sh030106u.pdf - 第464页
13. USIN G STO FUNCTI ON 13 - 11 13.3.4 Ext erna l I/O signa l connec tion example using a motion co ntrol ler POINT This conn ectio n is f or sourc e i nterface. F or the oth er I/O signa ls, refer to the connection exa…
13. USING STO FUNCTION
13 - 10
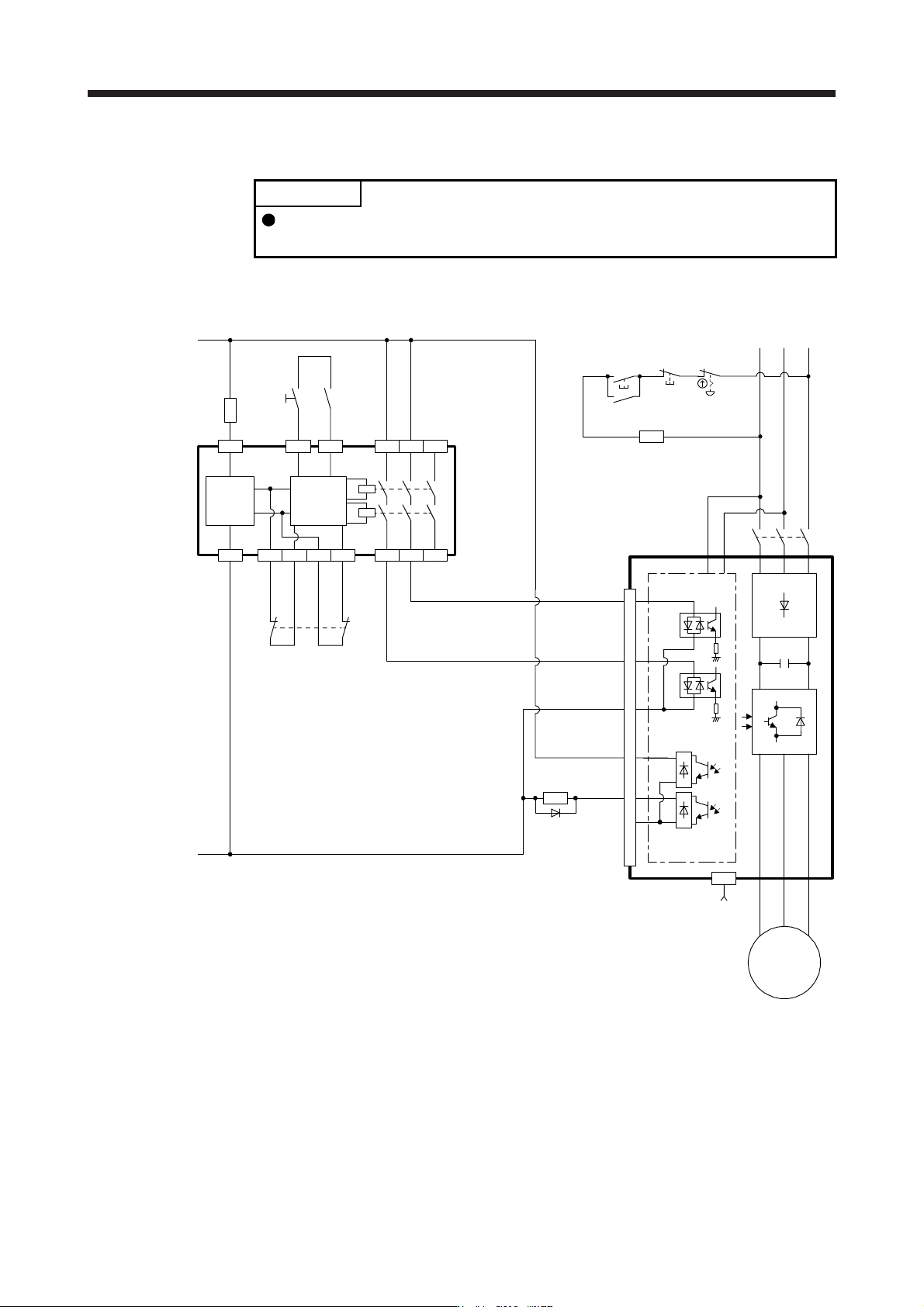
13.3.3 External I/O signal connection example using an external safety relay unit
POINT
This connection is for source interface. For the other I/O signals, refer to the
connection examples in section 3.2.2.
