sh030106u.pdf - 第469页
14. USIN G A LINEAR SER VO MOTOR 14 - 2 14. 1.2 Servo system with auxilia ry equi pment CAUTION Connectin g a linear servo motor for differe nt axis to th e U, V, W, or CN2 m ay cause a m alfuncti on. POINT Equipment oth…
14. USING A LINEAR SERVO MOTOR
14 - 1
14. USING A LINEAR SERVO MOTOR
WARNING
When using the linear servo motor, read "Linear Servo Motor Instruction Manual"
and "Linear Encoder Instruction Manual".
14.1 Functions and configuration
14.1.1 Summary
The fields of semiconductor/LCD manufacturing systems, mounters, and others have strong demands for
high accuracy, high speed, and efficiency. Therefore, the number of systems using a linear servo motor for a
drive axis has been increasing. Using a linear servo system can achieve higher speed and
acceleration/deceleration characteristics than the ball screw-drive system. Unlike the ball screw-drive
system, the linear servo system does not have disadvantages such as ball screw wear. The linear servo
system allows the service life of equipment to be prolonged. In addition, since a response error due to
backlash and friction does not occur, you can establish a high-accuracy system.
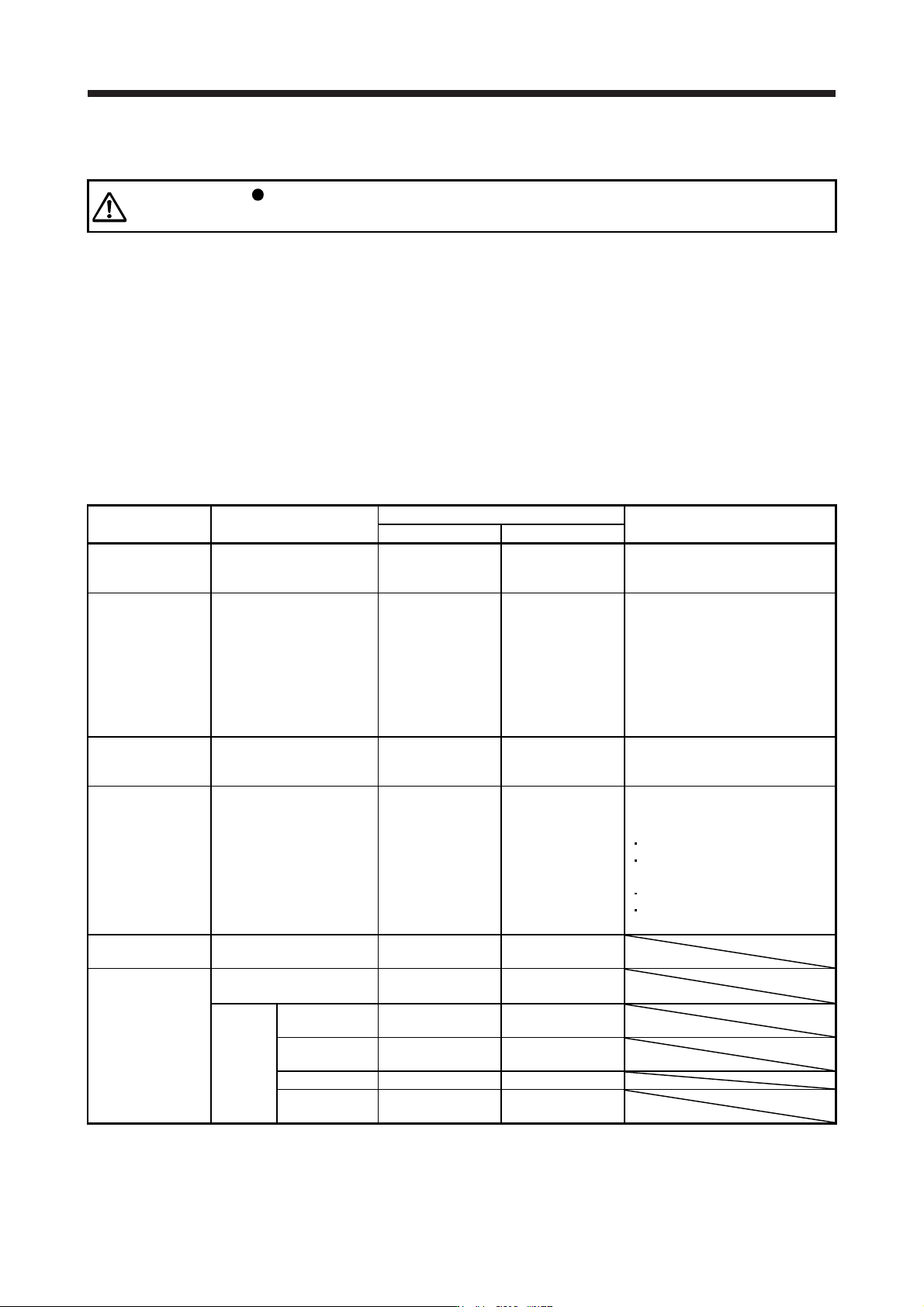
The following shows the differences between the linear servo motor and the rotary servo motor.
