sh030106u.pdf - 第531页
16. FULLY CLOSE D L OOP SYS TEM 16 - 6 16.2 Load- side enc oder POINT Always use the load-s ide enc oder cab le intro duced in this secti on. Using other products m ay caus e a ma lfunctio n. For details of the l oad-si …
16. FULLY CLOSED LOOP SYSTEM
16 - 5
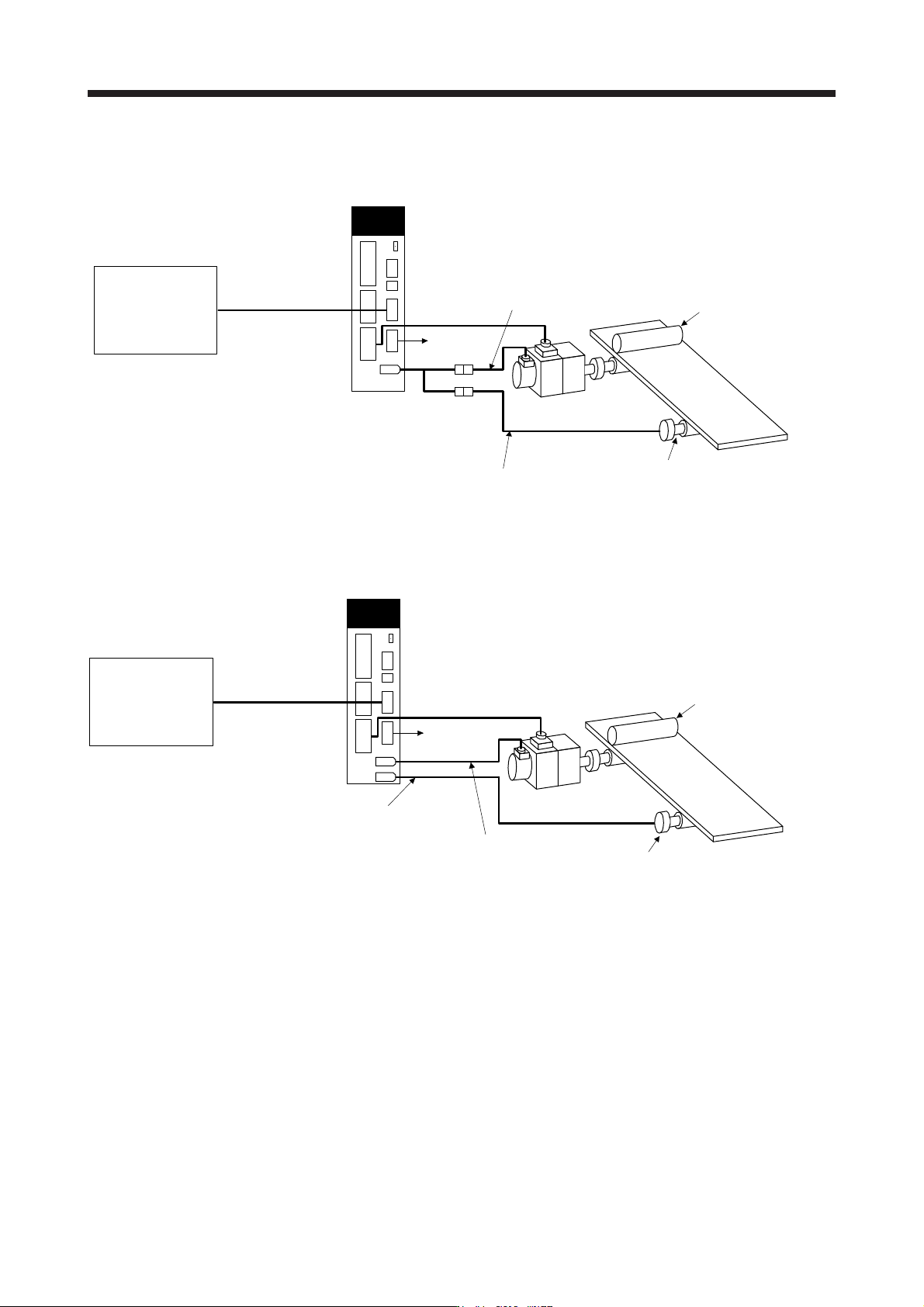
(2) For a rotary encoder
(a) MR-J4-_B_ servo amplifier
CN2
Servo motor
Two-wire type rotary encoder HG-KR,
HG-MR servo motor (4194304 pulses/rev)
Drive part
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
To the next
servo
amplifier
(Note)
(Note)
Load-side encoder signal
Servo motor encoder signal
Note. Use a two-wire t
y
pe encoder cable. A fou
r
-wire t
y
pe linear encoder cable cannot be used.
