sh030106u.pdf - 第268页
8. TRO UBLESHO OTING 8 - 1 8. TROUBLESHOOTIN G POINT Refer to " MELSERVO -J4 Servo Am plifi er Instruc tion M anual ( Troub leshoot ing)" for detai ls of alar ms and war nings. As soon as an alar m occ urs , ma…
7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 38
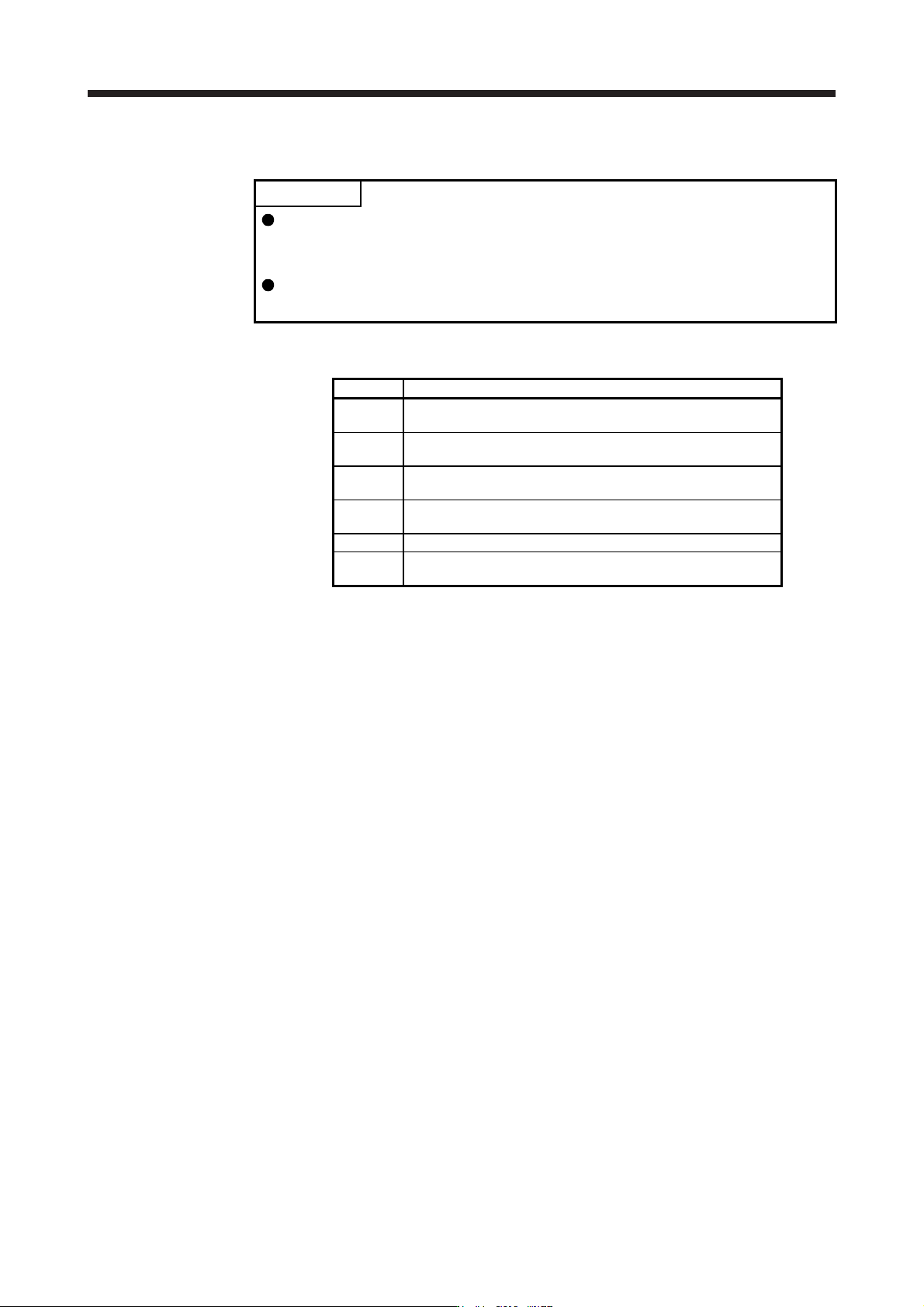
(2) Adjustment procedure
POINT
In the super trace control, droop pulses are near 0 during the servo motor
control. Thus, the normal INP (In-position) may always be turned on. Be sure to
set "INP (In-position) on condition selection" in [Pr. PD13] to " _ 1 _ _".