Category Item
Differences
Remark
Linear servo motor Rotary servo motor
External I/O signal
FLS (Upper stroke limit),
RLS (Lower stroke limit)
Required (for
magnetic pole
detection)
Not required
Automatically turns on in the
parameter setting.
Motor pole
adjustment
Magnetic pole detection Required Not required
(default setting)
Automatically executed at the first
servo-on after the power is turned
on.
For the absolute position linear
encoder, [Pr. PL01] can disable the
magnetic pole detection. The timing
of the magnetic pole detection can
be changed with [Pr. PL01]. (Refer
to (2) (b) of section 14.3.3.)
Home position
return
Reference home position 1048576 pulses unit
(initial value)
One servo motor
revolution unit
Home position return pitch can be
changed with parameter setting.
(Refer to section 14.3.3)
Absolute position
detection system
Absolute position encoder
battery
Not required Required
The following alarms and warnings
are not provided for the linear servo
motor.
[AL. 25 Absolute position erased]
[AL. 92 Battery cable
disconnection warning]
[AL. 9F Battery warning]
[AL. E3 Absolute position counter
warning]
Auto tuning
Load to motor inertia ratio
(J)
Load to motor mass
ratio
Load to motor
inertia ratio
MR Configurator2
(SW1DNC-MRC2-_)
Motor speed
(Data display and setting)
mm/s unit r/min unit
(Software version
1.19V or later)
Test
operation
function
Positioning
operation
Supported Supported
Motor-less
operation
None Supported
JOG operation None Supported
Program
operation
Supported Supported
14. USING A LINEAR SERVO MOTOR
14 - 2
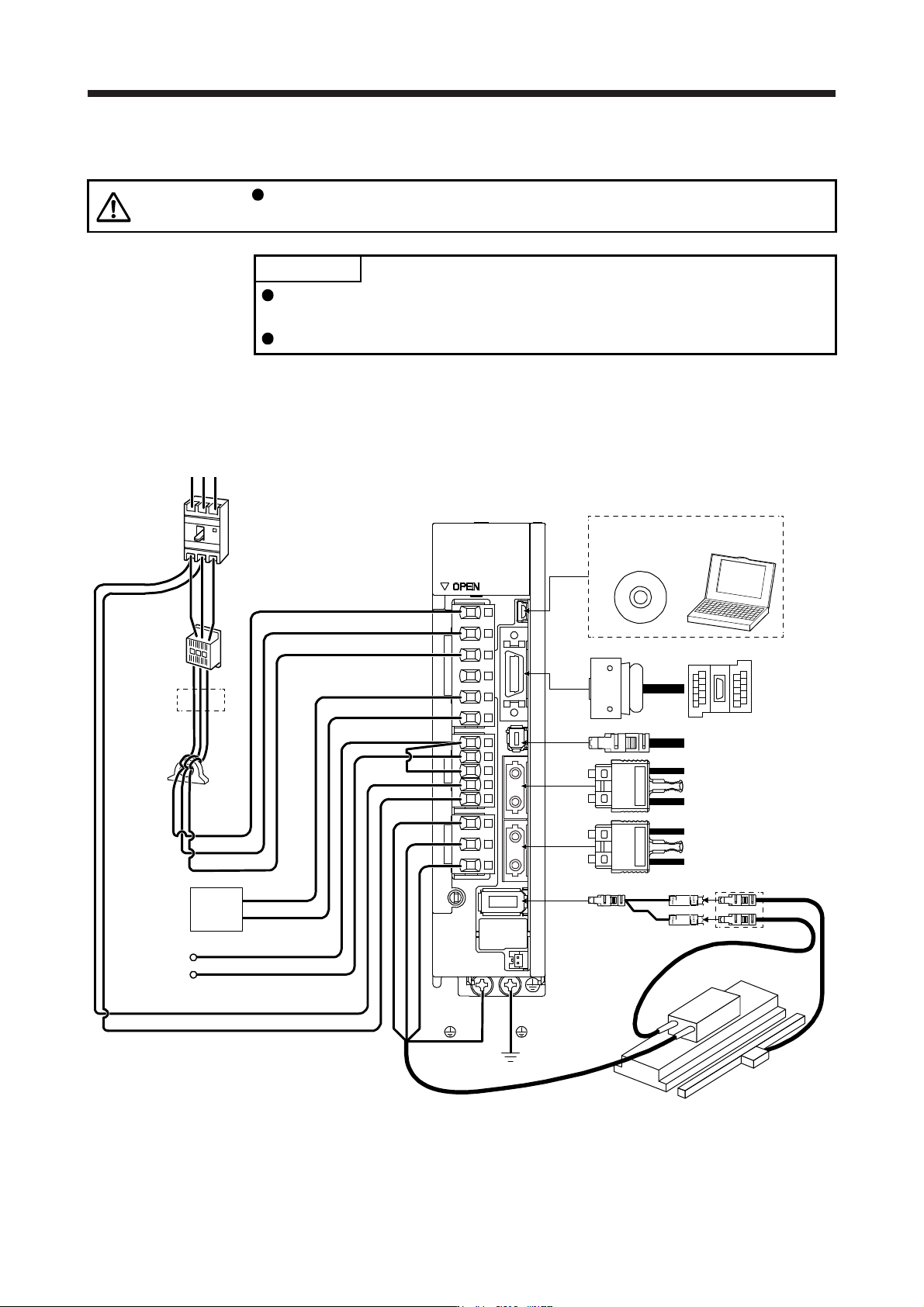
14.1.2 Servo system with auxiliary equipment
CAUTION
Connecting a linear servo motor for different axis to the U, V, W, or CN2 may
cause a malfunction.
POINT
Equipment other than the servo amplifier and linear servo motor are optional or
recommended products.
When using the linear servo motor, set [Pr. PA01] to "_ _ 4 _".
