Administrator’s Guide(CP45FV) Eng.pdf - 第142页
Samsung Component Placer CP45FV Series Administrator ’ s Guide Dumps the corresponding component to the dum p box. <Close> button Closes the dialog box. <Feeder Move> button Moves the cursor only to the…
Feeder Setup
8-9
When the stick feeder is installed in the corresponding slot, set the Z position to
pick up the component supplied from the stick feeder.
<R> column
When the stick feeder is installed in the corresponding slot, set the R
position(rotation angle of the head) to pick up the component supplied from the
stick feeder.
<PartR> column
When the stick feeder is installed in the corresponding slot, set the placement
angle of the component supplied from the stick feeder.
<SK> column
When the stick feeder is installed in the corresponding slot, select whether or not
to pick up the component supplied from the stick feeder.
To pick it up, leave the check box as it is, and not to pick it up, check the check
box.
<Dump> column
When the stick feeder is installed in the corresponding slot, select the dump box
for the component placed on the stick feeder. Available dump boxes are as
follows.
System Dump: The dump box set in the system, it is installed in the front of the
conveyor.
User Dump: The dump box set in the system by the user, the location should be
set in the system..
<Pick> button
Executes component pickups operation from the stick feeder installed on the current
line in the grid. At this time, the device must be selected first. When pickups is
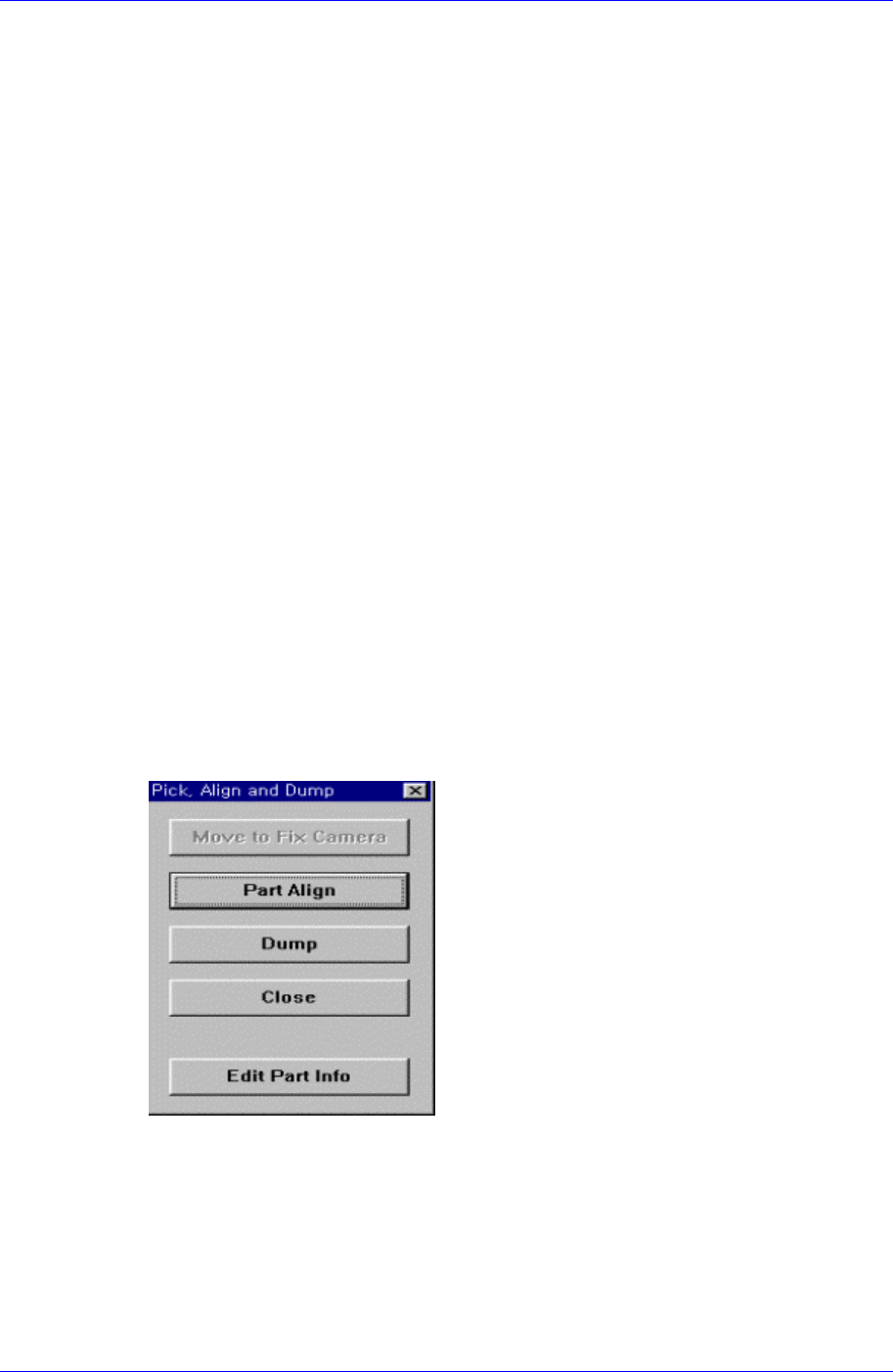
successful, the following dialog box is displayed.