When you use the super trace control, it is recommended that the acceleration
time constant up to the rated speed be set to 1 s or more.
The following shows the adjustment procedure.
Step Operation
1
Execute the gain adjustment with one-touch tuning, auto tuning,
etc. Refer to chapter 6 for details.
2
Change the setting of auto tuning mode to the manual mode ([Pr.
PA08]: _ _ _ 3).
3
Change the setting of feed forward gain ([Pr. PB04]), and adjust
that droop pulses will be 0 at a constant speed.
4
Set the setting of INP (In-position) on condition selection ([Pr.
PD13]) to " _ 1 _ _".
5 Enable the super trace control. ([Pr. PA22]: _ _ 2 _)
6
Change the setting of model loop gain ([Pr. PB07]), and adjust
droop pulses during acceleration/deceleration.
8. TROUBLESHOOTING
8 - 1
8. TROUBLESHOOTING
POINT
Refer to "MELSERVO-J4 Servo Amplifier Instruction Manual (Troubleshooting)"
for details of alarms and warnings.
As soon as an alarm occurs, make the Servo-off status and interrupt the main
circuit power.
[AL. 37 Parameter error] and warnings (except [AL. F0 Tough drive warning]) are
not recorded in the alarm history.
When an error occurs during operation, the corresponding alarm and warning are displayed. When an alarm
or warning is displayed, refer to "MELSERVO-J4 Servo Amplifier Instruction Manual (Troubleshooting)" to
remove the failure. When an alarm occurs, ALM will turn off.
8.1 Explanation for the lists
(1) No./Name/Detail No./Detail name
Indicates each No./Name/Detail No./Detail name of alarms or warnings.
