Administrator’s Guide(CP45FV) Eng.pdf - 第278页
Samsung Component Placer CP45FV Administrator ’ Guide Head5: Selects Head5. Head6: Selects Head6. Beam: Selects Beam. <Move> button Moves the head assembly by rotating the shafts of the X, Y and Z-axes driv…
System Setup
16-11
2. Measure the conveyor width (distance between conveyor frames) accurately
using the measuring device and enter the value in the <Initial Width> edit
box.
3. Click the <Update> button to reflect the changed value.
4. In the Board dialog box, measure the Y value of the PCB to be tested using
the measuring device and enter the value in the <Board Size> group. Then
click the <Conv. Width> button to adjust the conveyor width with the Y
value entered.
Check if there is any foreign matter inside the conveyor, and remove it.
5. Click the <PCB In> and <PCB Out> buttons to check if the test PCB is
conveyed to the placement position and can get out of the conveyor normally.
If there is any problem, perform reset from the start.
6. The default value is used for Width Margin. However, the user may change
the value. In this machine the gap between the conveyor and conveyor belt is
approximately 2mm. Therefore, in case 1mm is entered for the width margin,
the set PCB may stand up.
<Initial Width> Edit box
Sets the initial value of the conveyor width when adjusting the conveyor
width automatically.
<Width Margin> Edit box
Sets the tolerance of the conveyor width.
