sh030106u.pdf - 第172页
5. PARAMETE RS 5 - 27 No. Sym bol Name and function Initial value [unit] Setting range PB24 *MVS Slight vibrat ion suppression c ontrol Select the s light vibrat ion suppressi on control and PI -PID swit chi ng control. …
5. PARAMETERS
5 - 26
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PB19 VRF11 Vibration suppression control 1 - Vibration frequency
Set the vibration frequency for vibration suppression control 1 to suppress low-frequency
machine vibration.
When "Vibration suppression control 1 tuning mode selection" is set to "Automatic setting (_ _
_ 1)" in [Pr. PB02], this parameter will be set automatically. When "Manual setting (_ _ _ 2)" is
selected, the setting written to the parameter is used. The setting range of this parameter
varies, depending on the value in [Pr. PB07]. If a value out of the range is set, the vibration
suppression control will be disabled. Refer to section 7.1.5 for details.
100.0
[Hz]
0.1
to
300.0
PB20 VRF12 Vibration suppression control 1 - Resonance frequency
Set the resonance frequency for vibration suppression control 1 to suppress low-frequency
machine vibration.
When "Vibration suppression control 1 tuning mode selection" is set to "Automatic setting (_ _
_ 1)" in [Pr. PB02], this parameter will be set automatically. When "Manual setting (_ _ _ 2)" is
selected, the setting written to the parameter is used. The setting range of this parameter
varies, depending on the value in [Pr. PB07]. If a value out of the range is set, the vibration
suppression control will be disabled. Refer to section 7.1.5 for details.
100.0
[Hz]
0.1
to
300.0
PB21 VRF13 Vibration suppression control 1 - Vibration frequency damping
