RS-1使用說明書.pdf - 第686页
第 2 部 功能详 解篇 第 6 章 通 用图像元件 6- 44 ・ 交错排列的 BGA 等可定义为 2 个方格的球形组, 此时,即使球 形组区域相互重叠 ,也可以进 行指定,但球不许相 互重叠,而且各球 中心的相互距 离也必须离开各直径 的 1. 5 倍以上。 元件要素 组 1 元件要素 组 2 D L D :球面径 L : 球面中心间距离 应 L ≥ 1.5D < BOTTOM VIEW > ・ 若在球形组内只指定 一部…
第 2 部 功能详解篇 第 6 章 通用图像元件
6-43
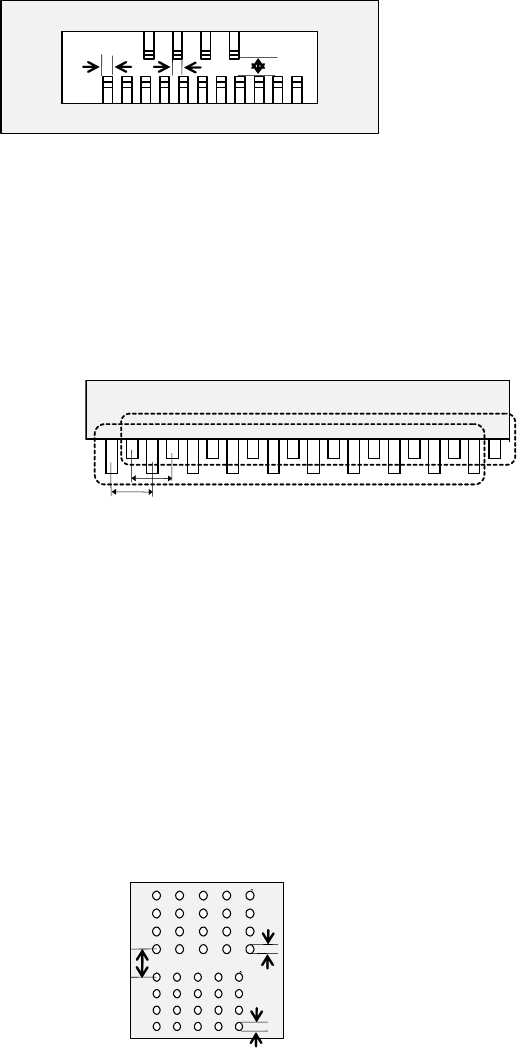
・ 在引脚的长度方向上有其他引脚组的情况下,必须定位在离开 1 个引脚宽度,且相隔 1mm 以
上的位置。
W1
W1 :元件要素组 1 间距
W2 :元件要素组 2 间距
L :元件要素组间的引脚长度
方向的距离
应为 L≥W1 且 L≥W2 且 L≥1mm
W2
L
<TOP VIEW>
・ 在有多个引脚组的情况下,无论是定义所有的引脚组还是只定义某个引脚组进行识别,都必须
满足上述邻接条件。
・ 对于引脚长度不一的连接器来说,可分别仅对长引脚组或仅短引脚组进行定义,此时,即使引
脚组区域相互重叠,只要引脚不相互重叠,便可进行指定,而无需考虑上述邻接条件,除非引
脚弯曲重叠,否则即可识别。
第 2 元件要素组
间距 1
间距 2
第
1 元件要素组
<TOP VIEW
>
・ 若在引脚组内只指定一部分引脚,则无法保证识别。
・ 1 个引脚不能在不同的引脚组中定义。 另外,也不可进行引脚相互重叠的定义。请务必注意,
弄错引脚间距、引脚个数以及引脚宽度有时会完成这样的定义。
・ 在引脚元件要素的元件要素类型中不能指定内部引脚。若指定,则无法保证识别。
4. 球元件类的限制事项
・ 必须至少有 1 个球组有 3 个以上相同尺寸的球。
・ 相近尺寸的球/Land(直径 1.5 倍以下)的组相邻时,各中心必须在距离球/Land 直径 2 倍以上的
位置上。
D1 :元件要素组 1 的球面径
D2 :元件要素组 2 的球面径
L :球面中心间的距离
当 D1≤1.5D2 或 D2≤1.5D1 时
应 L≥2D1 且 L≥2D2
