sh030106u.pdf - 第663页
APPENDIX App. - 32 App. 10. 4 Maxim um curren t comm and (maxim um tor que) for ana log m onitor ±8 V Values of the max imum cur rent c ommand ( maximu m torque) when the ana log mo nitor is ±8 V ar e liste d. The curren…
APPENDIX
App. - 31
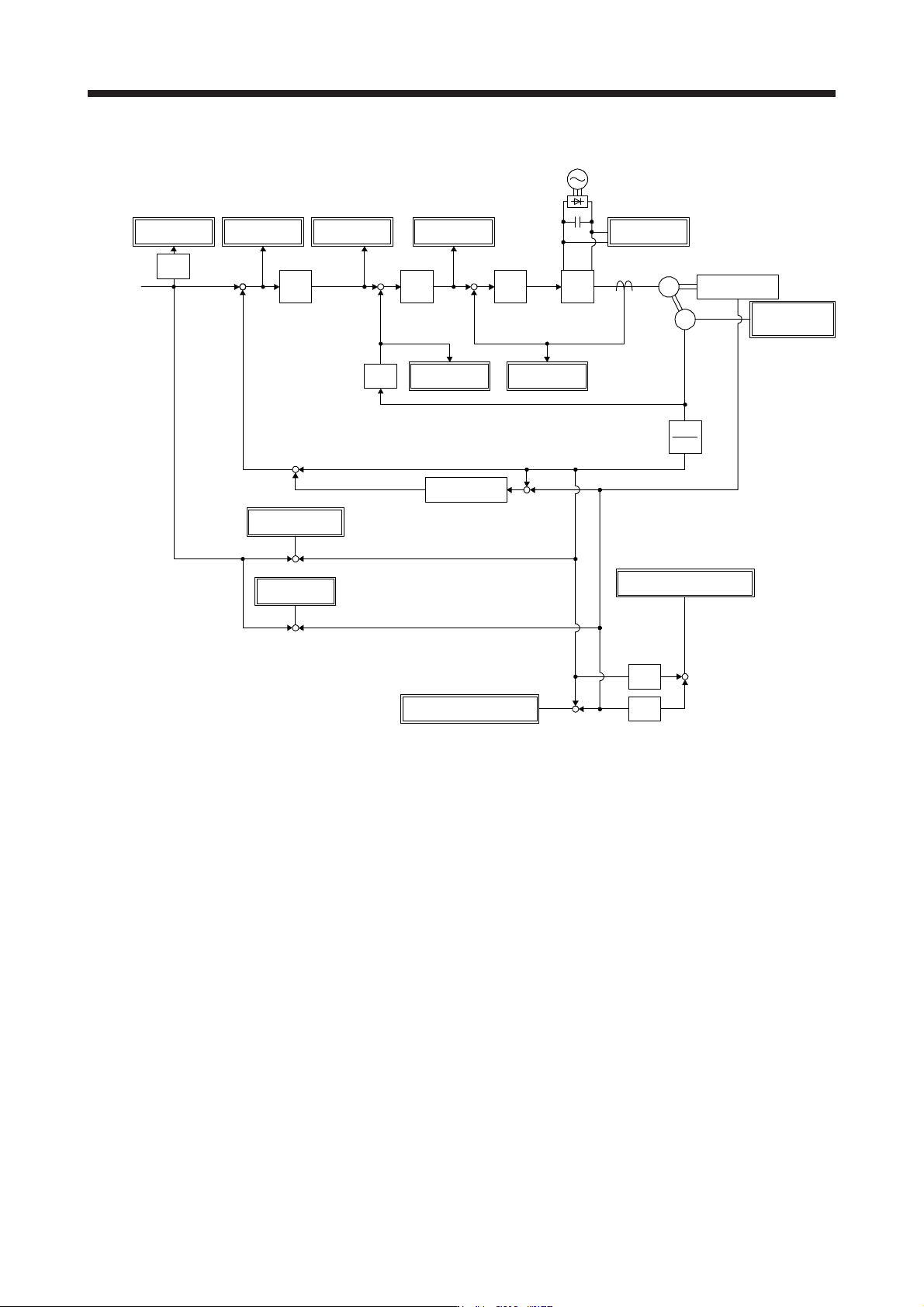
App. 10.3.2 Fully closed loop control
FBN
FBD
Droop pulses
Speed
command
Position
control
Speed
control
PWM
Current
control
Current
command
Bus voltage
Speed
command
Current
encoder
+
Servo
motor
Encoder
Current feedback
Position feedback
M
Position
command
Differ-
entiation
Differ-
entiation
Dual filter
Servo motor-side
droop pulses