Set a damping of the vibration frequency for vibration suppression control 1 to suppress low-
frequency machine vibration.
When "Vibration suppression control 1 tuning mode selection" is set to "Automatic setting (_ _
_ 1)" in [Pr. PB02], this parameter will be set automatically. When "Manual setting (_ _ _ 2)" is
selected, the setting written to the parameter is used. Refer to section 7.1.5 for details.
0.00 0.00
to
0.30
PB22 VRF14 Vibration suppression control 1 - Resonance frequency damping
Set a damping of the resonance frequency for vibration suppression control 1 to suppress low-
frequency machine vibration.
When "Vibration suppression control 1 tuning mode selection" is set to "Automatic setting (_ _
_ 1)" in [Pr. PB02], this parameter will be set automatically. When "Manual setting (_ _ _ 2)" is
selected, the setting written to the parameter is used. Refer to section 7.1.5 for details.
0.00 0.00
to
0.30
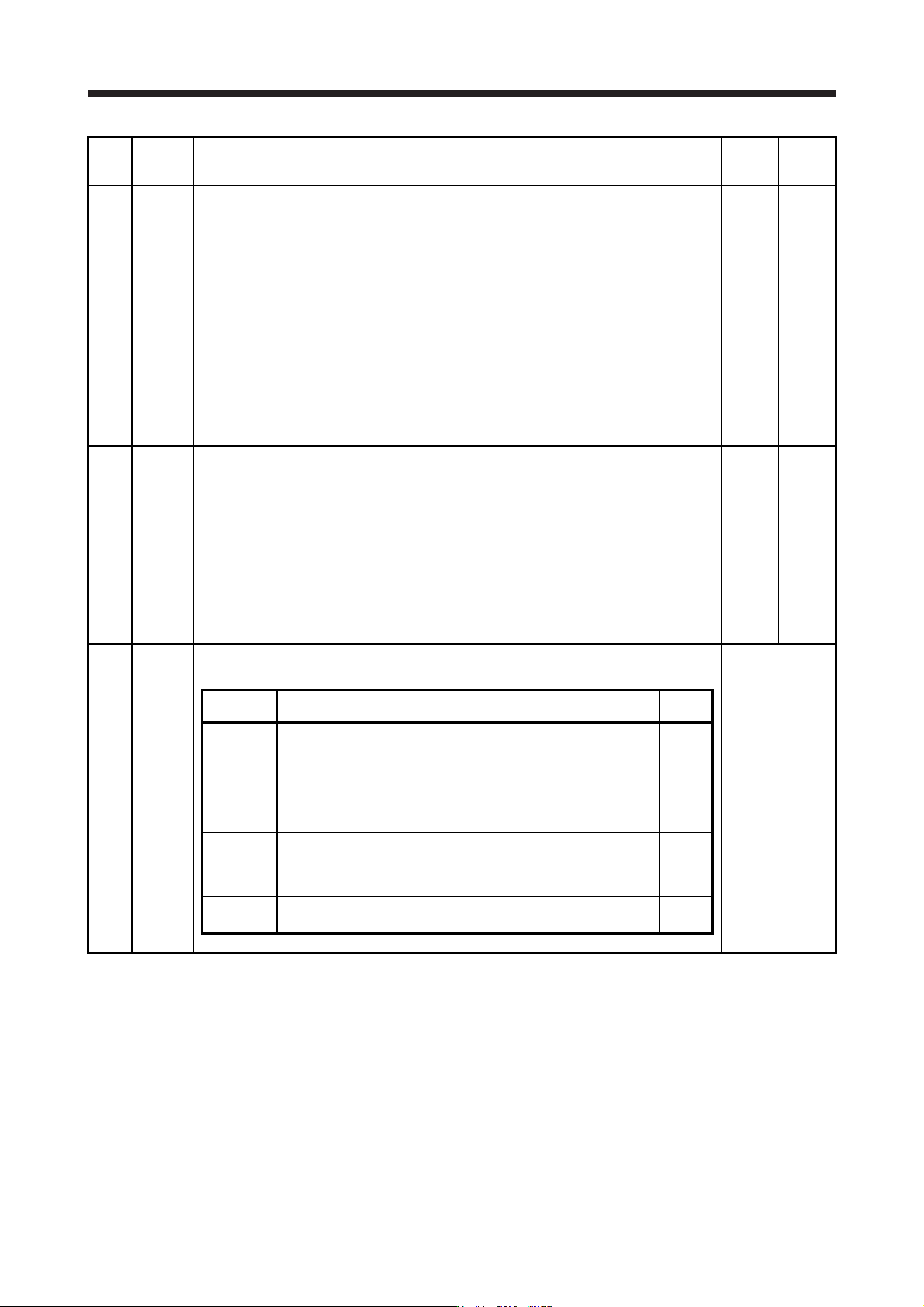
PB23 VFBF Low-pass filter selection
Select the shaft resonance suppression filter and low-pass filter.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Shaft resonance suppression filter selection
0: Automatic setting
1: Manual setting
2: Disabled
When you select "Enabled (_ _ _ 1)" of "Machine resonance
suppression filter 4 selection" in [Pr. PB49], the shaft resonance
suppression filter is not available.
0h
_ _ x _
Low-pass filter selection
0: Automatic setting
1: Manual setting
2: Disabled
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
5. PARAMETERS
5 - 27
No. Symbol Name and function
Initial
value
[unit]
Setting
range
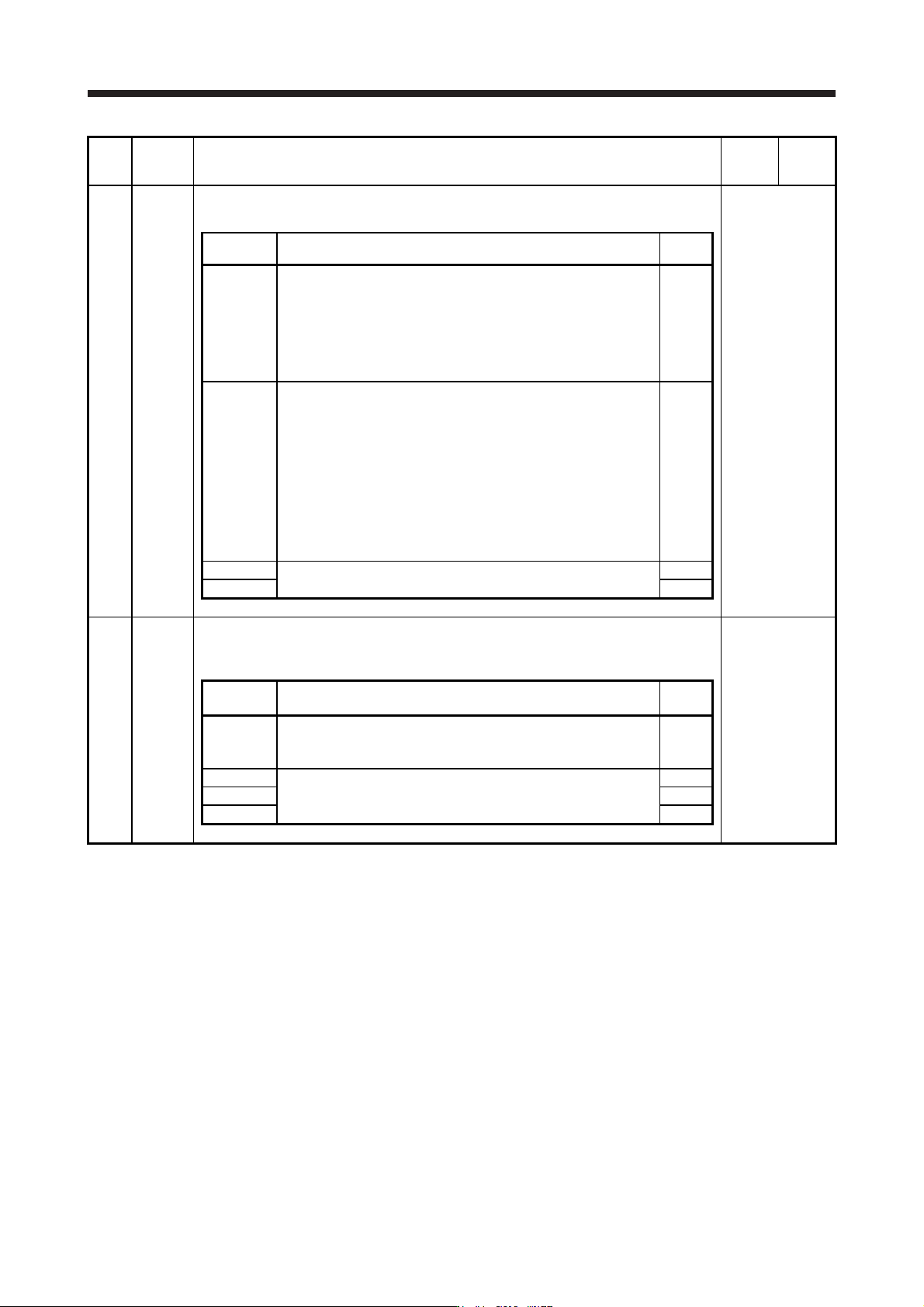
PB24 *MVS Slight vibration suppression control
