sh030106u.pdf - 第192页
5. PARAMETE RS 5 - 47 No. Sym bol Name and function Initial value [unit] Setting range PD31 VLC Master-sl ave operation - Speed limit coeff icient on sl ave This parameter is used to set a internal speed limit value coef…
5. PARAMETERS
5 - 46
No. Symbol Name and function
Initial
value
[unit]
Setting
range
PD16 *MD1 Driver communication setting - Master - Transmit data selection 1
This parameter is used to select transmit data from master axis to slave axis.
When setting this amplifier as master axis ([Pr. PD15] is "_ _ 0 1".), select "_ _ 3 8 (torque
command)" with this parameter.
This parameter setting is used with servo amplifier with software version A8 or later.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x Transmission data selection
00: Disabled
38: Torque command
00h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PD17 *MD2 Driver communication setting - Master - Transmit data selection 2
This parameter is used to select transmit data from master axis to slave axis.
When setting this amplifier as master axis ([Pr. PD15] is "_ _ 0 1".), select "_ _ 3 A (speed limit
command)" with this parameter.
This parameter setting is used with servo amplifier with software version A8 or later.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ x x Transmission data selection
00: Disabled
3A: speed limit command
00h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PD20 *SLA1 Driver communication setting - Slave - Master axis No. selection 1
Select a master axis when this amplifier is slave axis.
When setting this amplifier as slave axis ([Pr. PD15] is "_ _ 1 0".), set the axis No. of the servo
amplifier of master. Refer to section 4.3.1 for details of axis Nos. Setting "0" disables this
parameter.
This parameter setting is used with servo amplifier with software version A8 or later.
0 0 to 32
PD30 TLC Master-slave operation - Torque command coefficient on slave
This parameter is used to set a internal torque command coefficient to torque command value
received from master axis.
This parameter is enabled when this amplifier is set as slave axis ([Pr. PD15] is "_ _ 1 0".).
The maximum value is 500. Setting over 500 will be 500.
Setting 100 [%] means multiplication of one. The torque ratio will be 100 (master) to 100
(slave).
