sh030106u.pdf - 第131页
4. STA RTUP 4 - 6 (b) 24 V DC or higher v oltage i s not appl ied to the pins of the CN 3 connec tor. (c) Plate and DOCO M of the CN3 c onnector is not s horted . Servo amplifier DOCOM Plate CN3 4.1.3 Surr ound ing envir…
4. STARTUP
4 - 5
2) 400 V class
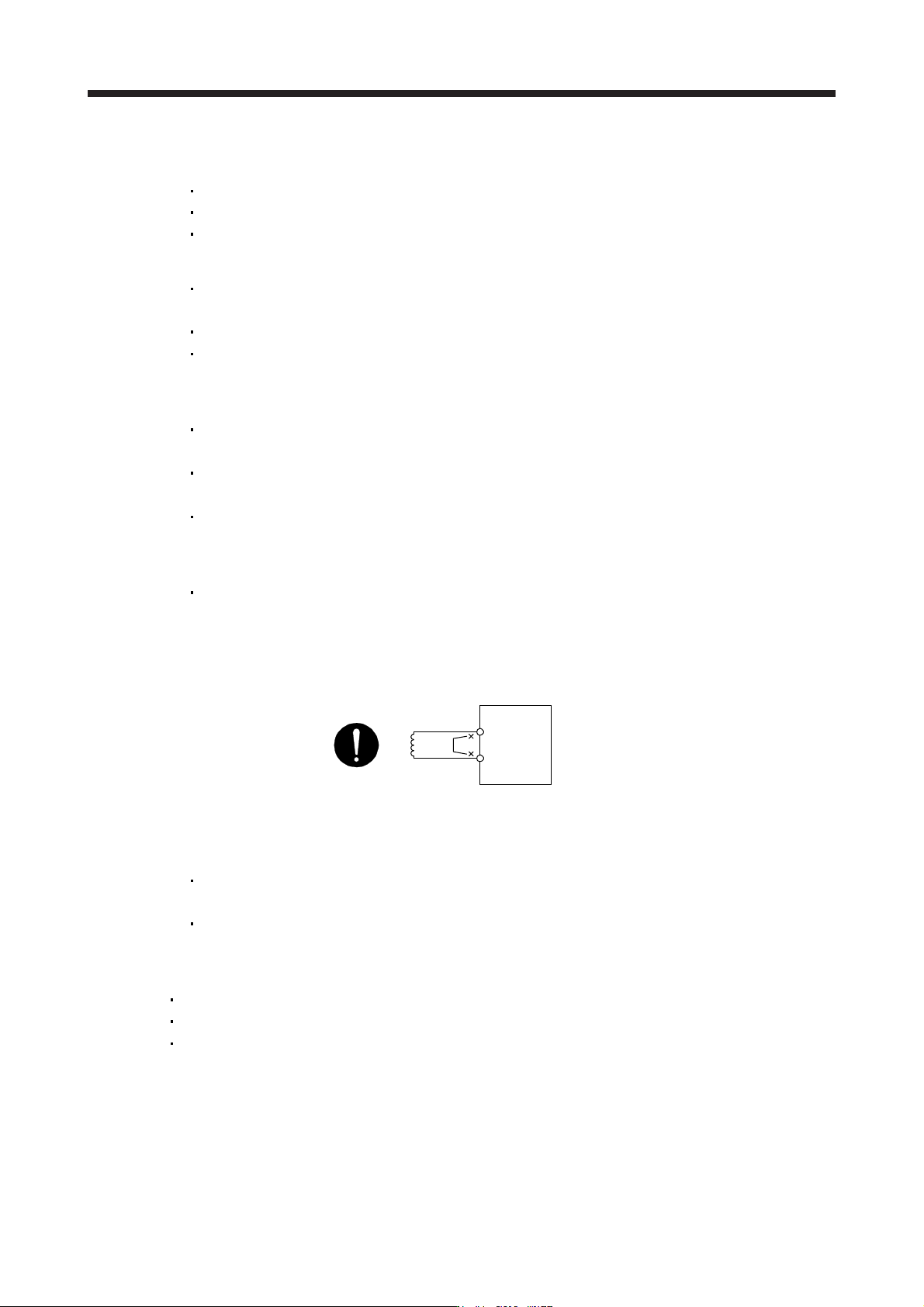
a) When you use a regenerative option for 3.5 kW or less servo amplifiers
The lead wire between P+ terminal and D terminal should not be connected.
The regenerative option should be connected to P+ terminal and C terminal.