Select the slight vibration suppression control and PI-PID switching control.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Slight vibration suppression control selection
0: Disabled
1: Enabled
To enable the slight vibration suppression control, select "Manual
mode (_ _ _ 3)" of "Gain adjustment mode selection" in [Pr. PA08].
Slight vibration suppression control cannot be used in the speed
control mode.
0h
_ _ x _ PI-PID switching control selection
0: PI control enabled
(The control can be switched to PID control (proportional control)
with the servo system controller command.)
3: Continuous PID control (proportional control) enabled
If the servo motor at a stop is rotated even for a pulse due to any
external factor, it generates torque to compensate for a position
shift. When the servo motor shaft is to be locked mechanically after
positioning completion (stop), enabling PID control and completing
positioning simultaneously will suppress the unnecessary torque
generated to compensate for a position shift.
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PB25 *BOP1 Function selection B-1
Select enabled/disabled of model adaptive control.
This parameter is supported with software version B4 or later.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Model adaptive control selection
0: Enabled (model adaptive control)
2: Disabled (PID control)
0h
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ 0h
5. PARAMETERS
5 - 28
No. Symbol Name and function
Initial
value
[unit]
Setting
range
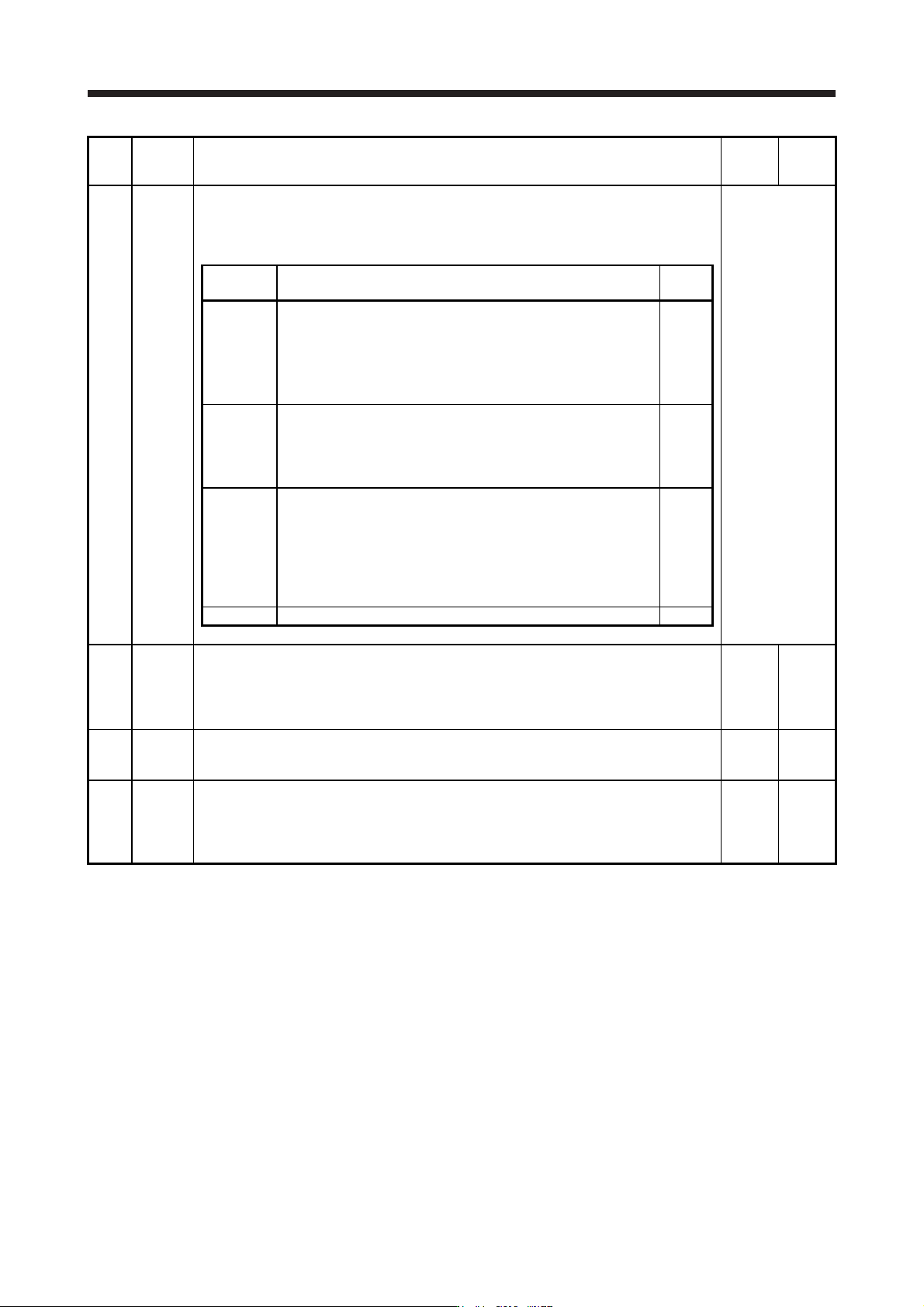
PB26 *CDP Gain switching function
Select the gain switching condition.
Set conditions to enable the gain switching values set in [Pr. PB29] to [Pr. PB36] and [Pr.
