sh030106u.pdf - 第619页
17. APPLICATIO N OF FUNCTIONS 17 - 68 17.2 Master -slave oper ation func tion WARNING Configure the cir cuit so that all th e master and slav e axes for the s ame mach ine are stopp ed by the c ontro ller forc ed stop at…
17. APPLICATION OF FUNCTIONS
17 - 67
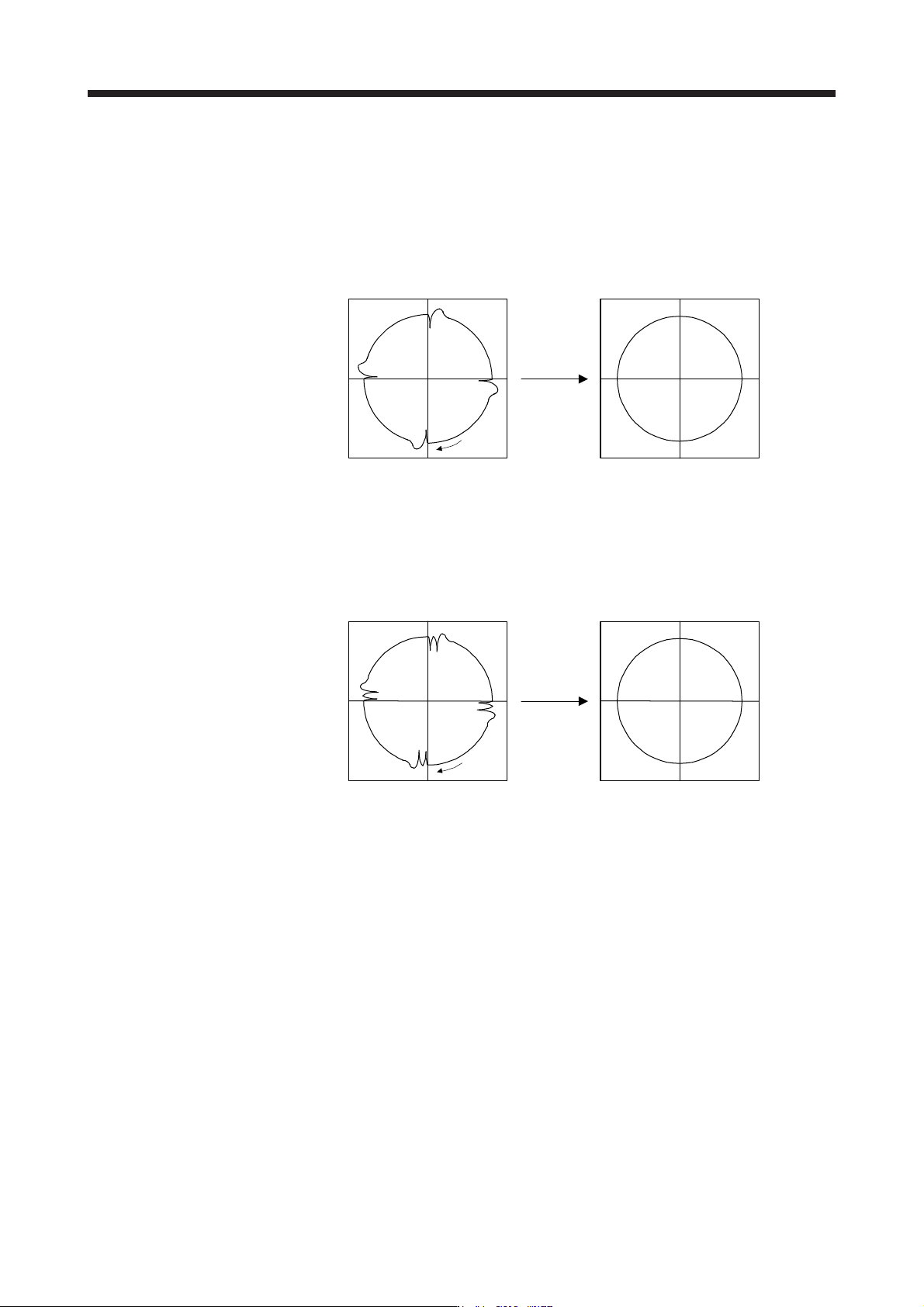
5) Adjusting the lost motion compensation timing
When the machine has low rigidity, the speed loop gain is set lower than the standard setting
value, or the servo motor is rotating at high speed, quadrant projections may occur behind the
quadrant change points. In this case, you can suppress the quadrant projections by delaying the
lost motion compensation timing with [Pr. PX41 Lost motion compensation timing]. Increase the
setting value of [Pr. PX41] from 0 ms (Initial value) by approximately 0.5 ms to adjust the
compensation timing.