<Move to Fix Camera> button
It is activated only when the corresponding component is aligned by the vision
camera and the align camera is fix camera. When this button is clicked on, moves
the head block to the position of the fix camera.
<Part Align> button
Executes alignment of the corresponding component.
<Dump> button
Samsung Component Placer CP45FV Series Administrator’s Guide
Dumps the corresponding component to the dump box.
<Close> button
Closes the dialog box.
<Feeder Move> button
Moves the cursor only to the grid area in which the feeder is mounted.
<Move Prev>
button
Moves the selected device to the slot on the first line with stick feeder installation
among the lines before the current line in the grid.
<Move Next>
button
Moves the selected device to the slot on the first line with stick feeder installation
among the lines after the current line in the grid.
<2Pt. Teach…> button
When teaching stick feeder pickups point, the center point is calculated by teaching
two corner points at opposite angles of the pocket with the component. When this
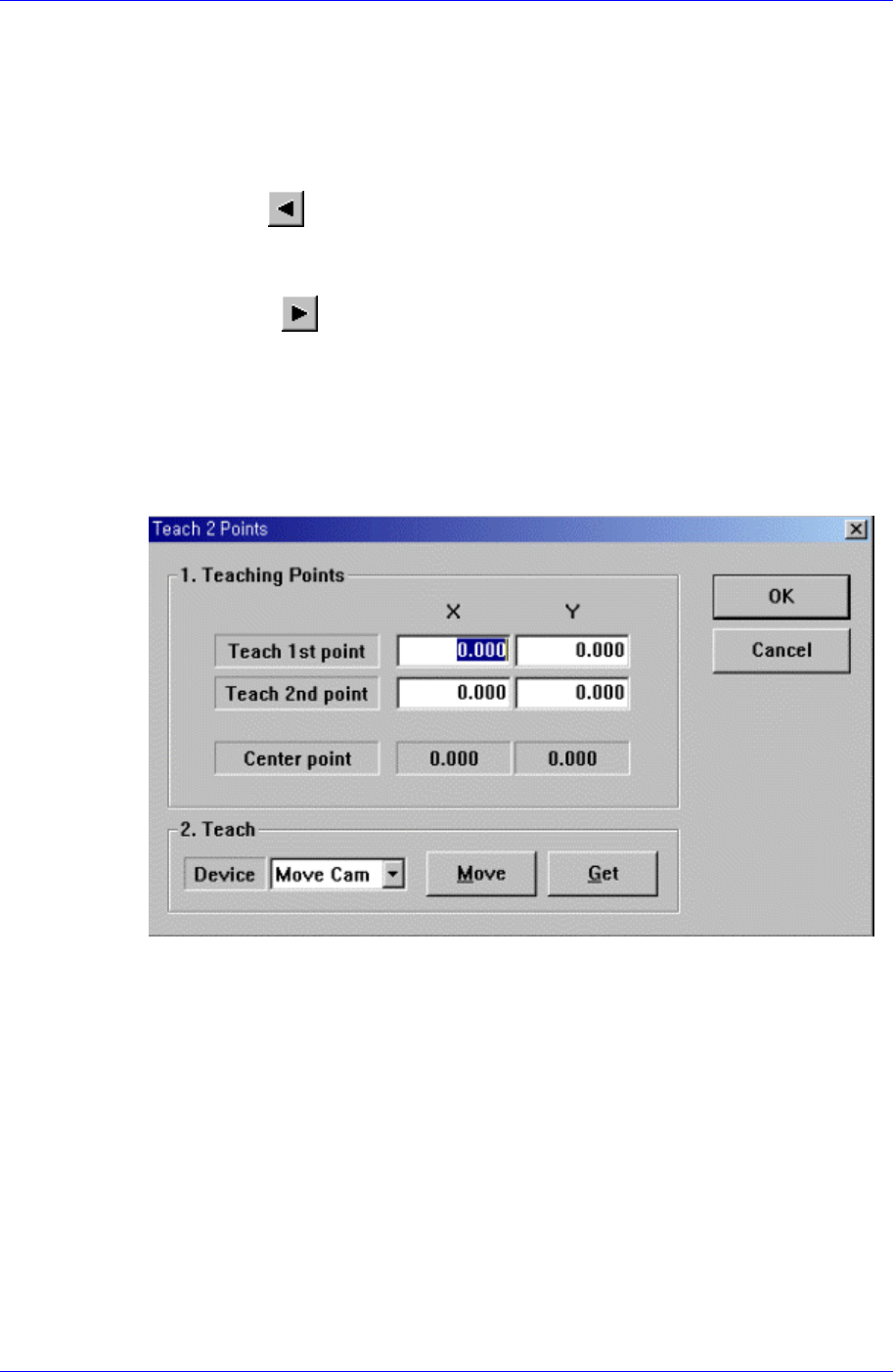
button is clicked on, the following dialog box is displayed.
Figure 8-6. “Feeder : 2 point Teaching in the Stick Unit” dialog box
<1. Teaching Points> group
Set the positions of two corner points to find the center point.
Teach 1st point: Set the position of the first point.
Teach 2nd point: Set the position of the second point.
Center point: Finds and displays the center point from two corner points.
<2. Teach> group
Used to move the head assembly or spindle to the set position by rotating the
shafts of the X, Y-axes driving motors or to obtain the current shaft locations of
the X, Y-axes driving motors.
<Device> combo box
Used to select the corresponding device when moving the head assembly by
rotating the shafts of the X, Y-axes driving motors or to obtain the current
