sh030106u.pdf - 第542页
16. FULLY CLOSE D L OOP SYS TEM 16 - 17 16.3.2 Ho me posit ion r eturn (1) General ins truct ion Home posit ion r eturn is all performe d accor ding to the load- sid e encoder feedbac k data, indep endently of the load- …
16. FULLY CLOSED LOOP SYSTEM
16 - 16
(7) Setting of fully closed loop dual feedback filter
With the initial value (setting = 10) set in [Pr. PE08 Fully closed loop dual feedback filter the dual
feedback filter], make gain adjustment by auto tuning, etc. as in semi closed loop control. While
observing the servo operation waveform with the graph function, etc. of MR Configurator2, adjust the
dual feedback filter.
The dual feedback filter operates as described below depending on the setting.
[Pr. PE08] setting Control mode Vibration Settling time
0 Semi closed loop
1
to
4499
Dual feedback
Not frequently occurs
to
Frequently occurs
Long time
to
Short time
4500 Fully closed loop
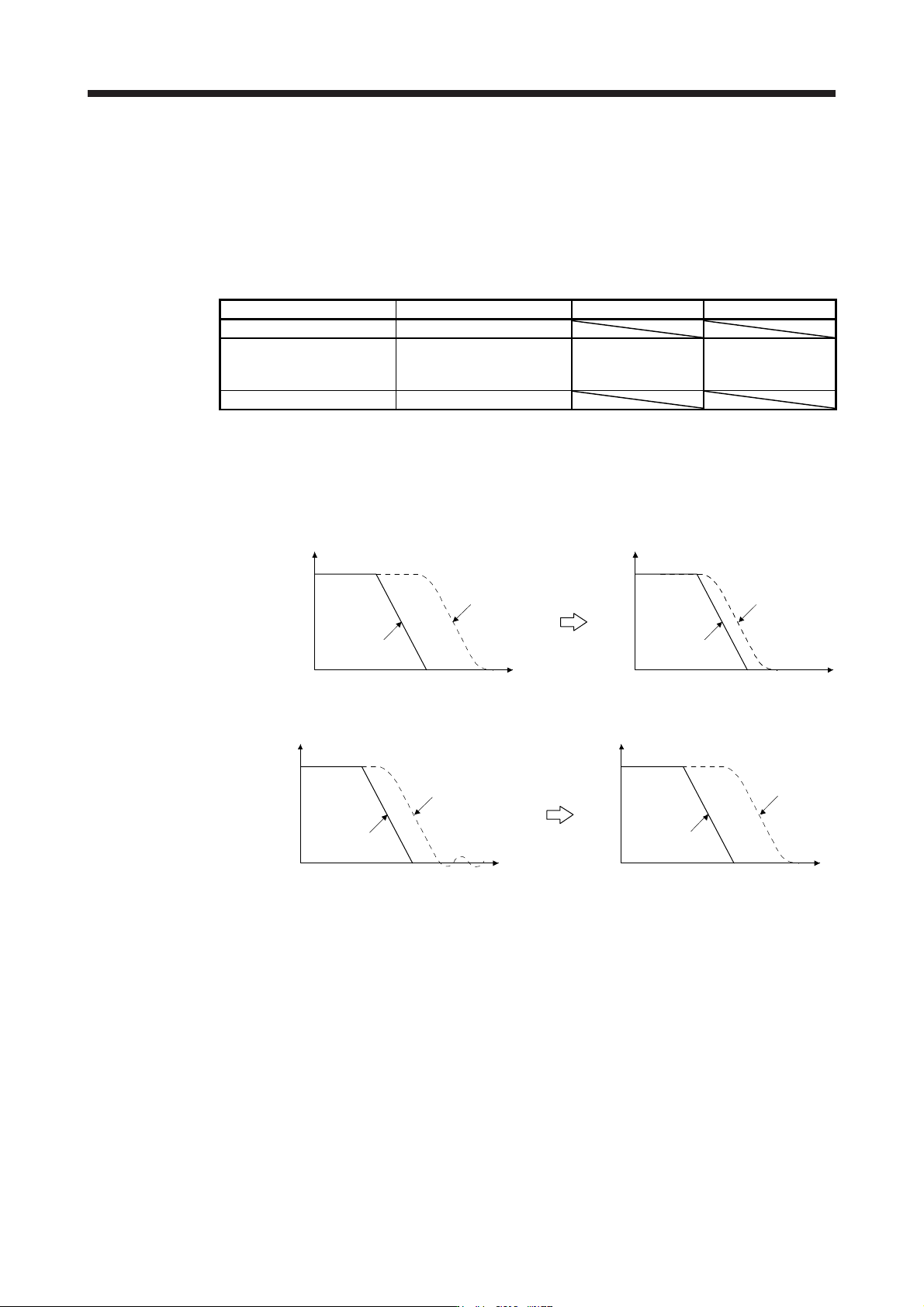
Increasing the dual feedback filter setting shortens the settling time, but increases servo motor vibration
since the motor is more likely to be influenced by the load-side encoder vibration. The maximum setting
of the dual feedback filter should be less than half of the PG2 setting.