Before timing delay compensation After timing delay compensation
Compensation
Travel
direction
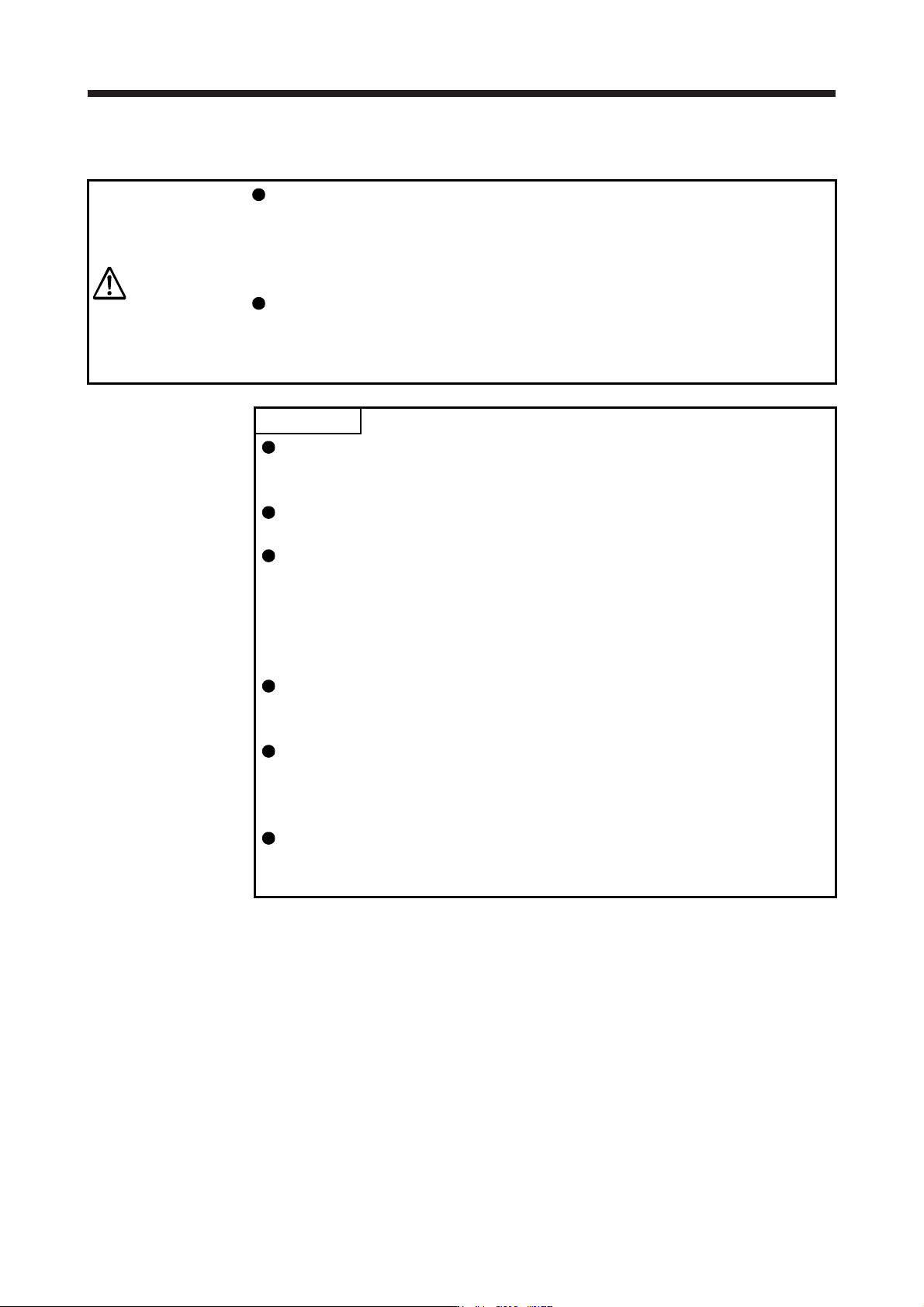
6) Adjusting the lost motion compensation non-sensitive band
When the lost motion is compensated twice around a quadrant change point, set [Pr. PX42 Lost
motion compensation non-sensitive band]. Increase the setting value so that the lost motion is not
compensated twice. Setting [Pr. PX42] may change the compensation timing. Adjust the lost
motion compensation timing of (9) (b) 5) in this section.