Twisted wires cable should be used. (Refer to section 11.2.4.)
b) When you use a regenerative option for 5 kW or more servo amplifiers
For 5 kW or 7 kW servo amplifiers, the lead wire of the built-in regenerative resistor
connected to P+ terminal and C terminal should not be connected.
The regenerative option should be connected to P+ terminal and C terminal.
Twisted wires cable should be used. (Refer to section 11.2.4.)
c) When you use a brake unit and power regeneration converter for 5 kW or more servo
amplifiers
For 5 kW or 7 kW servo amplifiers, the lead wire of the built-in regenerative resistor
connected to P+ terminal and C terminal should not be connected.
Brake unit, power regeneration converter should be connected to P+ terminal and N-
terminal. (Refer to section 11.3 and 11.4.)
Twisted wires cable should be used when wiring is over 5 m and equal to or less than 10 m
using a brake unit. (Refer to section 11.3)
d) When you use a power regeneration common converter
Power regeneration common converter should be connected to P4 terminal and N- terminal.
(Refer to section 11.5.)
e) The power factor improving DC reactor should be connected between P3 and P4. (Refer to
section 11.11.)
(Note)
Power factor improving
DC reactor
Servo amplifier
P3
P4
Note.
A
lwa
y
s disconnect between P3 and P4.
f) When you use a multifunction regeneration converter
For 5 kW or 7 kW servo amplifiers, the lead wire of the built-in regenerative resistor
connected to the P+ terminal and C terminal should be connected. (factory-wired)
The wire of the multifunction regeneration converter should be connected to the P4 terminal
and N- terminal. (Refer to section 11.19.)
3) 100 V class
The lead wire between P+ terminal and D terminal should not be connected.
The regenerative option should be connected to P+ terminal and C terminal.
Twisted wires cable should be used. (Refer to section 11.2.4.)
(2) I/O signal wiring
(a) The I/O signals should be connected correctly.
Use DO forced output to forcibly turn on/off the pins of the CN3 connector. You can use this function
to check the wiring. In this case, switch on the control circuit power supply only.
Refer to section 3.2 for details of I/O signal connection.
4. STARTUP
4 - 6
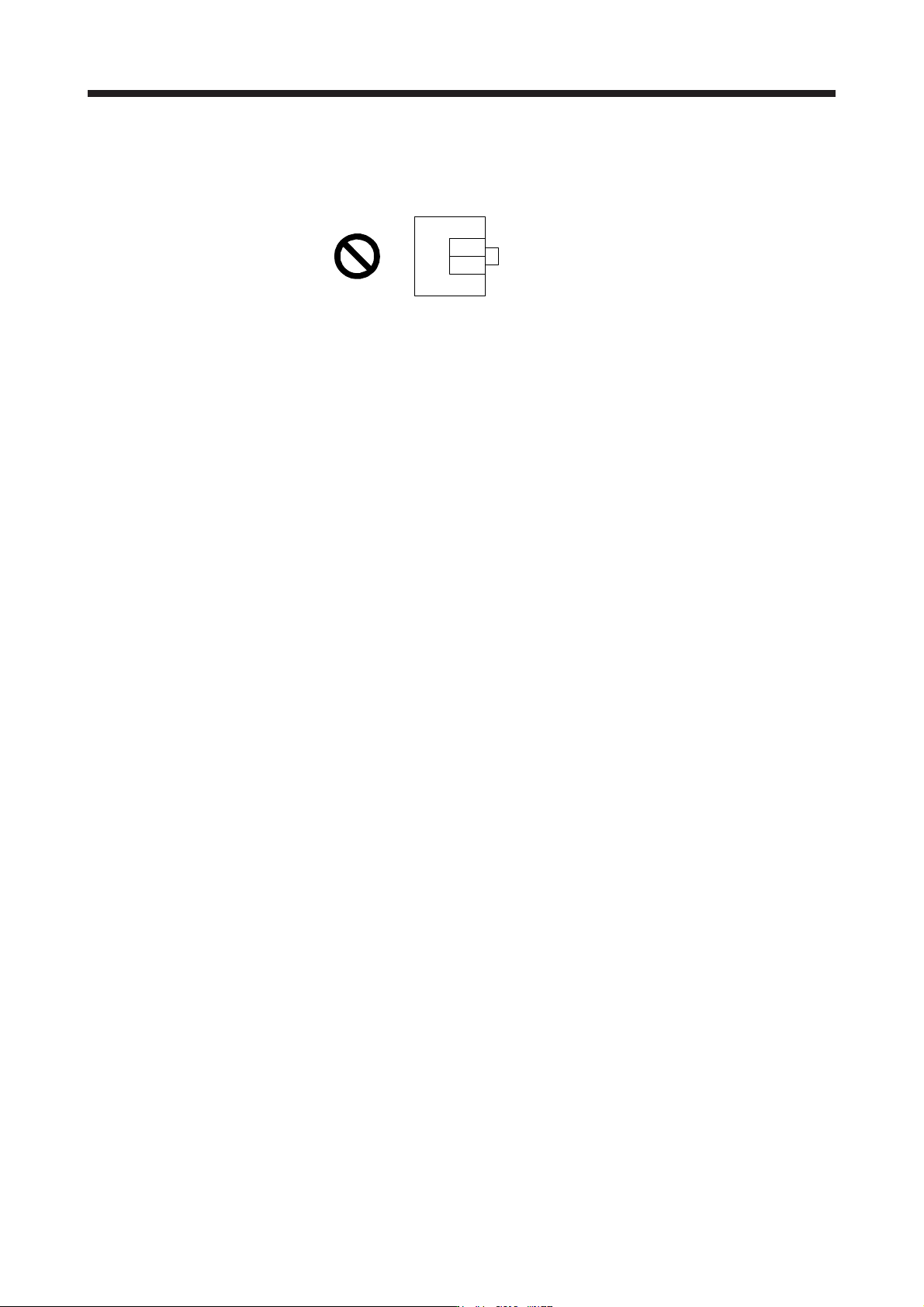
(b) 24 V DC or higher voltage is not applied to the pins of the CN3 connector.