(b) MR-J4-_B_-RJ servo amplifier
CN2
CN2L
Servo motor
A/B/Z-phase differential output, two-wire type, or four-wire type
rotary encoder HG-KR, HG-MR servo motor (4194304 pulses/rev)
or synchronous encoder Q171ENC-W8 (4194304 pulses/rev)
Drive part
Servo amplifier
SSCNET III/H controller
SSCNET III/H
Position command
control signal
Servo motor encoder signal
Load-side encoder signal
To the next servo
amplifier
16. FULLY CLOSED LOOP SYSTEM
16 - 6
16.2 Load-side encoder
POINT
Always use the load-side encoder cable introduced in this section. Using other
products may cause a malfunction.
For details of the load-side encoder specifications, performance and assurance,
contact each encoder manufacturer.
16.2.1 Linear encoder
Refer to "Linear Encoder Instruction Manual" for usable linear encoders.
16.2.2 Rotary encoder
If using a rotary encoder as a load-side encoder, use the following servo motor or encoder.
Servo amplifier HG-KR HG-MR Synchronous encoder Q171ENC-W8
A/B/Z-phase
differential output
(Note)
MR-J4-_B_
MR-J4-_B_-RJ
Note.
A
/B/Z-phase differential output rotary encoders with the same specifications as A/B/Z-phase differential output
linear encoders can be used as load-side encoders. Refer to "Linear Encoder Instruction Manual".