PB56] to [Pr. PB60].
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Gain switching selection
0: Disabled
1: Control command from controller is enabled
2: Command frequency
3: Droop pulses
4: Servo motor speed/linear servo motor speed
0h
_ _ x _ Gain switching condition selection
0: Gain after switching is enabled with gain switching condition or
more
1: Gain after switching is enabled with gain switching condition or
less
0h
_ x _ _ Gain switching time constant disabling condition selection
0: Switching time constant enabled
1: Switching time constant disabled
2: Return time constant disabled
Refer to section 7.2.4 for details.
This parameter is used by servo amplifier with software version B4
or later.
0h
x _ _ _ For manufacturer setting 0h
PB27 CDL Gain switching condition
This is used to set the value of gain switching (command frequency, droop pulses, and servo
motor speed/linear servo motor speed) selected in [Pr. PB26].
The set value unit differs depending on the switching condition item. (Refer to section 7.2.3.)
The unit "r/min" will be "mm/s" for linear servo motors.
10
[kpulse/s]
/[pulse]
/[r/min]
0 to
65535
PB28 CDT Gain switching time constant
This is used to set the time constant until the gains switch in response to the conditions set in
[Pr. PB26] and [Pr. PB27].
1
[ms]
0 to 100
PB29 GD2B Load to motor inertia ratio/load to motor mass ratio after gain switching
This is used to set the load to motor inertia ratio/load to motor mass ratio for when gain
switching is enabled.
This parameter is enabled only when you select "Manual mode (_ _ _ 3)" of "Gain adjustment
mode selection" in [Pr. PA08].
7.00
[Multiplier]
0.00 to
300.00