Load-side
droop pulses
Servo motor-side/load-side
position deviation
+
-
Load-side
encoder
Internal
temperature
of encoder
Fully closed loop
+-
+
-
Differen-
tiation
Differen-
tiation
Servo motor-side/load-side
speed deviation
+
-
+
+
Semi closed loop
+-
Servo motor
speed
Torque
Servo motor-side feedback pulses
(load-side encoder resolution unit)
Load-side feedback pulses
+
+
-
-
+
-
Speed
command 2
APPENDIX
App. - 32
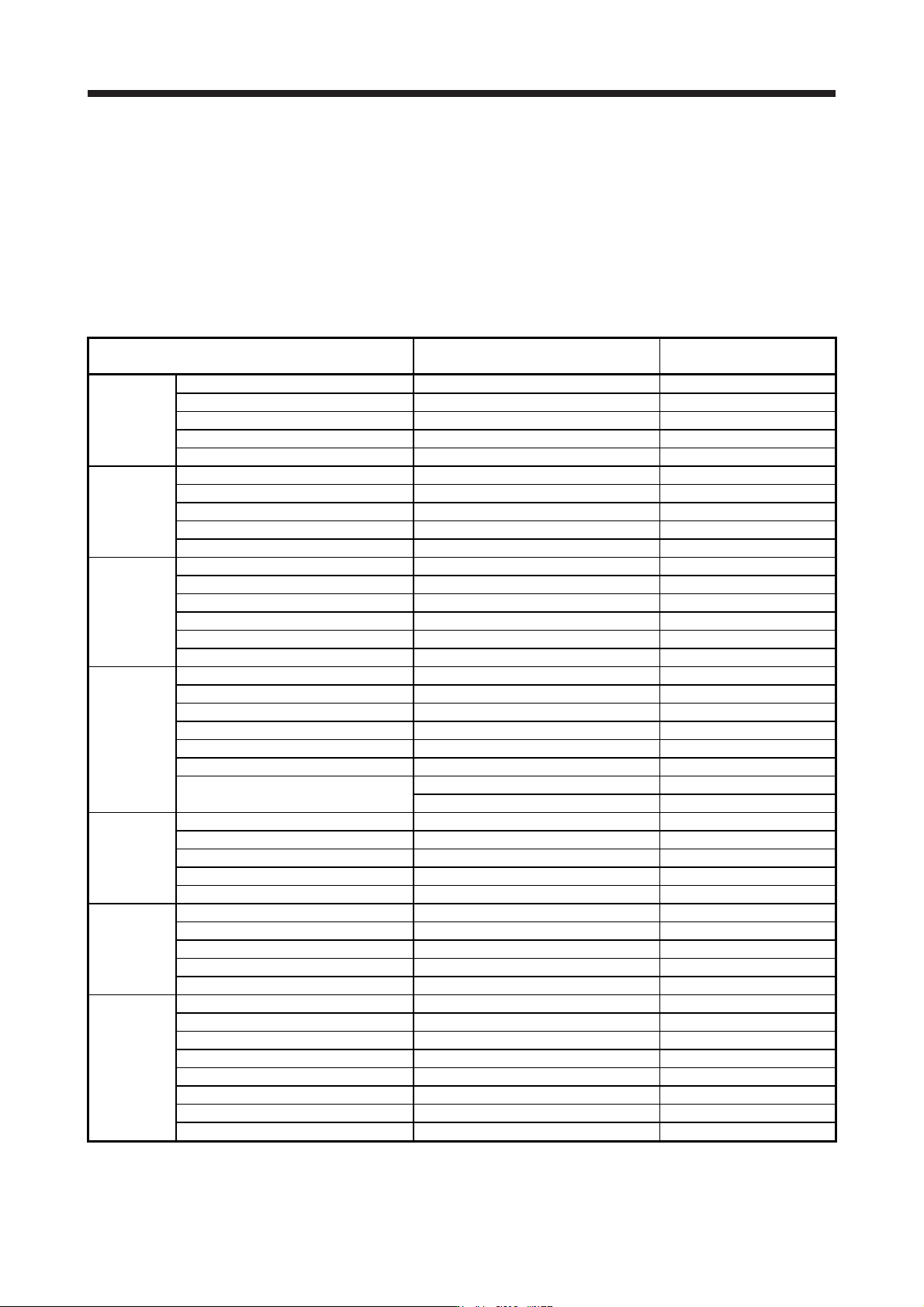
App. 10.4 Maximum current command (maximum torque) for analog monitor ±8 V
Values of the maximum current command (maximum torque) when the analog monitor is ±8 V are listed.