Reduction of settling time: Increase the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
TimeTime
Suppression of vibration: Decrease the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
TimeTime
16. FULLY CLOSED LOOP SYSTEM
16 - 17
16.3.2 Home position return
(1) General instruction
Home position return is all performed according to the load-side encoder feedback data, independently
of the load-side encoder type. It is irrelevant to the Z-phase position of the servo motor encoder. In the
case of a home position return using a dog signal, the home position (reference mark) must be passed
through when an incremental type linear encoder is used, or the Z-phase be passed through when a
rotary encoder is used, during a period from a home position return start until the dog signal turns off.
(2) Load-side encoder types and home position return methods
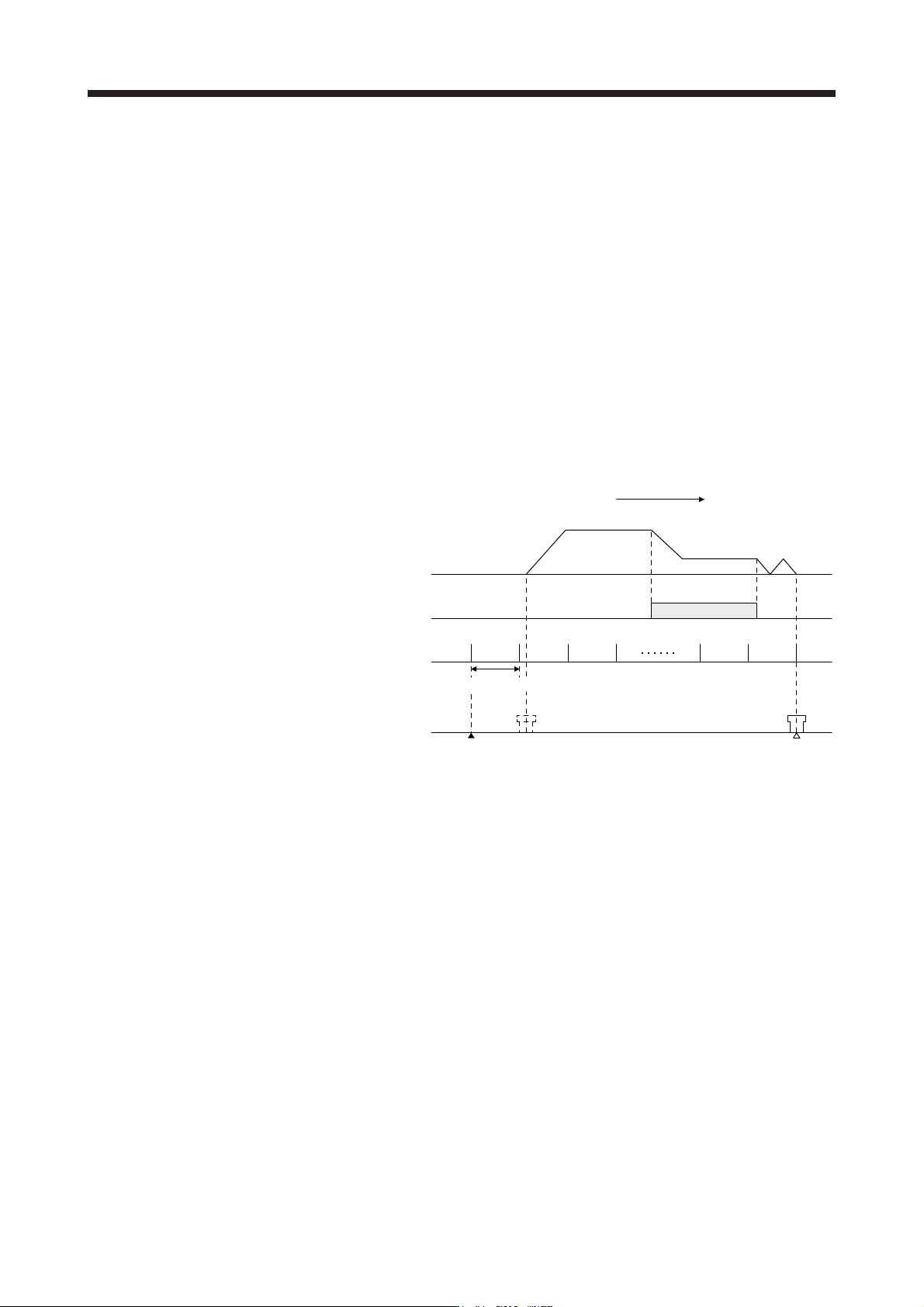
(a) About proximity dog type home position return using absolute type linear encoder
When an absolute type linear encoder is used, the home position reference position is the position
per servo motor revolution to the linear encoder home position (absolute position data = 0).
In the case of a proximity dog type home position return, the nearest position after proximity dog off
is the home position.
The linear encoder home position may be set in any position.