(1) MR-J4-_B_
The configuration diagram is an example of MR-J4-20B. When using the other servo amplifiers, the
configuration will be the same as rotary servo motors except for connections of linear servo motors and
linear encoders. Refer to section 1.8 depending on servo amplifiers you use.
Line noise
filter
(FR-BSF01)
CN5
Regenerative
option
P+
C
L11
L21
P3
P4
Personal
computer
MR Configurator2
CN3
CN8
CN1A
CN1B
CN2
W
V
U
L1
L2
L3
(Note 3)
Magnetic
contactor
(MC)
(Note 1)
Power factor
improving DC
reactor
(FR-HEL)
Molded-case
circuit breaker
(MCCB)
Junction
terminal
block
Safety relay or
MR-J3-D05 safety
logic unit
Servo system controller
or previous servo
amplifier CN1B
Next servo amplifier
CN1A or cap
(Note 2)
Power
supply
RS T
(Note 4)
Linear encoder
Linear servo motor
Encoder
cable
SCALE
THM
D
(Note 5)
(Note 6)
Thermistor

14. USING A LINEAR SERVO MOTOR
14 - 3
Note 1. The power factor improving AC reactor can also be used. In this case, the power factor improving DC reactor cannot be used.
When not usin
g
the power factor improvin
g
DC reactor, short P3 and P4.
2.
A
1-phase 200 V AC to 240 V AC power supply may be used with the servo amplifier of MR-J4-200B or less. For 1-phase 200
V AC to 240 V AC, connect the power supply to L1 and L3. Leave L2 open. For power supply specifications, refer to section
1.3.
3. Depending on the main circuit voltage and operation pattern, bus voltage decreases, and that may cause the forced stop
deceleration to shift to the dynamic brake deceleration. When dynamic brake deceleration is not required, slow the time to turn
off the ma
g
netic contactor.
4. For the branch cable, use the MR-J4THCBL03M
(
optional
)
.
5.
A
lwa
y
s connect between P+ and D terminals. When usin
g
the re
g
enerative option, refer to section 11.2.
6. Connect the thermistor to THM of branch cable and connect the encoder cable to SCALE correctly. Incorrect setting will trigger
[AL. 16].