Setting 90 [%] means multiplication of 0.9. The torque ratio will be 100 (master) to 90 (slave).
This parameter setting is used with servo amplifier with software version A8 or later.
0 [%] 0 to 500
5. PARAMETERS
5 - 47
No. Symbol Name and function
Initial
value
[unit]
Setting
range
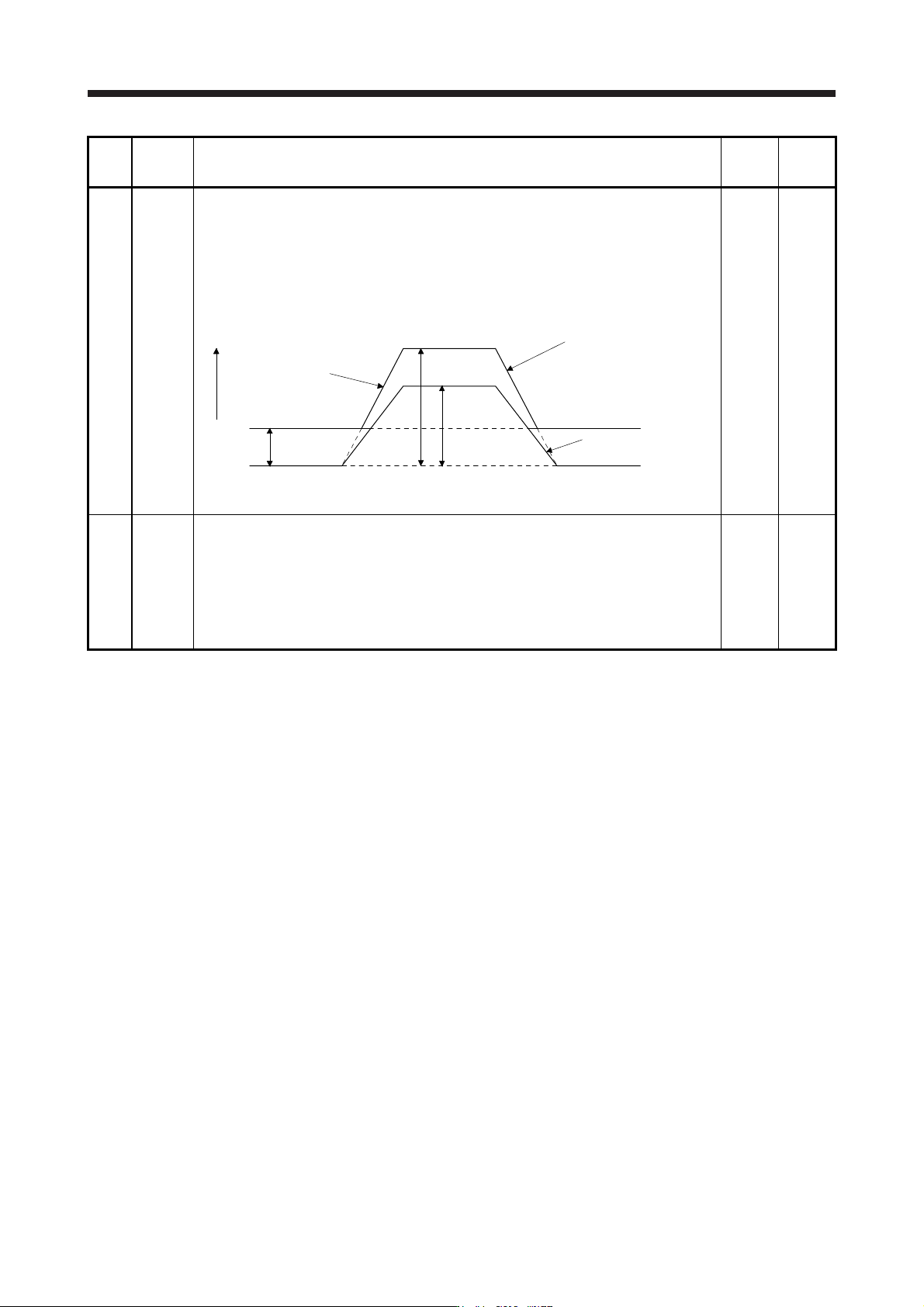
PD31 VLC Master-slave operation - Speed limit coefficient on slave
This parameter is used to set a internal speed limit value coefficient to speed limit command
value received from master axis.
This parameter is enabled when this amplifier is set as slave axis ([Pr. PD15] is "_ _ 1 0".).
The maximum value is 500. Setting over 500 will be 500.
Setting 100 [%] means multiplication of one.
Setting example: [Pr. PD31 (VLC)] = 140 [%], [Pr. PD32 (VLL)] = 300 [r/min], and master side
acceleration/deceleration at 1000 [r/min]
0 [%] 0 to 500
VLL
0
Speed command from
master side × VLC [%]
Speed limit value o
f
slave side
300 r/min
1400 r/min
1000 r/min
Speed limit command
from master side (drive
r
communication)
Speed (r/min)
This parameter setting is used with servo amplifier with software version A8 or later.
PD32 VLL Master-slave operation - Speed limit adjusted value on slave
This parameter is used to set a minimum value for internal speed limit value.
This parameter is enabled when this amplifier is set as slave axis ([Pr. PD15] is "_ _ 1 0".).
The speed limit value will not be this setting value or lower.
This parameter ensures torque control range at low speed driving (avoid area likely to reach
speed limit). Set 100 to 500 [r/min] normally as a reference.
Refer to [Pr. PD31] for the setting example.
This parameter setting is used with servo amplifier with software version A8 or later.
0 [r/min]
0 to
32767
5. PARAMETERS
5 - 48
5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ])
No. Symbol Name and function
Initial
value
[unit]
Setting
range
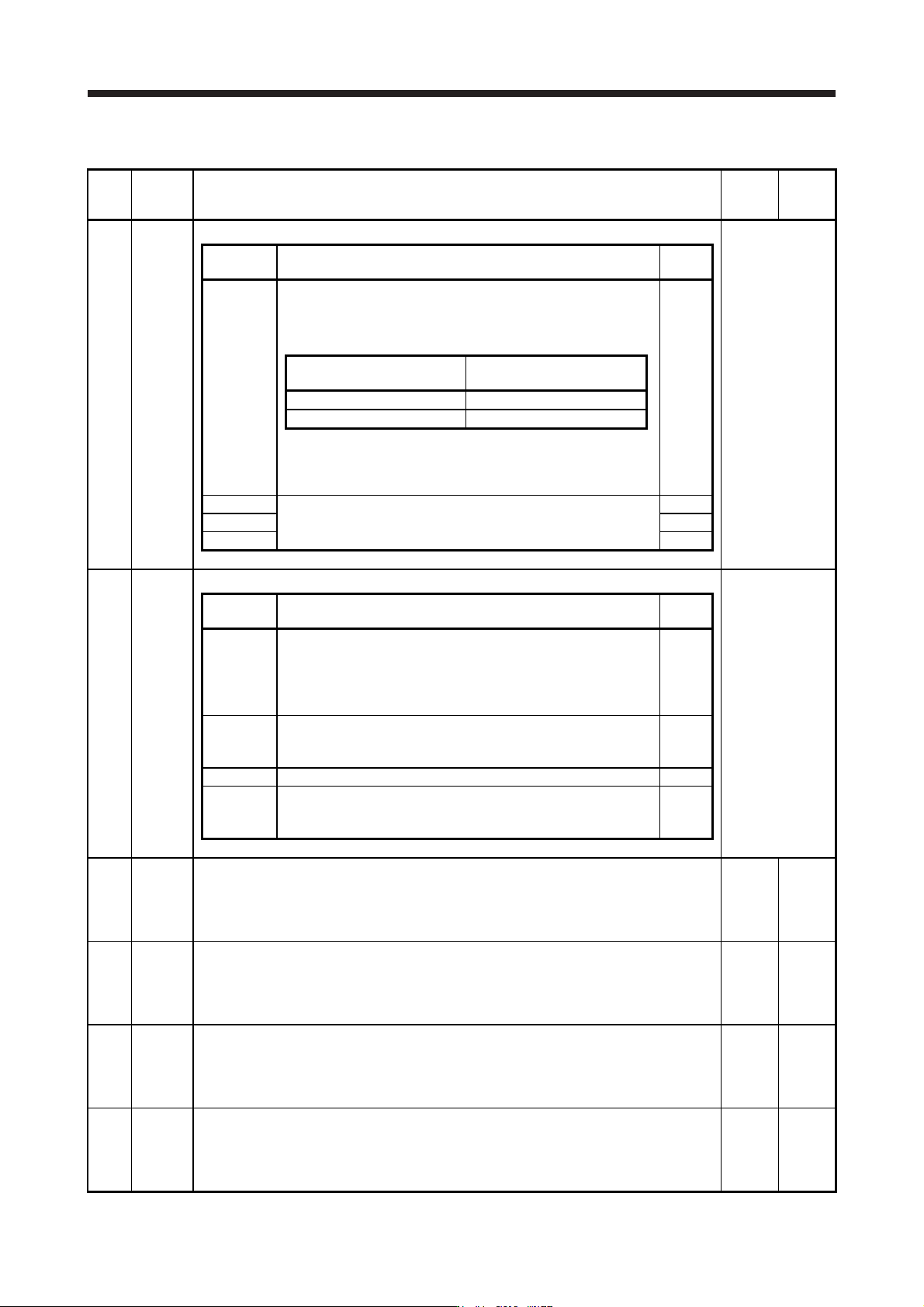
PE01 **FCT1 Fully closed loop function selection 1
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Fully closed loop function selection
0: Always enabled
1: Switching with the control command of controller
(switching semi./full.)
0h
Switching with the control
command of controller
Control method
Off Semi closed loop control
On Fully closed loop control
