sh030106u.pdf - 第26页
1. FUNCTI ONS AND CONF IGURATION 1 - 9 (b) MR-J4-500B4(-RJ)/MR-J4 -700B4(-RJ) Dynamic brake circuit Current detector Virtual motor Virtual encoder L11 L21 Cooling fan Encoder N- C Current detection Overcurrent protection…
1. FUNCTIONS AND CONFIGURATION
1 - 8
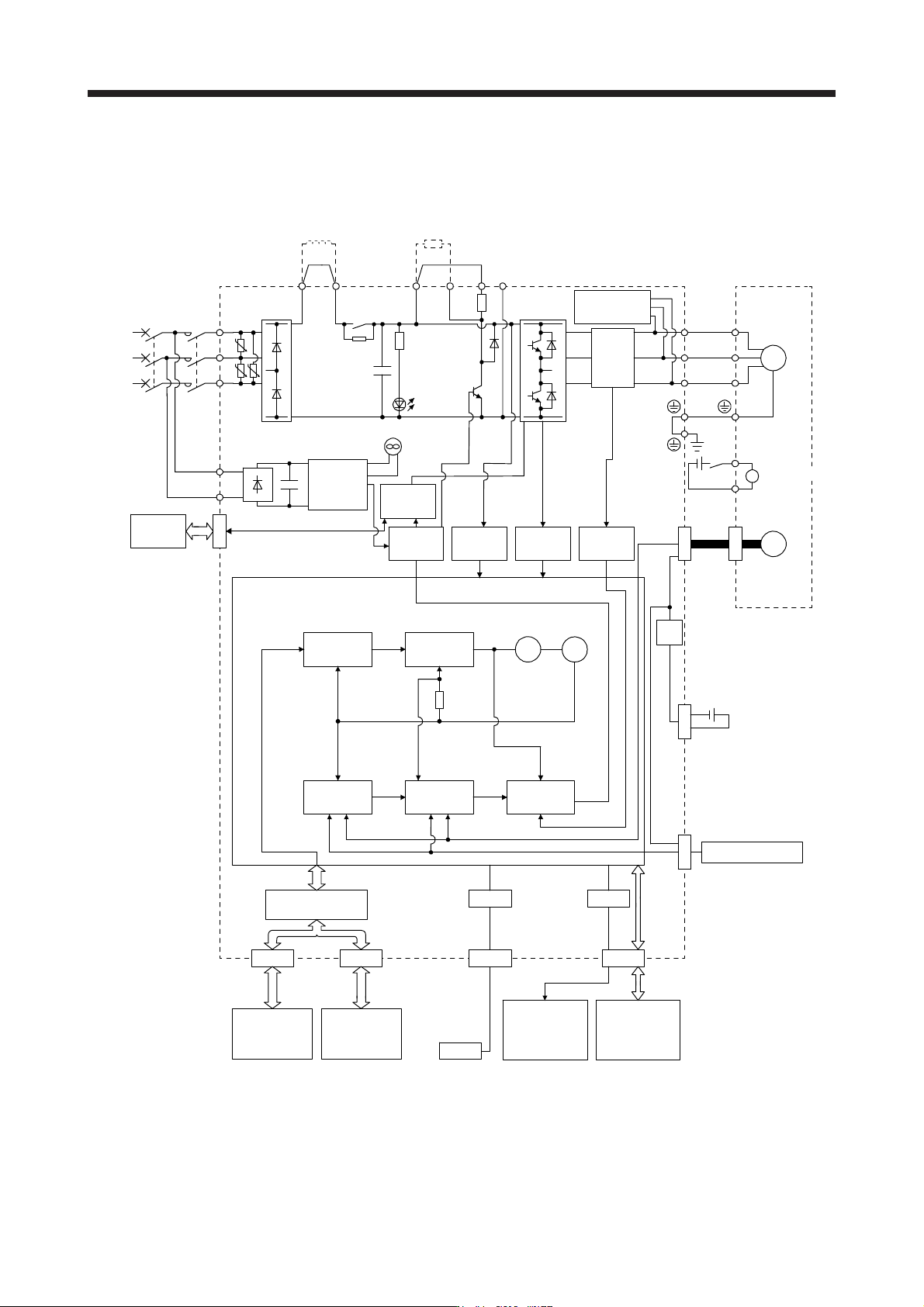
(2) 400 V class
(a) MR-J4-350B4(-RJ) or less
Model position
Current
control
Actual
position
control
Actual
speed
control
Virtual
motor
Virtual
encoder
L11
L21
Cooling fan
(Note 2)
Encoder
N-CD
L3
L2
L1
Dynamic
brake
circuit
Current
detection
Overcurrent
protection
Voltage
detection
(Note 1)
Power
supply
MCMCCB
Base
amplifier
STO
circuit
CN5
USB
USB
Personal
computer
Servo system
controller or
servo amplifier
Servo
amplifier
or cap
CN1A CN1B
D/A
Analog monitor
(2 channels)
Position
command
input
CN3
Servo amplifier
U
V
W
U
V
W
P3 P4 (Note 3)
Diode
stack
Relay
P+
+
+
B
RA
24 V DC
B1
B2
Battery
(For absolute
position detection
system)
CN4
STO
switch
Model speed Model torque
M
CN2
CN8
Control
circuit
power
supply
Model
position
control
Model
speed
control
IF Control
Servo motor
Charge
lamp