(c) Plate and DOCOM of the CN3 connector is not shorted.
Servo amplifier
DOCOM
Plate
CN3
4.1.3 Surrounding environment
(1) Cable routing
(a) The wiring cables should not be stressed.
(b) The encoder cable should not be used in excess of its bending life. (Refer to section 10.4.)
(c) The connector of the servo motor should not be stressed.
(2) Environment
Signal cables and power cables are not shorted by wire offcuts, metallic dust or the like.
4.2 Startup
Connect the servo motor with a machine after confirming that the servo motor operates properly alone.
(1) Power on
When the main and control circuit power supplies are turned on, "b01" (for the first axis) appears on the
servo amplifier display.
When the absolute position detection system is used in a rotary servo motor, first power-on results in
[AL. 25 Absolute position erased] and the servo-on cannot be ready. The alarm can be deactivated by
then switching power off once and on again.
Also, if power is switched on at the servo motor speed of 3000 r/min or higher, position mismatch may
occur due to external force or the like. Power must therefore be switched on when the servo motor is at
a stop.
4. STARTUP
4 - 7
(2) Parameter setting
POINT
The following encoder cables are of four-wire type. When using any of these
encoder cables, set [Pr. PC04] to "1 _ _ _" to select the four-wire type. Incorrect
setting will result in [AL. 16 Encoder initial communication error 1].
MR-EKCBL30M-L
MR-EKCBL30M-H
MR-EKCBL40M-H
MR-EKCBL50M-H
If using the MR-J4-_B-RJ servo amplifier with the DC power supply input, set
[Pr. PC20] to "_ _ _1".
Set the parameters according to the structure and specifications of the machine. Refer to chapter 5 for
details.
After setting the above parameters, turn power off as necessary. Then switch power on again to enable
the parameter values.
(3) Servo-on
Enable the servo-on with the following procedure.
(a) Switch on main circuit power supply and control circuit power supply.
(b) Transmit the servo-on command with the servo system controller.
When the servo-on status is enabled, the servo amplifier is ready to operate and the servo motor is
locked.
(4) Home position return
Always perform home position return before starting positioning operation.
(5) Stop
Turn off the servo-on command after the servo motor has stopped, and then switch the power off.