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Servo motor
speed
Reference home
position
Machine position
0 r/min
Equivalent to one servo motor revolution
16. FULLY CLOSED LOOP SYSTEM
16 - 18
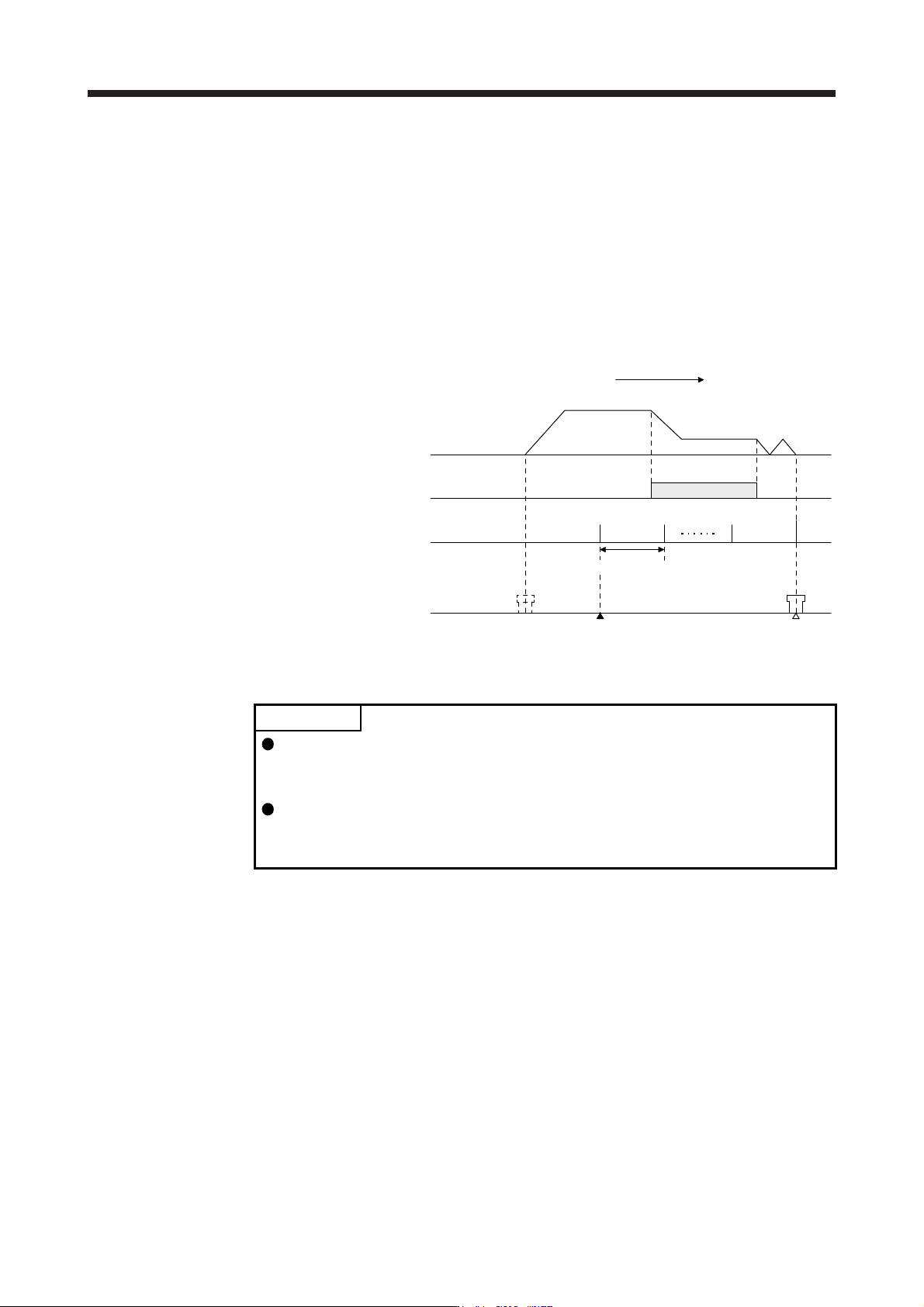
(b) About proximity dog type home position return using incremental linear encoder
1) When the linear encoder home position (reference mark) exists in the home position return
direction
When an incremental linear encoder is used, the home position is the position per servo motor
revolution to the linear encoder home position (reference mark) passed through first after a home
position return start.
In the case of a proximity dog type home position return, the nearest position after proximity dog
off is the home position.
Set one linear encoder home position in the full stroke, and set it in the position that can always
be passed through after a home position return start.
Servo motor
speed
Linear encoder home position Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Reference home
position
Machine position
Equivalent to one servo motor revolution
0 r/min
2) When the linear encoder home position does not exist in the home position return direction
POINT
To execute a home position return securely, start a home position return after
moving the axis to the opposite stroke end by jog operation, etc. of the
controller.
A home position return cannot be made if the incremental linear encoder does
not have a linear encoder home position (reference mark). Always provide a
linear encoder home position (reference mark). (one place in the fully stroke)