Regene-
rative
TR
Current
detector
Digital I/O
control
Regenerative
option
U U
U
Step-
down
circuit
(Note 4)
(Note 5)
Power factor
improving
DC reactor
Electromagnetic
brake
CN2L
External encoder
Note 1. Refer to section 1.3 for the power suppl
y
specification.
2. Servo amplifiers MR-J4-200B4
(
-RJ
)
or more have a coolin
g
fan.
3. MR-J4 servo amplifier has P3 and P4 in the upstream of the inrush current suppression circuit. They are different from P1 and
P2 of MR-J3 servo amplifiers.
4. This is for MR-J4-
_
B4-RJ servo amplifier. MR-J4-
_
B4 servo amplifier does not have CN2L connector.
5. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used.
When not usin
g
the power factor improvin
g
DC reactor, short P3 and P4.
1. FUNCTIONS AND CONFIGURATION
1 - 9
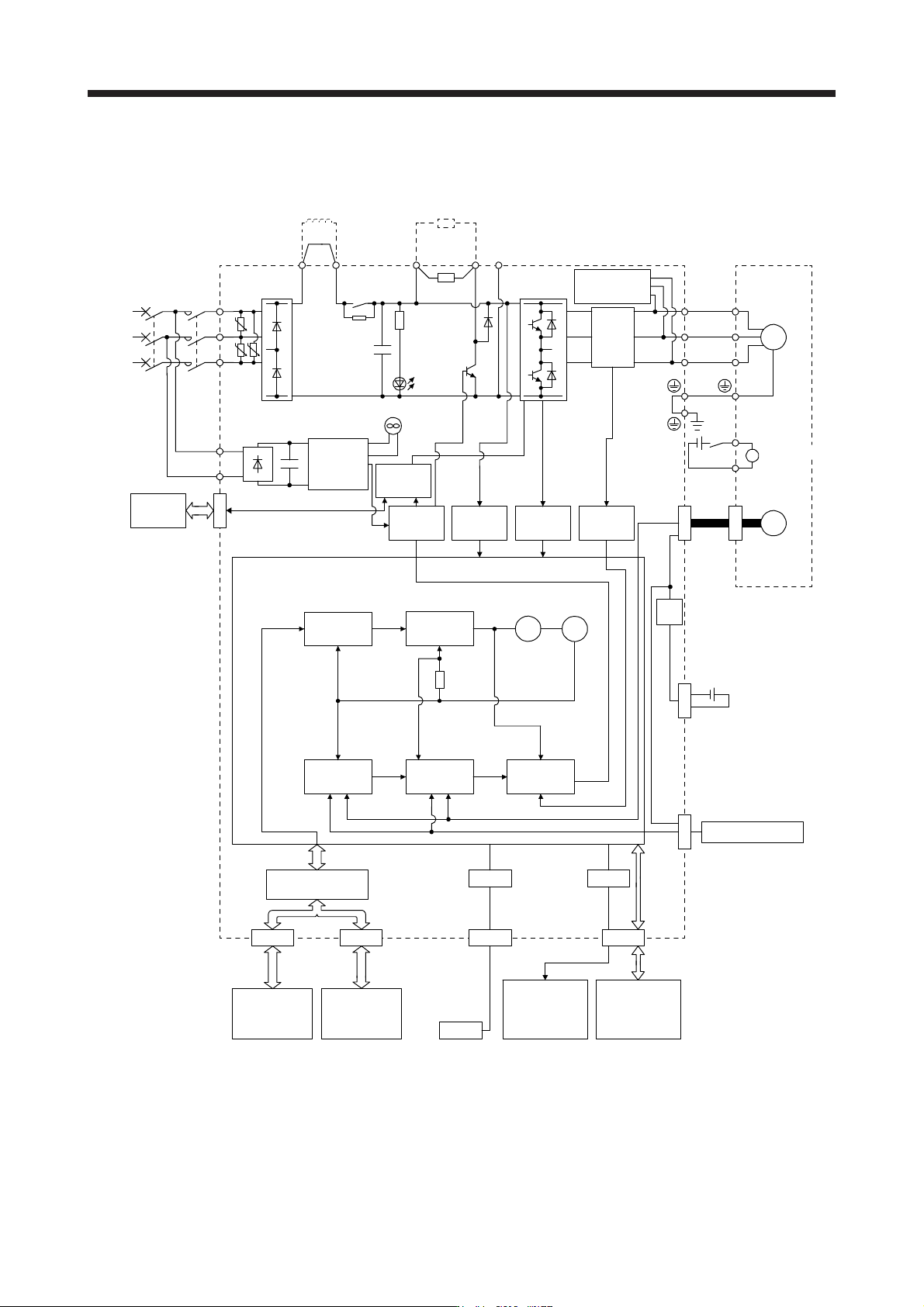
(b) MR-J4-500B4(-RJ)/MR-J4-700B4(-RJ)
Dynamic
brake
circuit
Current
detector
Virtual
motor
Virtual
encoder
L11
L21
Cooling fan
Encoder
N-C
Current
detection
Overcurrent
protection
Voltage
detection
(Note 1)
Power
supply
MCMCCB
Base
amplifier
STO
circuit
CN5
USB
USB
CN1A CN1B
D/A
Position
command
input
CN3
Servo amplifier