Use a two-wire type encoder cable for MR-J4-_B_ servo amplifiers. Do not use MR-EKCBL30M-L,
MREKCBL30M-H, MR-EKCBL40M-H, or MR-EKCBL50M-H as they are four-wire type. If a 30 to 50 m
encoder cable is required, fabricate a two-wire type encoder cable by referring to app. 9.
16.2.3 Configuration diagram of encoder cable
Configuration diagram for servo amplifier and load-side encoder is shown below. Cables used vary,
depending on the load-side encoder.
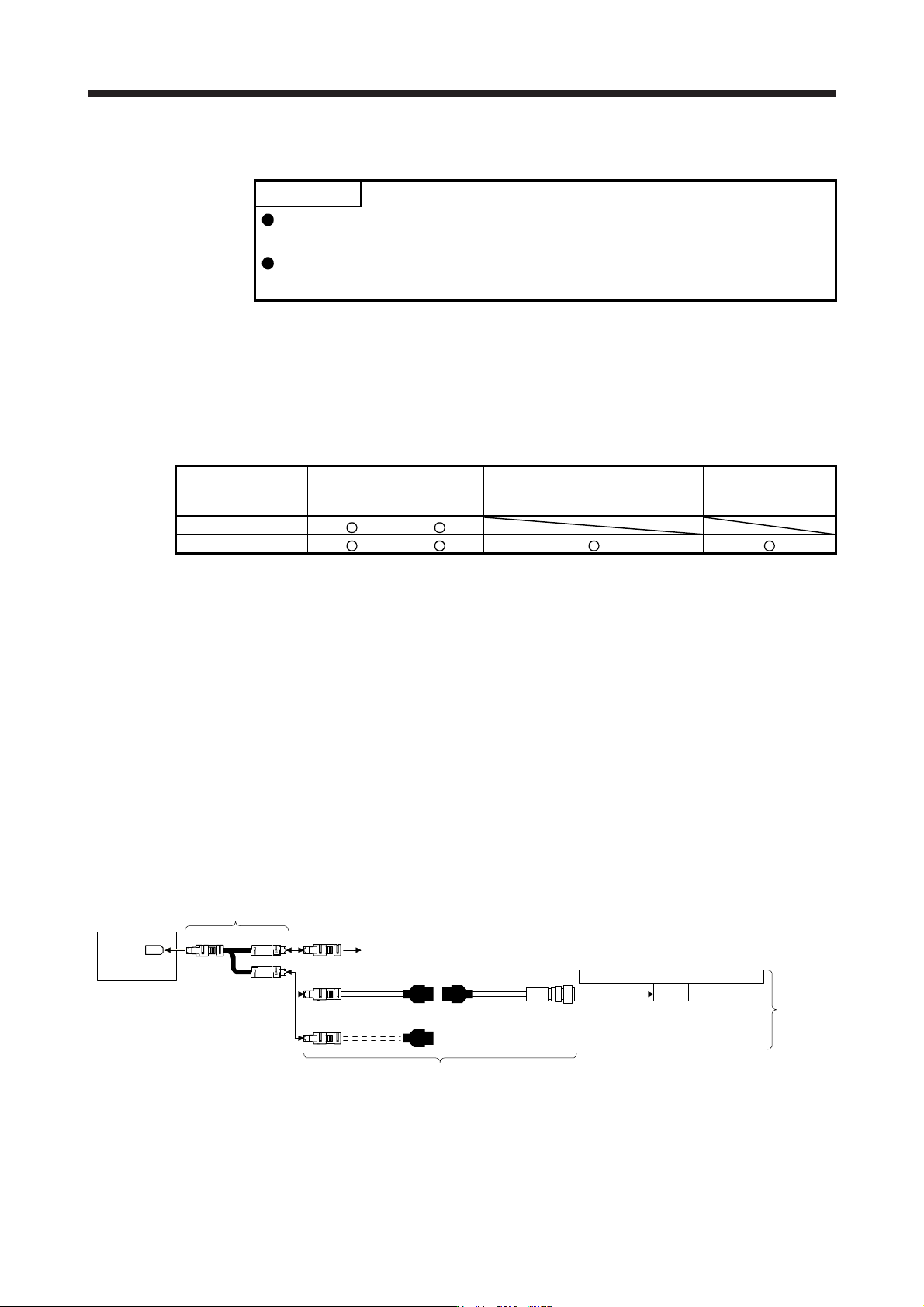
(1) Linear encoder
Refer to "Linear Encoder Instruction Manual" for encoder cables for linear encoder.
(a) MR-J4-_B_ servo amplifier
Servo amplifier
Linear encoder
CN2
MR-J4FCCBL03M branch cable
(Refer to section 16.2.4)
Encoder of rotary servo motor
Encoder cable
(Refer to "Linear Encoder Instruction Manual".)
CN2 MOTOR
SCALE
Load-side
encoder
16. FULLY CLOSED LOOP SYSTEM
16 - 7
(b) MR-J4-_B_-RJ servo amplifier
You can connect the linear encoder without using a branch cable shown in (a) for MR-J4-_B_-RJ
servo amplifier. You can also use a four-wire type linear encoder.
CN2
CN2L
Servo amplifier
Linear encoder
Encoder of rotary servo motor
Encoder cable
(Refer to "Linear Encoder Instruction Manual".)