This connection example complies with the requirement of ISO/EN ISO 13849-1:2015 Category 3 PL d.
For details, refer to the safety relay module user’s manual.
Safety relay module
MELSEC
(QS90SR2S)
Fuse
24 V
0 V
S2
S1 or
EMG
(Note)
K3
Control
circuit
Power
supply
S1: STO shut-off switch (STO switch)
S2: Start switch (STO release switch)
S3: On switch
S4: Off switch
KM1: Magnetic contactor
K3: Safety relay
EMG: Emergency stop switch
+24V XS0 XS1 Z00 Z10 Z20
X0
COM0
24G X1
COM1
Z01 Z11 Z21
K3
CN8
KM1
CN3
20
EM1
or
EM2
Control circuit
Servo amplifier
STO1
TOFB1
TOFCOM
TOFB2
STO2
STOCOM
M
Servo motor
KM1
KM1
EMGS4
S3
Note. To enable the STO function of the servo amplifier by using "Emergency switching off", change S1 to EMG. The stop category at
this time is "0". If STO is turned off while the servo motor is rotatin
g
, [AL. 63 STO timin
g
error] will occur.
13. USING STO FUNCTION
13 - 11
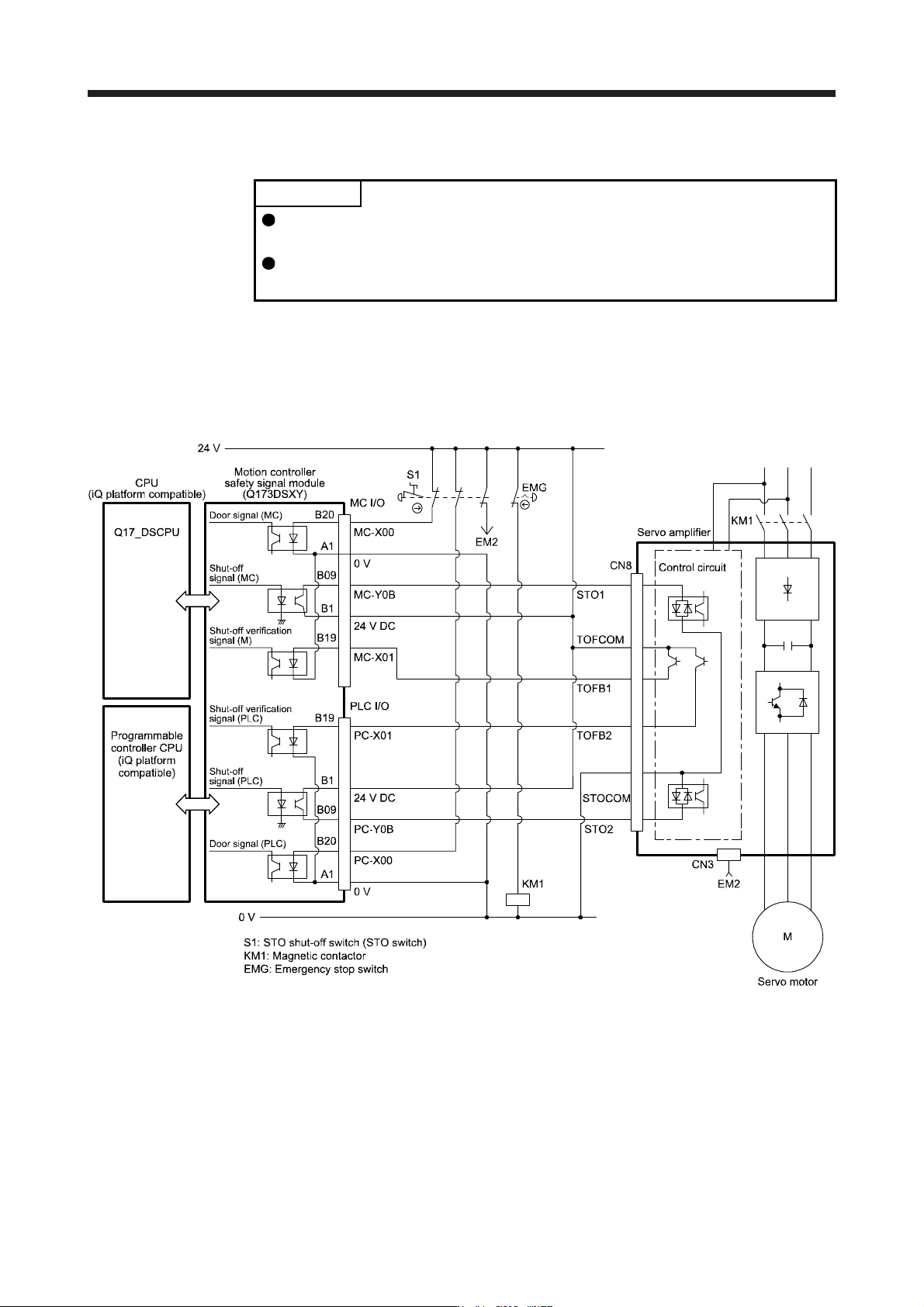
13.3.4 External I/O signal connection example using a motion controller
POINT
This connection is for source interface. For the other I/O signals, refer to the