Before timing delay compensation After timing delay compensation
Compensation
Travel
direction
17. APPLICATION OF FUNCTIONS
17 - 68
17.2 Master-slave operation function
WARNING
Configure the circuit so that all the master and slave axes for the same machine
are stopped by the controller forced stop at the moment of a stop of a master or
slave axis due to such as a servo alarm. When they are not stopped
simultaneously by the controller forced stop, the servo motor may operate
unexpectedly and the machine can be damaged.
All the master and slave axes for the same machine should turn on/off EM1
(Forced stop 1) simultaneously. When EM1 (Forced stop 1) is not turned on/off
simultaneously, the servo motor may operate unexpectedly and the machine can
be damaged.
POINT
The master-slave operation function works only when the forced stop
deceleration function is disabled. When the forced stop deceleration function is
enabled, [AL. 37] will occur.
The master-slave operation function cannot be used with the continuous
operation to torque control.
Use the master-slave operation function with the following controllers. Refer to
the manuals for each servo system controller for compatible software versions,
and other details.
RD77MS/QD77MS_/LD77MS_
R_MTCPU/Q17_DSCPU
Q170MSCPU
When the function is used in vertical axis system, set the same value to the
parameters regarding the dynamic brake and electromagnetic brake to prevent a
drop of axes.
The servo-on command of the master axis and slave axis should be turned
on/off simultaneously. If the servo-on command is turned on only for a slave
axis, torque will not be generated. Therefore, an extreme load will be applied to
the electromagnetic brake of the master axis for using in vertical axis system.
The master-slave operation function is available for servo amplifier with software
version A8 or later. All servo amplifiers used in the same system connected to a
controller should be software version A8 or later.
17. APPLICATION OF FUNCTIONS
17 - 69
(1) Summary
The master-slave operation function transmits a master axis torque to slave axes using driver
communication and the torque as a command drives slave axes by torque control.
Transmission of torque data from the master axis to slave axes is via SSCNET III/H. Additional wiring is
not required.
