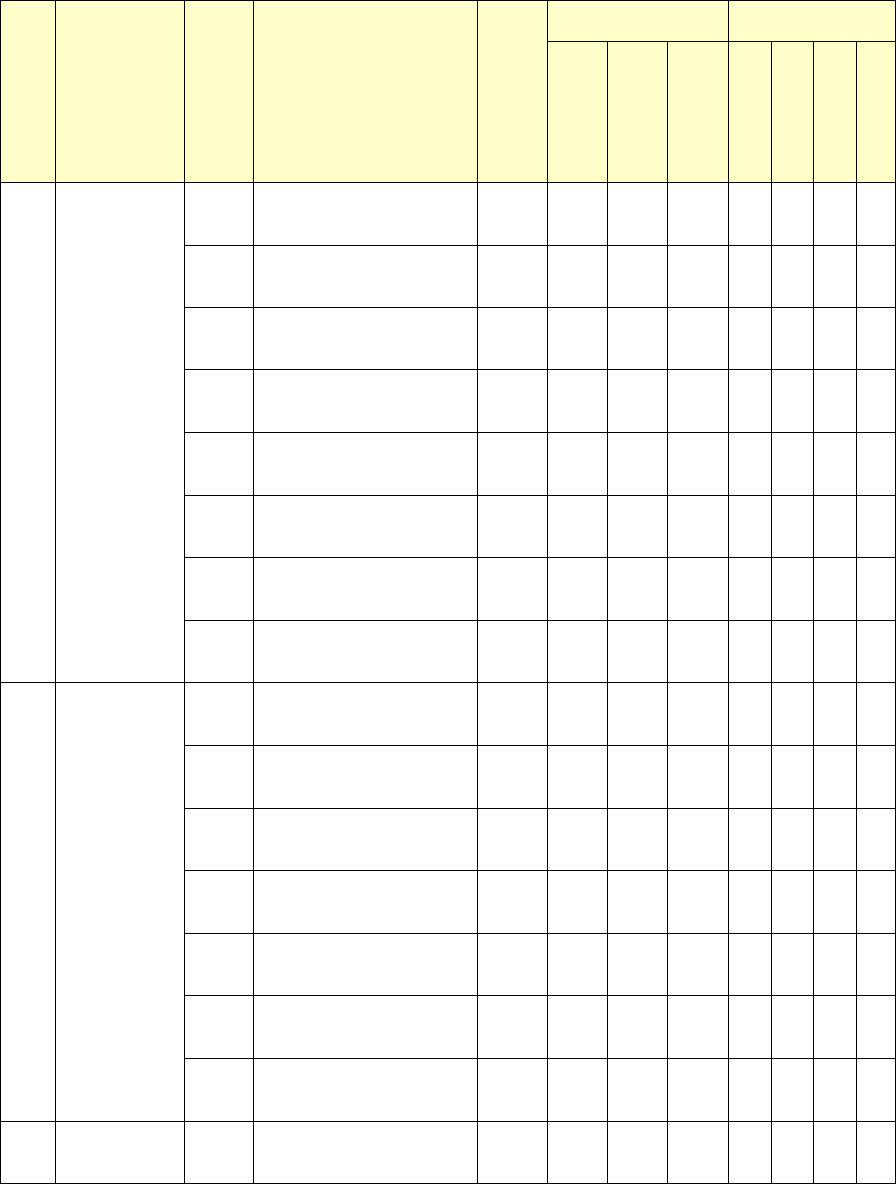
71 机械端编码
器 正常通
信故障 1
71.1 机械端编码器通信接收
数据故障 1
EDB - - ○ - ○ -
-
71.2 机械端编码器通信接收
数据故障 2
EDB - - ○ - ○ -
-
71.3 机械端编码器通信接收
数据故障 3
EDB - - ○ - ○ -
-
71.5 机械端编码器通信发送
数据故障 1
EDB - - ○ - ○ -
-
71.6 机械端编码器通信发送
数据故障 2
EDB - - ○ - ○ -
-
71.7 机械端编码器通信发送
数据故障 3
EDB - - ○ - ○ -
-
71.9 机械端编码器通信发送
数据故障 4
EDB - - ○ - ○ -
-
71.A 机械端编码器通信发送
数据故障 5
EDB - - ○ - ○ -
-
72 机械端编码
器 正常通
信故障 2
72.1 机械端编码器数据故障
1
EDB - - ○ - ○ -
-
72.2 机械端编码器数据更新
故障
EDB - - ○ - ○ -
-
72.3 机械端编码器数据波形
故障
EDB - - ○ - ○ -
-
72.4 机械端编码器无信号故
障
EDB - - ○ - ○ -
-
72.5 机械端编码器硬件故障
1
EDB - - ○ - ○ -
-
72.6 机械端编码器硬件故障
2
EDB - - ○ - ○ -
-
72.9 机械端编码器数据故障
2
EDB - - ○ - ○ -
-
8A USB 通信
超时故障
8A.1 USB 通信 超时故障 SD ○ ○ ○ ○ ○ ○
○
16
第
7
章
故障分析
7-1.