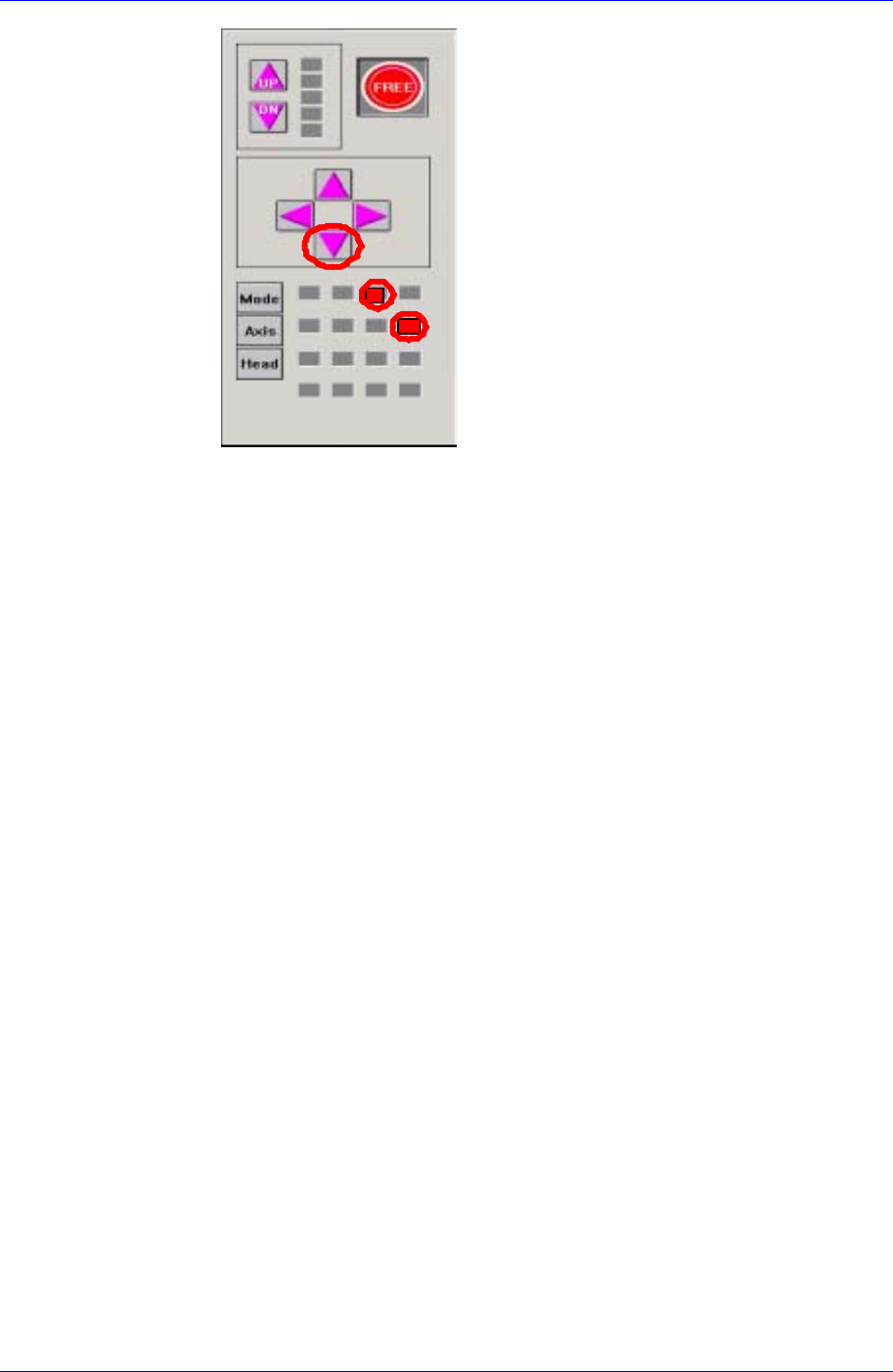
<Device> combo box
Selects the corresponding device to move the head assembly by rotating the driving
shafts of the X, Y and Z-axes motors, move or rotate the spindle or obtain the current
coordinate of the device to be selected. Available devices are as follows;
Move Cam: Selects Teaching Camera.
Head1: Selects Head1.
Head2: Selects Head2.
Head3: Selects Head3.
Head4: Selects Head4.
Samsung Component Placer CP45FV Administrator’ Guide
Head5: Selects Head5.
Head6: Selects Head6.
Beam: Selects Beam.
<Move> button
Moves the head assembly by rotating the shafts of the X, Y and Z-axes driving
motors using the device selected from the <Device> combo box. At this time, the edit
box corresponding to the position to move to must be clicked on with a mouse.
<Get> button
Reads in the current position of the XY and Z axes of the device selected in <Device>.
At this time, the edit box corresponding to the position to be read must be clicked on
with a mouse.
<Update> button
Transmits the set data to the machine and closes the dialog box.
<Cancel> button
Ignores the set data and closes the dialog box.
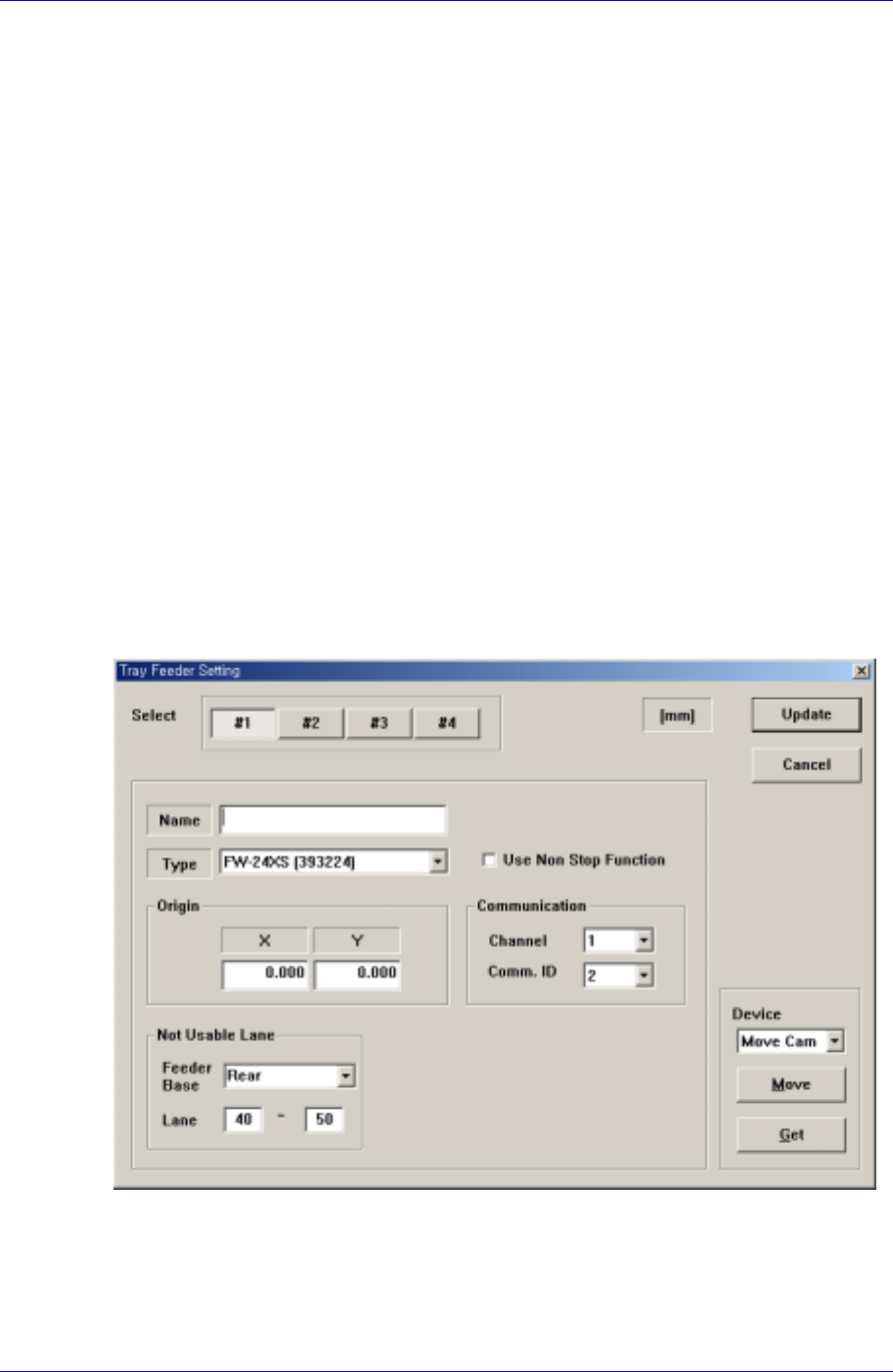
16.5. Tray [F6]
Sets the data on the tray feeder.
When this button is selected, the following dialog box is displayed.
Figure 16-7. “Sys. Setup : Tray Feeder Setting” dialog box
<Select> option button
Select the tray feeder unit. Available tray feeder units are 1 – 4.