(2) System configuration
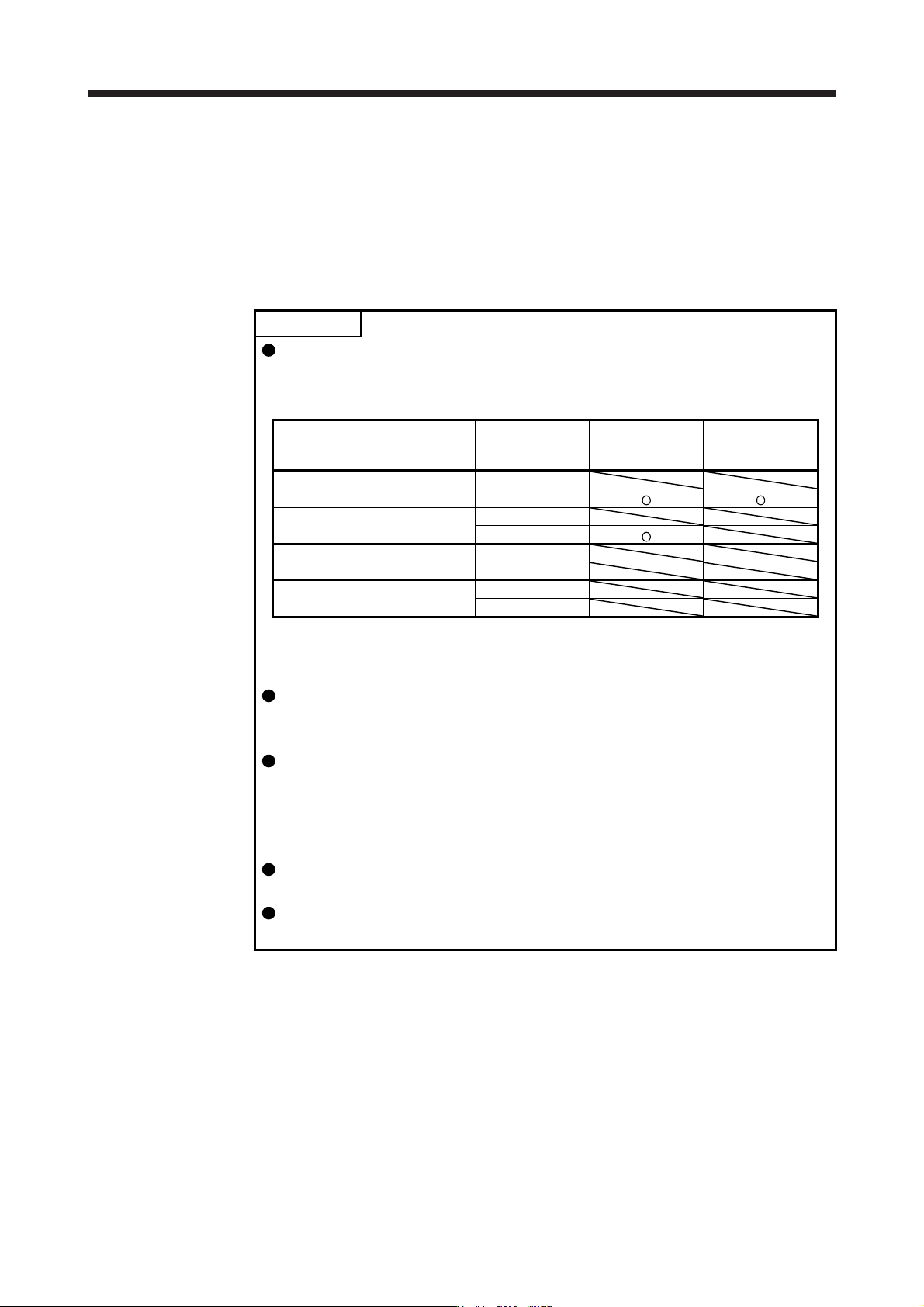
POINT
The control modes compatible with the master-slave operation function are as
follows.
Master-slave operation function compatibility table
Control mode
Forced stop
deceleration
function
Master axis (Note) Slave axis (Note)
Standard control mode
Enabled
Disabled
Fully closed loop control mode
Enabled
Disabled
Linear servo motor control mode
Enabled
Disabled
DD motor control mode
Enabled
Disabled
Note. When a setting for the master-slave operation is set to an axis which is not compatible with the
maste
r
-slave operation function, [AL. 37] will occur.
The master axis and slave axis are recommended to use for a linked condition
on a mechanical constitution. When they are not linked, they can reach a speed
limit level. Doing so may cause [AL. 31 Overspeed].
The slave axes use the control command from the master axis. Therefore, the
controller mainly controls parameter settings, servo-on command, acquisition of
monitor information from a servo amplifier, etc. The commands regarding
absolute positioning such as setting absolute position detection and requiring
home position setting from the controller to slave axes must not be made.
Configure the circuit so that all the master and slave axes are stopped at the
moment of a stop of a master or slave axis due to such as an alarm.
When the STO signal of a servo amplifier is used, the master axis and slave axis
should be turned off simultaneously.