To enable the digit, select "Fully closed loop control mode (_ _ 1 _)"
of "operation mode selection" in [Pr. PA01].
When "Absolute position detection system selection" is "Enabled (_
_ _ 1)" in [Pr. PA03], setting "1" will trigger [AL. 37 Parameter error].
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _ 0h
PE03 *FCT2 Fully closed loop function selection 2
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Fully closed loop control error detection function selection
0: Disabled
1: Speed deviation error detection
2: Position deviation error detection
3: Speed deviation error/position deviation error detection
3h
_ _ x _ Position deviation error detection system selection
0: Continuous detection system
1: Detection system at stop (detected with command set to "0")
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ Fully closed loop control error reset selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
0h
PE04 **FBN Fully closed loop control - Feedback pulse electronic gear 1 - Numerator
This is used to set a numerator of electronic gear for the servo motor encoder pulse at the
fully closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor
revolution is converted to the resolution of the load-side encoder.
1
1 to
65535
PE05 **FBD Fully closed loop control - Feedback pulse electronic gear 1 - Denominator
This is used to set a denominator of electronic gear for the servo motor encoder pulse at the
fully closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor
revolution is converted to the resolution of the load-side encoder.
1
1 to
65535
PE06 BC1 Fully closed loop control - Speed deviation error detection level
This is used to set [AL. 42.9 Fully closed loop control error by speed deviation] of the fully
closed loop control error detection.
When the speed deviation between the servo motor encoder and load-side encoder becomes
larger than the setting value, the alarm will occur.
400
[r/min]
1 to
50000
PE07 BC2 Fully closed loop control - Position deviation error detection level
This is used to set [AL. 42.8 Fully closed loop control error by position deviation] of the fully
closed loop control error detection.
When the position deviation between the servo motor encoder and load-side encoder
becomes larger than the setting value, the alarm will occur.
100
[kpulse]
1 to
20000