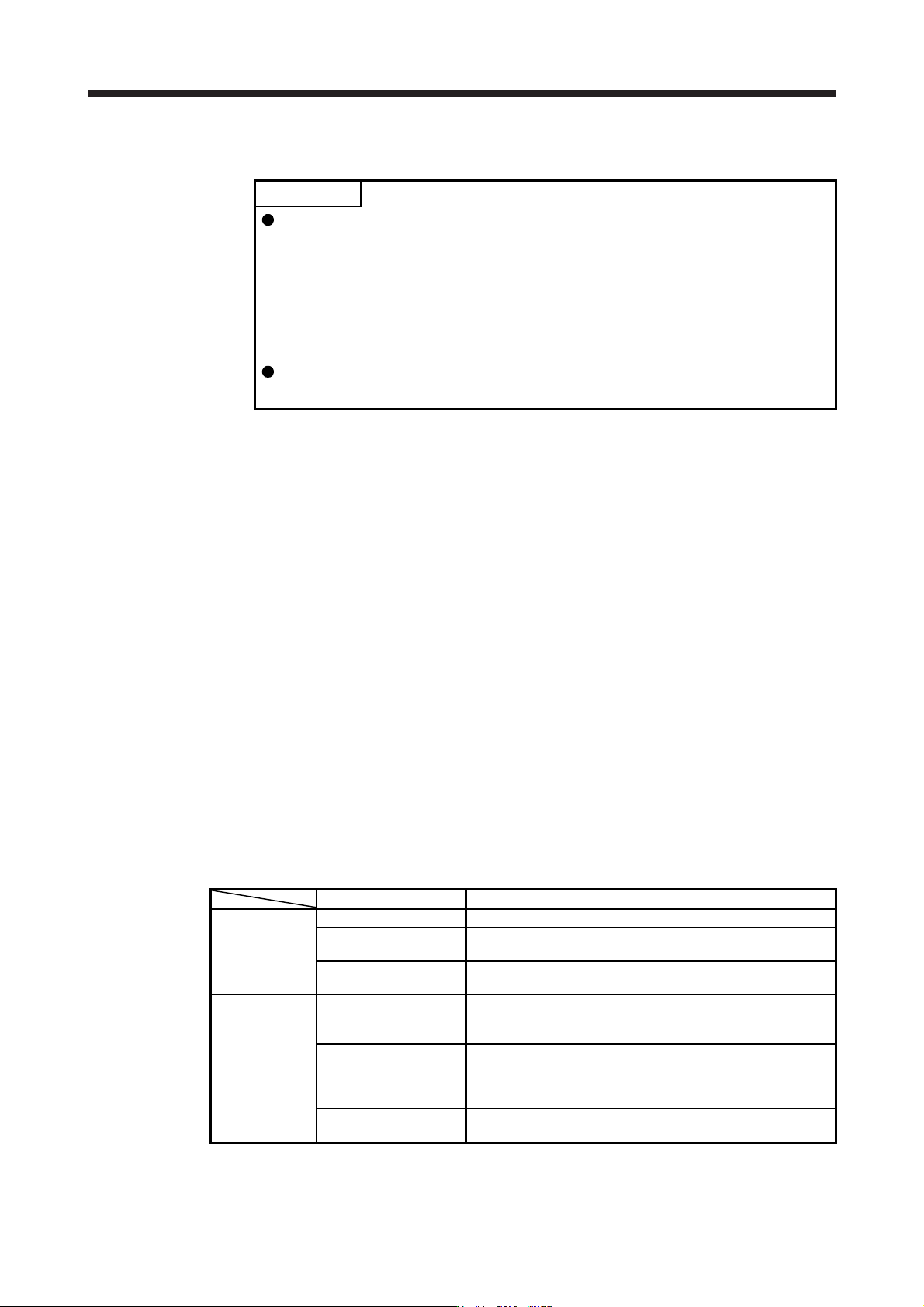
If any of the following situations occurs, the servo amplifier suspends the running of the servo motor and
brings it to a stop.
Refer to section 3.10 for the servo motor with an electromagnetic brake.
Operation/command Stopping condition
Servo system
controller
Servo-off command The base circuit is shut off and the servo motor coasts.
Ready-off command
The base circuit is shut off and the dynamic brake operates to
bring the servo motor to a stop.
Forced stop command
The servo motor decelerates to a stop with the command. [AL.
E7 Controller forced stop warning] occurs.
Servo amplifier
Alarm occurrence
The servo motor decelerates to a stop with the command. With
some alarms, however, the dynamic brake operates to bring the
servo motor to a stop. (Refer to section 8. (Note))
EM2 (Forced stop 2) off
The servo motor decelerates to a stop with the command. [AL.
E6 Servo forced stop warning] occurs. EM2 has the same
function as EM1 in the torque control mode. Refer to section 3.5
for EM1.
STO (STO1, STO2) off
The base circuit is shut off and the dynamic brake operates to
bring the servo motor to a stop.
Note. Only a list of alarms and warnings is listed in chapter 8. Refer to "MELSERVO-J4 Servo Amplifier
Instruction Manual
(
Troubleshootin
g)
" for details of alarms and warnin
g
s.