That is, a total of four tray feeders can be installed. (For Auto Tray, up to 2 sets of
tray feeders can be installed.)
16-12
System Setup
16-13
<Name> edit box
Set the name of the selected tray feeder unit.
<Type> combo box
Select the type of the set tray feeder unit. Available types are as follows.
Single Tray: Tray to be installed on the feeder base.
FW-20F: Tray consists of 20 step Palette, it communicates with the machine through
RS-232C.
FW-20S: Tray consists of 20 step Palette, it communicates with the machine though
RS-232C.
NONE: Means no tray is installed.
<Use Non Stop Function> check box
This will be activated if the FW-24XS Tray Feeder is selected from the <Type>
combo-box. Put a tick mark to use the ‘Non stop’ function.
<Origin> group
Set the origin of the selected tray feeder unit. This origin is the offset value from the
machine origin. It sets the left or right point as shown in the following figure.
Set the Tray Feeder Origin as follows;
1. In case the origin is not set after the Auto Tray is installed, since the tray
coordinate of the existing program changes when the tray is inserted again after
removal, its teaching must be performed again.
If the teaching of the origin is performed after the tray feeder has been installed
initially, the pickup point coordinate of the existing feeder need not be changed
individually if the coordinate of the initial teaching is reset as origin when the
tray is inserted again after removal.