(2) Stop method
For the alarms and warnings in which "SD" is written in the stop method column, the servo motor stops
with the dynamic brake after forced stop deceleration. For the alarms and warnings in which "DB" or
"EDB" is written in the stop method column, the servo motor stops with the dynamic brake without forced
stop deceleration.
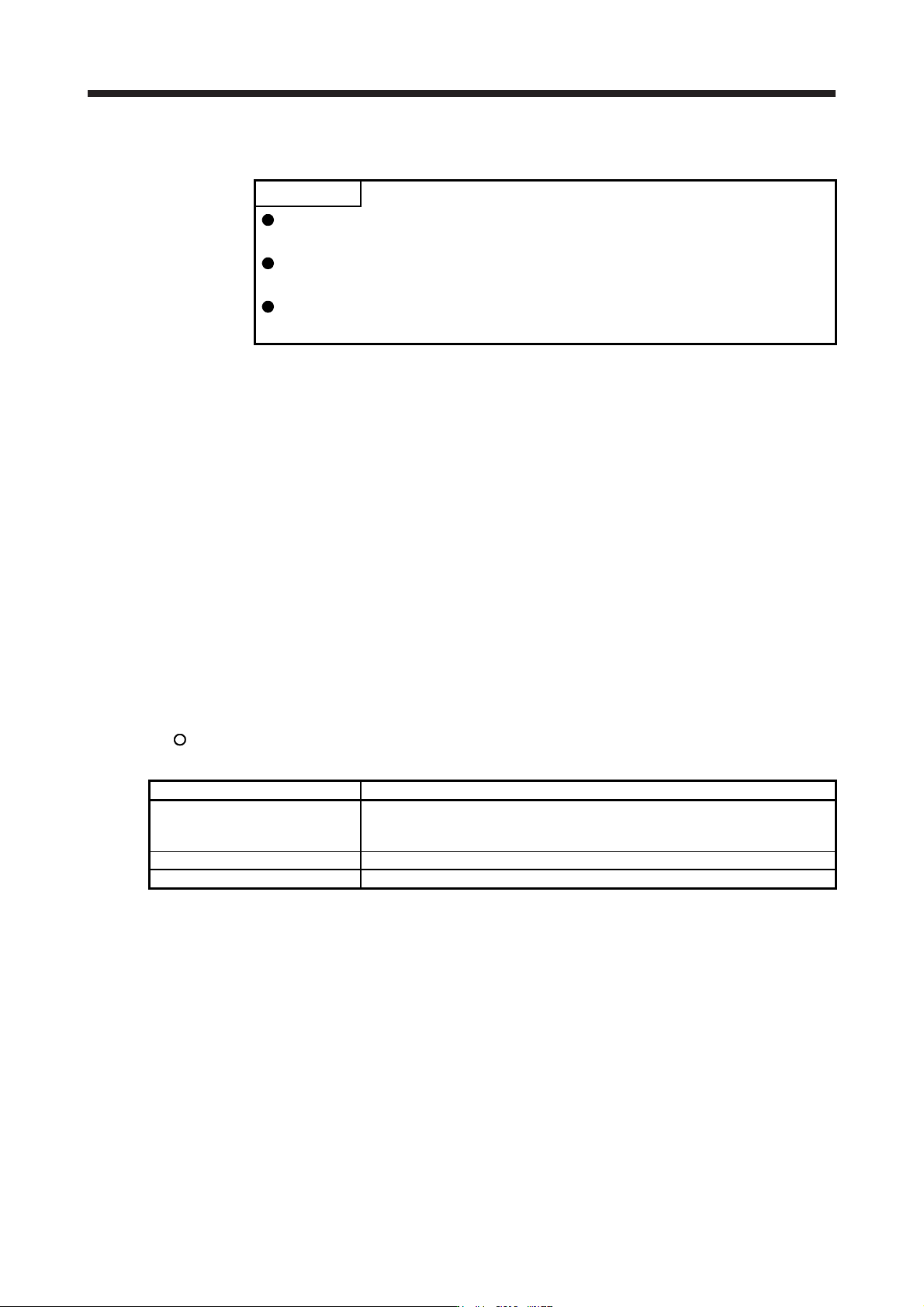
(3) Alarm deactivation
After the cause of the alarm has been removed, the alarm can be deactivated by any of the methods
marked
in the alarm deactivation column. Warnings are automatically canceled after the cause of
occurrence is removed. Alarms are deactivated with alarm reset, CPU reset, or cycling the power.
Alarm deactivation Explanation
Alarm reset 1. Reset command from controller
2. Clicking "Occurred Alarm Reset" in the "Alarm Display" window of MR
Configurator2
CPU reset Resetting the controller itself
Cycling the power Turning the power off and then turning it on again.
8. TROUBLESHOOTING
8 - 2
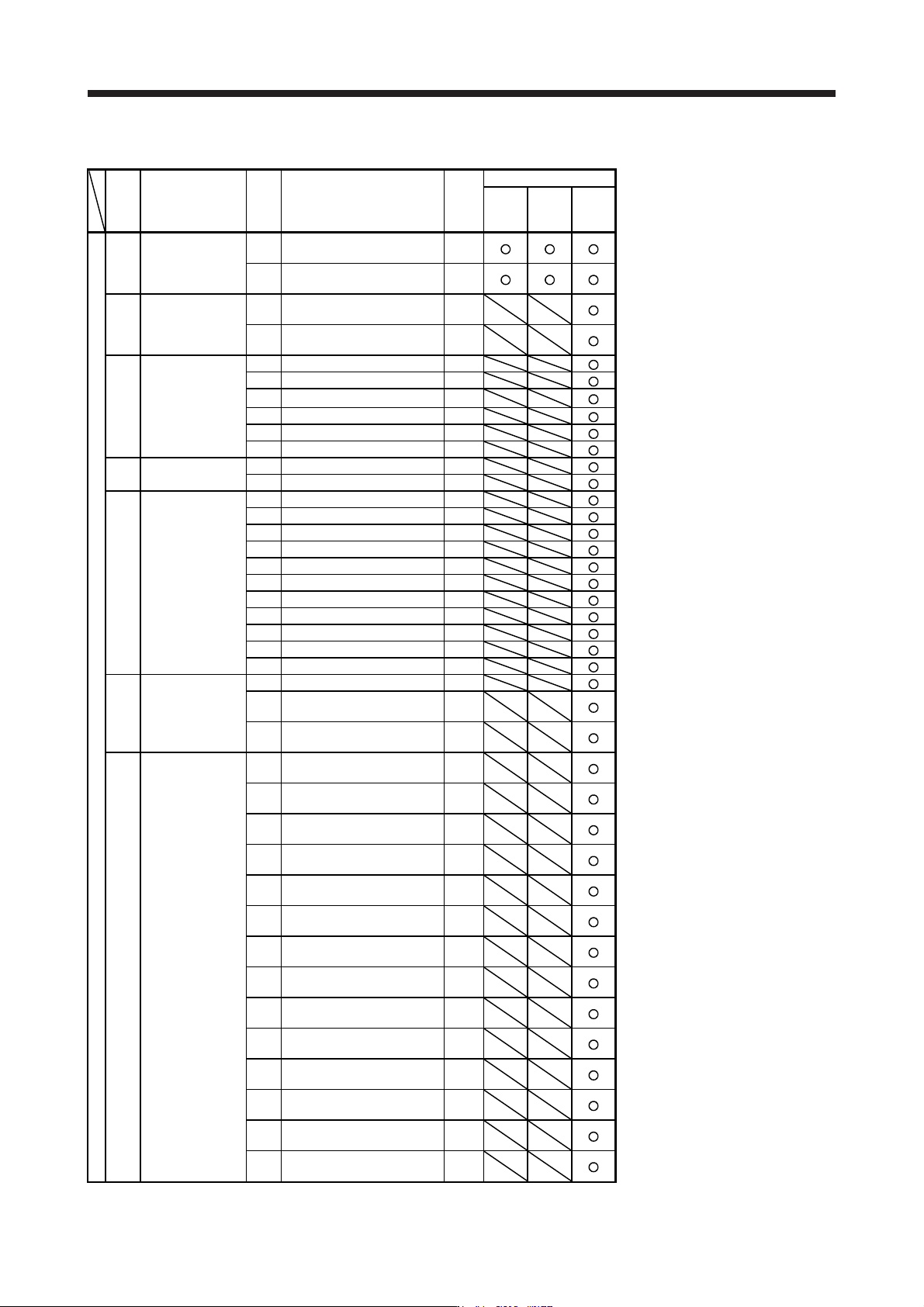
8.2 Alarm list
No. Name
Detail
No.
Detail name
Stop
method
(Note
2, 3)
Alarm deactivation
Alarm
reset
CPU
reset
Cycling
the
power
Alarm
10 Undervoltage
10.1
Voltage drop in the control
circuit power
EDB
10.2
Voltage drop in the main circuit
power
SD
11 Switch setting error
11.1
Axis number setting error/
Station number setting error
DB
11.2
Disabling control axis setting
error
DB
12.1 RAM error 1 DB
12.2 RAM error 2 DB
12
Memory error 1
(RAM)
12.3 RAM error 3 DB
12.4 RAM error 4 DB