Diode
stack
U
V
W
U
V
W
P3 P4 (Note 2)
Relay
P+
+
+
B
RA
24 V DC
B1
B2
Battery
(For absolute
position detection
system)
CN4
STO
switch
M
CN2
CN8
Control
circuit
power
supply
Model
position
control
Model
speed
control
Servo motor
Regenerative
option
L3
L2
L1
U U
U
Step-
down
circuit
(Note 3)
(Note 4)
Power factor
improving
DC reactor
Charge
lamp
Regene-
rative
TR
Electromagnetic
brake
Model position Model speed Model torque
Current
control
Actual
position
control
Actual
speed
control
IF Control
Personal
computer
Servo system
controller or
servo amplifier
Servo
amplifier
or cap
Analog monitor
(2 channels)
Digital I/O
control
CN2L
External encoder
Note 1. Refer to section 1.3 for the power suppl
y
specification.
2. MR-J4 servo amplifier has P3 and P4 in the upstream of the inrush current suppression circuit. They are different from P1 and
P2 of MR-J3 servo amplifiers.
3. This is for MR-J4-
_
B4-RJ servo amplifier. MR-J4-
_
B4 servo amplifier does not have CN2L connector.
4. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used.
When not usin
g
the power factor improvin
g
DC reactor, short P3 and P4.