connection examples in section 3.2.2.
For MC-Y0B and PC-Y0B, design a sequence program to output MC-Y0B and
PC-Y0B after the servo motor stops.
This connection diagram is an example of STO circuit configured with a servo amplifier and motion controller.
Use the switch that complies with the requirement of ISO/EN ISO 13849-1:2015 Category 3 PL d as an
emergency stop switch. This connection example complies with the requirement of ISO/EN ISO 13849-
1:2015 Category 3 PL d. The following shows an example of I/O (X and Y) signal assignment of the motion
controller safety signal module. For details, refer to the motion controller user’s manual.
13. USING STO FUNCTION
13 - 12
13.4 Detailed description of interfaces
This section provides the details of the I/O signal interfaces (refer to the I/O division in the table) given in
section 13.2. Refer to this section and make connection with the external device.
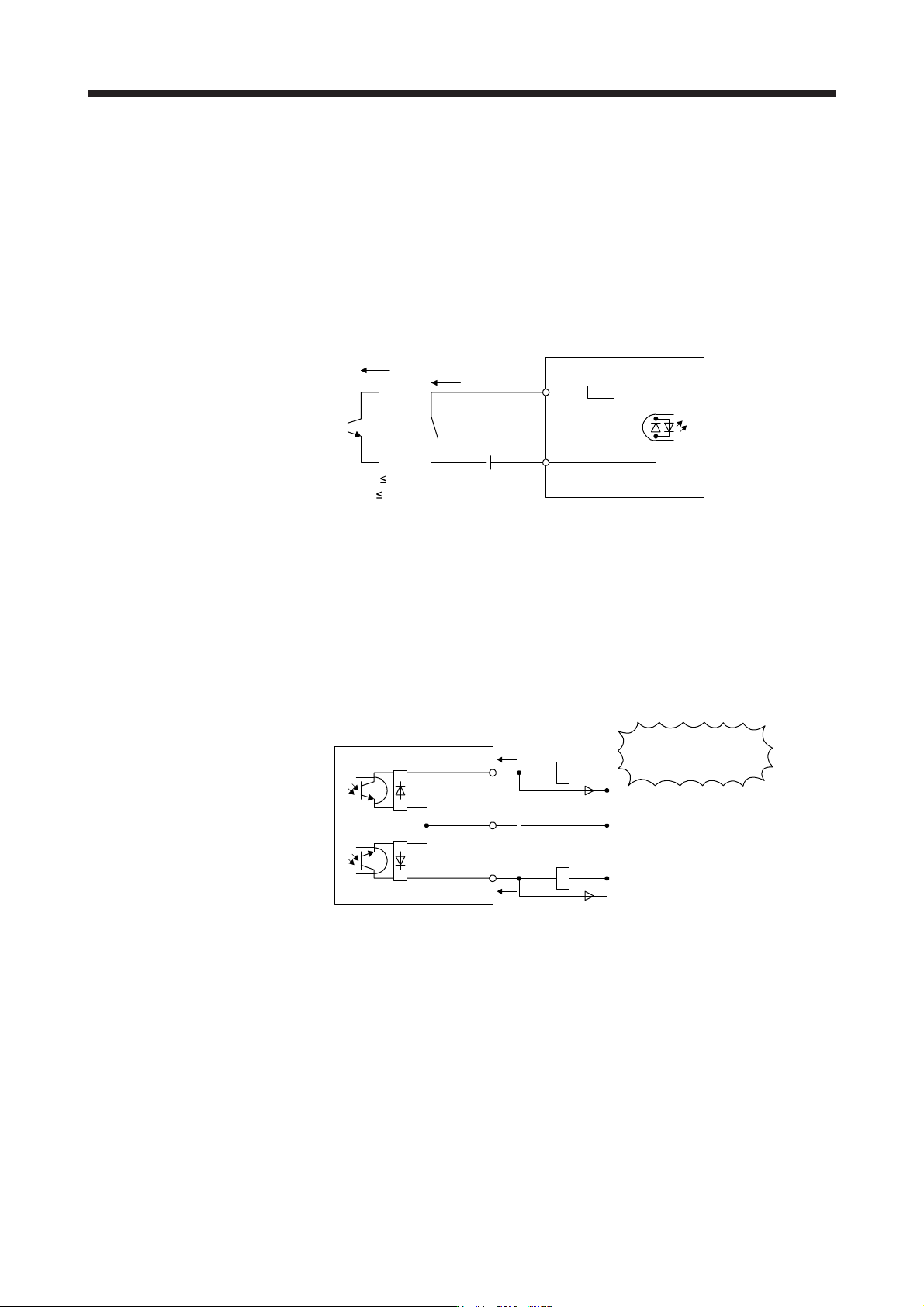
13.4.1 Sink I/O interface
(1) Digital input interface DI-1
This is an input circuit whose photocoupler cathode side is the input terminal. Transmit signals from sink
(open-collector) type transistor output, relay switch, etc.
Approx. 3.0 kΩ
STO1
STO2
Servo amplifier
Switch
Approx. 5 mA
For transistor
STOCOM
TR
V
CES
1.0 V
I
CEO
100 µA
24 V DC ± 10%
300 mA
(2) Digital output interface DO-1
This is a circuit in which the collector of the output transistor is the output terminal. When the output
transistor is turned on, the current will flow to the collector terminal.
A lamp, relay or photocoupler can be driven. Install a diode (D) for an inductive load, or install an inrush
current suppressing resistor (R) for a lamp load.
(Rated current: 40 mA or less, maximum current: 50 mA or less, inrush current: 100 mA or less) A
maximum of 5.2 V voltage drop occurs in the servo amplifier.
(a) When outputting two STO states by using each TOFB
TOFCOM
Servo amplifier
TOFB2
If polarity of diode is
reversed, servo amplifier
will malfunction.
LoadTOFB1
Load
(Note)
24 V DC ± 10%
300 mA
Note. If the voltage drop (maximum of 2.6 V) interferes with the relay operation, apply high
volta
g
e
(
maximum of 26.4 V
)
from external source.