<BOTTOM VIEW>
L
D1
D2
・ 在有多个球形组的情况下,无论是定义所有的球形组还是只定义某个球形组进行识别,都必须
满足上述邻接条件。

第 2 部 功能详解篇 第 6 章 通用图像元件
6-44
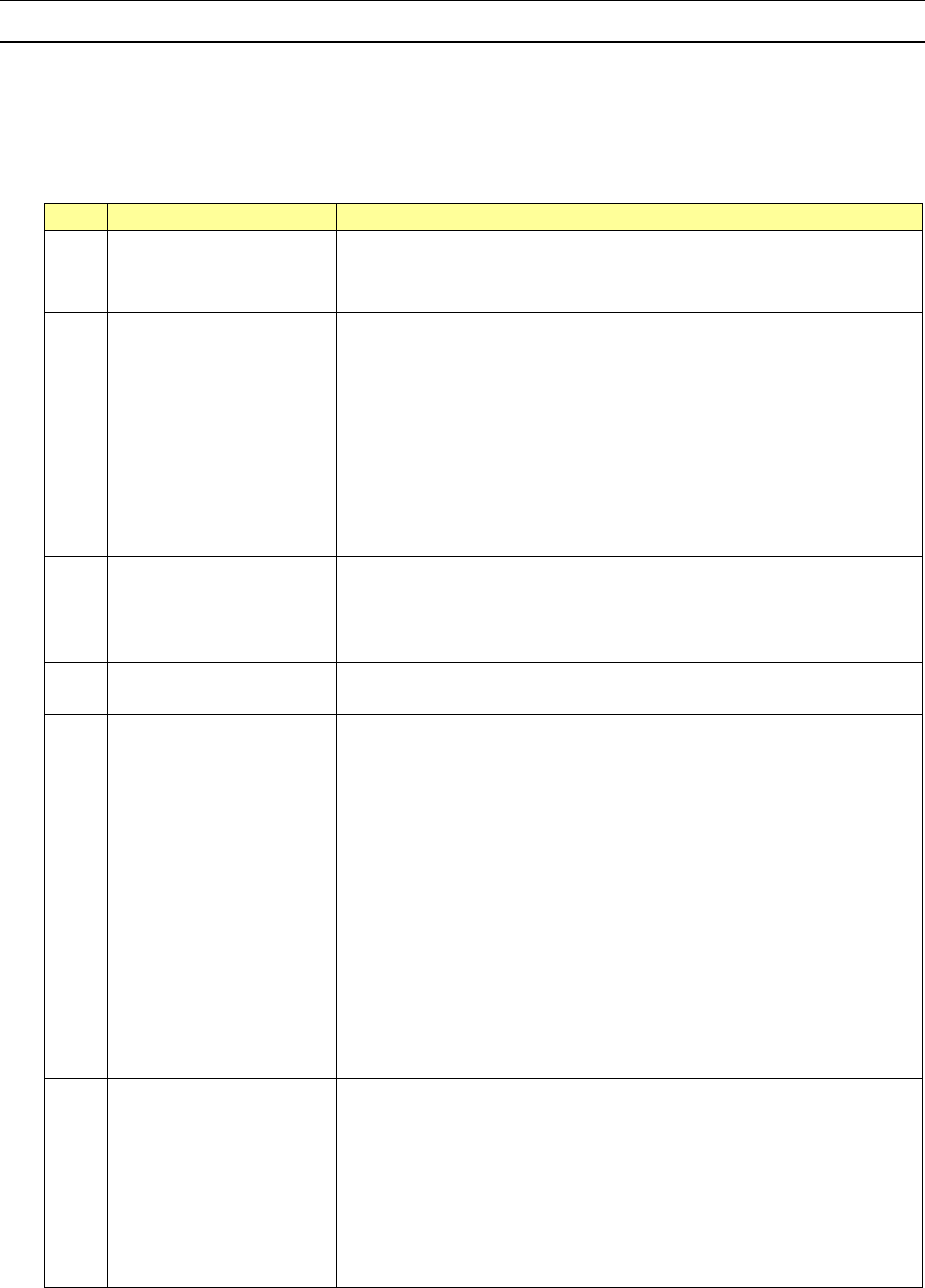
・ 交错排列的 BGA 等可定义为 2 个方格的球形组,此时,即使球形组区域相互重叠,也可以进
行指定,但球不许相互重叠,而且各球中心的相互距离也必须离开各直径的 1.5 倍以上。
元件要素组 1
元件要素组 2
D
L
D:球面径
L:球面中心间距离
应 L≥1.5D
<BOTTOM VIEW>
・ 若在球形组内只指定一部分球,则无法保证识别。
・ 直径检测精度处在直径±50%以下时,可识别的间距与可识别的球直径将会受到很大的限制。
・ 四方形 Land 必须是正方形。(但长方形的 Land 其引脚宽度与长度的比在 1:1 以下时,有可能
作为引脚来识别。)
・ 1 个球不能在不同的球形组中定义。另外,也不可进行球相互重叠的定义。即使弄错球间距、
球行列数以及球直径有时也会成为这样的定义,请务必注意。
5. 外形元件类的限制
・ 指定 1 种引脚和球以外的元件要素(角、边、标记)时,必须指定 2 处以上。单独指定其他类型
的元件要素时,除了边之外,只能指定 1 处。
・ 角最多可指定 4 处,具有相同指定角度(θ 偏移)的角只能指定 1 个。
虽然θ0°的角有 2 个,
但是只能指定 1 个
<TOP VIEW>
θ270°角
θ0°角 2
θ0°角 1
θ90°角
θ180°角
・ 有相邻近的相同指定角度(θ 偏移)的角或有角的元件要素(引脚、四方形 Land、四方形标记)时,
必须用 VCS (54mm 视野) 换算使角离开 4mm 以上。
・ 边最多可指定 4 个边,但具有相同指定角度(θ 偏移)的边只能指定 1 个 。最 外围的边,边的长度
必须为元件尺寸的 1/2 以上。仅在指定边时才必须包括正交的 2 边。
・ 设置元件要素的直线部分按照 VCS (54mm 视野) 换算为 4.0mm(±2.0mm)以上。
・ 元件内测为黑色时,边缘部分的厚度为 0.3mm 以上。
・ 标记最多可指定 3 个。