伺服放大器 (MR-J4)
编
号
名称
详细
显示
详细名称
停止
方式
*4 *5
警报复位
运行方式
错误
复位
C
P
U
复
位
电
源
OFF
↓ON
标
准
全
闭
环
线
性
电
动
机
D
D
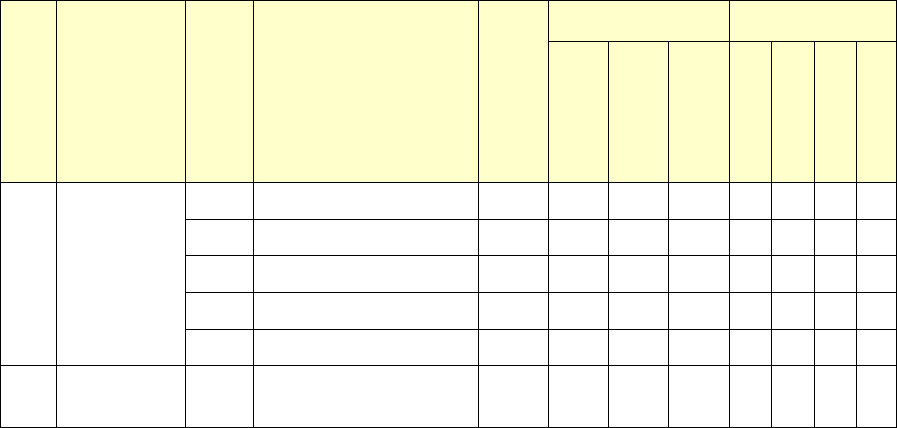
8E USB 通信故
障
8E.1 USB 通信接收错误 SD ○ ○ ○ ○
○ ○ ○
8E.2 USB 通信检查和的错误 SD ○ ○ ○ ○
○ ○ ○
8E.3 USB 通信字符错误 SD ○ ○ ○ ○
○ ○ ○
8E.4 USB 通信命令错误 SD ○ ○ ○ ○
○ ○ ○
8E.5 USB 通信数据号码错误 SD ○ ○ ○ ○
○ ○ ○
888 “看门狗”
监视
88._ “看门狗”监视 DB - - ○ ○
○ ○ ○
* 1
排除发生原因后,请隔开约 30 分钟的冷却时间。
* 2
要看控制器的通信状态,有时无法排除警报起因。
* 3
按如下所示设置,就可以解除警报。
•
全闭环控制时:将[Pr. PE03]设置为"1 _ _ _"
•
使用线性伺服电动机及直接传动电动机时:将[Pr. PL04]设置为"1 _ _ _"
* 4
停止方式如下所示。
•
DB:动力制动器停止(如果产品已去除了动力制动器,则为自由运转)
•
EDB :如是 600 W 以下的伺服放大器时,为电子式动力制动器停止
如是 700 W 以上的伺服放大器时,为动力制动器停止
•
SD:强制停止减速
* 5
初始值为[Pr. PA04]的情况下。SD 的警报可以用[Pr. PA04]将停止方式变更为 DB 。
* 6
这一警报仅在 J3 兼容方式下发生。
17