12.5 RAM error 5 DB
12.6 RAM error 6 DB
13 Clock error
13.1 Clock error 1 DB
13.2 Clock error 2 DB
14.1 Control process error 1 DB
14.2 Control process error 2 DB
14.3 Control process error 3 DB
14.4 Control process error 4 DB
Control process
error
14.5 Control process error 5 DB
14 14.6 Control process error 6 DB
14.7 Control process error 7 DB
14.8 Control process error 8 DB
14.9 Control process error 9 DB
14.A Control process error 10 DB
14.B Control process error 11 DB
15
Memory error 2
(EEP-ROM)
15.1 EEP-ROM error at power on DB
15.2
EEP-ROM error during
operation
DB
15.4
Home position information read
error
DB
16.1
Encoder initial communication -
Receive data error 1
DB
16.2
Encoder initial communication -
Receive data error 2
DB
16.3
Encoder initial communication -
Receive data error 3
DB
16.4
Encoder initial communication -
Encoder malfunction (Note 6)
DB
16.5
Encoder initial communication -
Transmission data error 1
DB
16.6
Encoder initial communication -
Transmission data error 2
DB
16
Encoder initial
communication
error 1
16.7
Encoder initial communication -
Transmission data error 3
DB
16.8
Encoder initial communication -
Incompatible encoder (Note 6)
DB
16.A
Encoder initial communication -
Process error 1
DB
16.B
Encoder initial communication -
Process error 2
DB
16.C
Encoder initial communication -
Process error 3
DB
16.D
Encoder initial communication -
Process error 4
DB
16.E
Encoder initial communication -
Process error 5
DB
16.F
Encoder initial communication -
Process error 6
DB