8-10

Feeder Setup
8-11
coordinate of the device to be selected. Available devices are as follows;
Move Cam: Selects teaching camera.
Head1: Selects Head1.
Head2: Selects Head2.
Head3: Selects Head3.
Head4: Selects Head4.
Head5: Selects Head5.
Head6: Selects Head6.
Beam: Selects Beam.
<Move> button
Moves the head assembly by rotating the shafts of the X, Y and Z-axes driving
motors using the device selected from the <Device> combo box. Before
executing “Move”, the edit box corresponding to the desired position must be
clicked on.
<Get> button
Reads in the current position of the XY axis of the device selected in <Device>.
Before executing “Get”, the edit box corresponding to the desired position must
be clicked on.
<OK> button
Sets the obtained center point as the new pickups point and closes the dialog box.
<Cancel> button
Ignores the obtained center point and closes the dialog box.
<Device> combo box
Selects the corresponding device to move the head assembly by rotating the driving
shafts of the X, Y-axes motors, move or rotate the spindle or obtain the current
coordinate of the device to be selected. Available devices are as follows;
Move Cam: Selects Teaching Camera.
Head1: Selects Head1.
Head2: Selects Head2.
Head3: Selects Head3.
Head4: Selects Head4.
Head5: Selects Head5.
Head6: Selects Head6.
Beam: Selects Beam.
<Move> button
Moves the head assembly by rotating the shafts of the X, Y-axes driving motors using
the device selected from the <Device> combo box. Before executing “Move”, the cell
in the grid corresponding to the desired position must be clicked on.
<Get> button
Reads in the current position of the XY axis of the device selected in <Device>.
Before executing “Get”, the cell in the grid corresponding to the desired position must
be clicked on.
<Install to Feeder Base> group