・ 孔也可指定圆形标记的极性反转(暗),但图像必须映照成规则的圆形。(请注意,用透射照明识
别厚元件时,孔有时不能映照成规则的圆形。)
・ 有邻近的尺寸相同的标记或有相同形状相同尺寸的元件要素(球、圆形 Land)时,必须用 VCS
(54mm 视野) 换算使标记离开 5mm 以上。
6. 使用通用图像元件数据格式时的注意事项
· 请将其适用于有位置精度时,且必须识别的元件要素组(尤其是引脚)。若将其用于位置精度
偏差较大的元件要素组(尤其是引脚),则易于出现识别错误。
第 2 部 功能详解篇 第 7 章 操作选项
7-1
第
7
章
操作选项
7-1 概要
在启动后的菜单中按[机器设置]-[操作选项],或在生产的菜单中按[工具]-[操作选项],可显示「操作
选项设置画面-全部」。
设置制作程序时,或生产时的动作条件等。
操作选项中可设置的项目如下。
序号
操作选项组
可设置项目
1 全部
资源管理器的限制功能
安全盖(安全罩,下同)被打开时操作面板按钮无效功能
系统结束时的数据保持功能
2
图像(示教)
以
BOC
排列贴片位置
数字放大
使用4倍放大
自动示教
检测能同时吸取的范围
取消吸取高度的自动示教
标记自动示教功能
标记尺寸的上限值
标记尺寸的下限值
3 图像(标记识别)
送料器台架标记识别
识别 BOC 时阈值的自动变更
识别 BOC 时阈值自动变更下限值
忽略焊锡识别错误在贴片坐标上贴装
4 图像(标记识别动作)
优先
BOC
标记识别
实施各电路
BOC
标记的优化
5 生产(显示)
倒计基板生产数量
累计基板生产数量
选择开始生产(ONLINE),切换到生产画面
退出时不显示保存提示
继续生产时,缺省值为「停止继续生产」
继续生产时,缺省值为「重新固定基板后生产」
不是继续生产时,缺省值为「搬入基板后生产」
元件用尽含在吸取错误数当中
开始生产时,显示吸取错误
无元件暂停时细分错误
生产中最差送料器的表示方法
不要输出(输出共面检测的详细情报)
只输出电极出错信息(输出共面检测的详细情报)
输出全部电极信息(输出共面检测的详细情报
)
6 生产(功能)
生产被中断后,执行继续生产
所有电路都是坏板标记时结束生产
空打时忽视传送功能
实施元件剩余数量管理
预备相同元件送料器
不执行生产开始前的真空检查
停止循环时动作
矩阵电路的贴片顺序