1. FUNCTIONS AND CONFIGURATION
1 - 10
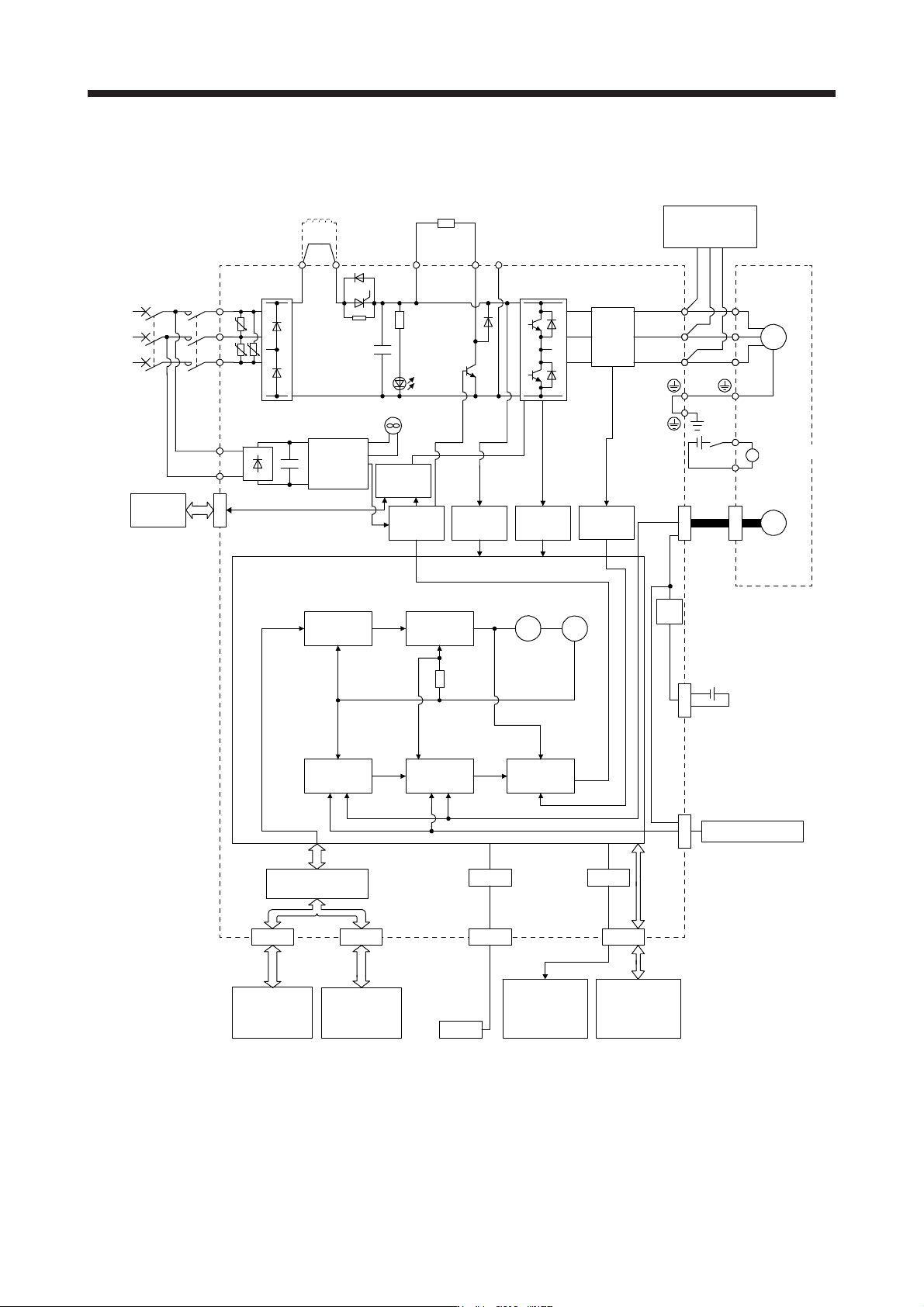
(c) MR-J4-11KB4(-RJ)/MR-J4-15KB4(-RJ)/MR-J4-22KB4(-RJ)
Current
detector
Thyristor
External
dynamic brake
(optional)
U
V
W
U
V
W
L3
L2
L1
U U
U
(Note 3)
(Note 5)
Power factor
improving
DC reactor
Charge
lamp
Regene-
rative
TR
Cooling fan
L11
L21
Encoder
N-C
(Note 1)
Power
supply
MCMCCB
CN5
USB
USB
CN1A CN1B
D/A
CN3
Servo amplifier
Diode
stack
P3 P4 (Note 2)
P+
+
+
B
RA
24 V DC
B1
B2
Battery
(For absolute
position detection
system)
CN4
M
CN2
CN8
Servo motor
(Note 4, 6)
External
regenerative resistor
or
regenerative option
Electromagnetic
brake
STO
switch
Control
circuit
power
supply
Current
detection
Overcurrent
protection
Voltage
detection
Base
amplifier
STO
circuit
Step-
down
circuit
Model position
Current
control
Actual
position
control
Actual
speed
control
Virtual
motor
Virtual
encoder
Position
command
input
Model speed Model torque
Model
position
control
Model
speed
control
Personal
computer
Servo system
controller or
servo amplifier
Servo
amplifier
or cap
Analog monitor
(2 channels)
Digital I/O
control
IF Control
CN2L
External encoder