Load-side
encoder
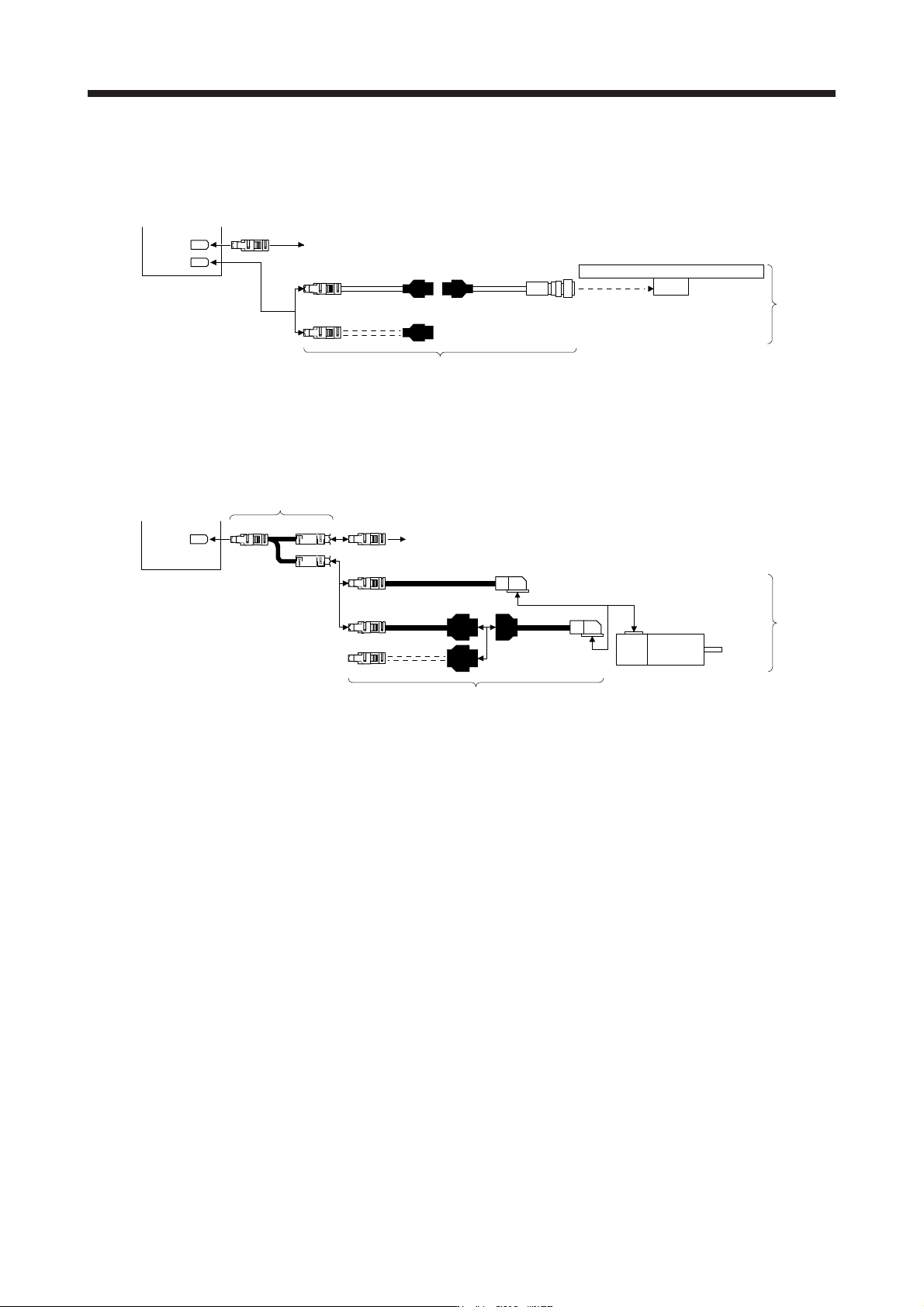
(2) Rotary encoder
(a) MR-J4-_B_ servo amplifier
Refer to "Linear Encoder Instruction Manual" for encoder cables for rotary encoder.
Servo amplifier
CN2
MR-J4FCCBL03M branch cable
(Refer to section 16.2.4)
Encoder of rotary servo motor
Encoder cable
(Refer to "Servo Motor Instruction Manual (Vol. 3)".)
CN2 MOTOR
SCALE
(Note)
(Note)
Load-side
encoder
Servo motor
HG-KR
HG-MR
Note. Use a two-wire t
y
pe encoder cable. A fou
r
-wire t
y
pe linear encoder cable cannot be used.