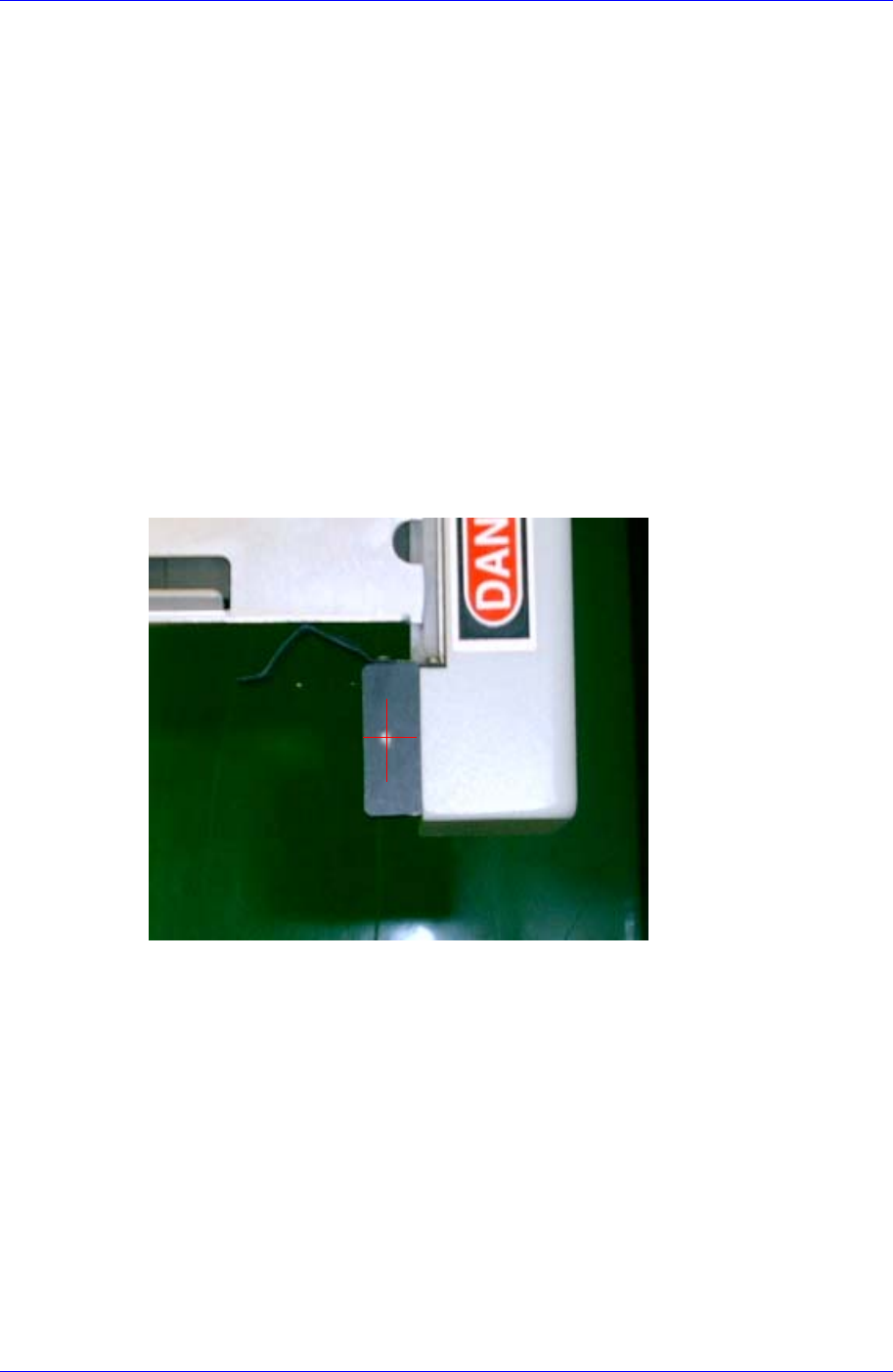
2. In order to move the Move Camera (Fiducial Camera) to the origin of the tray,
select “Move Cam” in the <Device> combo box and click the <Move> button.
3. Using the teaching box, align the set point on the tray on the cross hair center of
the Move Camera (Fiducial Camera) shown on the vision monitor accurately.
4. Select the <Origin> group using the mouse and click the <Get> button to enter
the current coordinate in the <Origin> group.