The current command (torque) outputs the maximum current command (maximum torque) at ±8 V. The
maximum current command (maximum torque) may not match the rated current/maximum current ratio since
it is created from the torque current in the servo amplifier.
App. 10.4.1 Rotary servo motor
(1) 200 V/100 V class
Servo motor Servo amplifier/drive unit
Maximum current command
(maximum torque) [%]
HG-KR series
HG-KR053 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 370
HG-KR13 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 373
HG-KR23 MR-J4-20_(-RJ)/MR-J4-20_1(-RJ) 387
HG-KR43 MR-J4-40_(-RJ)/MR-J4-40_1(-RJ) 383
HG-KR73 MR-J4-70_(-RJ) 367
HG-MR series
HG-MR053 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 342
HG-MR13 MR-J4-10_(-RJ)/MR-J4-10_1(-RJ) 336
HG-MR23 MR-J4-20_(-RJ)/MR-J4-20_1(-RJ) 396
HG-MR43 MR-J4-40_(-RJ)/MR-J4-40_1(-RJ) 361
HG-MR73 MR-J4-70_(-RJ) 345
HG-SR 1000
r/min series
HG-SR51 MR-J4-60_(-RJ) 311
HG-SR81 MR-J4-100_(-RJ) 329
HG-SR121 MR-J4-200_(-RJ) 353
HG-SR201 MR-J4-200_(-RJ) 334
HG-SR301 MR-J4-350_(-RJ) 366
HG-SR421 MR-J4-500_(-RJ) 347
HG-SR 2000
r/min series
HG-SR52 MR-J4-60_(-RJ) 302
HG-SR102 MR-J4-100_(-RJ) 310
HG-SR152 MR-J4-200_(-RJ) 320
HG-SR202 MR-J4-200_(-RJ) 327
HG-SR352 MR-J4-350_(-RJ) 332
HG-SR502 MR-J4-500_(-RJ) 341
HG-SR702
MR-J4-700_(-RJ) 336
MR-J4-DU900_(-RJ) 446
HG-UR series
HG-UR72 MR-J4-70_(-RJ) 355
HG-UR152 MR-J4-200_(-RJ) 340
HG-UR202 MR-J4-350_(-RJ) 350
HG-UR352 MR-J4-500_(-RJ) 320
HG-UR502 MR-J4-500_(-RJ) 330
HG-RR series
HG-RR103 MR-J4-200_(-RJ) 300
HG-RR153 MR-J4-200_(-RJ) 250
HG-RR203 MR-J4-350_(-RJ) 290
HG-RR353 MR-J4-500_(-RJ) 270
HG-RR503 MR-J4-500_(-RJ) 270
HG-JR 1000
r/min series
HG-JR601 MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 337
HG-JR801 MR-J4-11K_(-RJ)/MR-J4-DU900_(-RJ) 366
HG-JR12K1 MR-J4-11K_(-RJ)/MR-J4-DU11K_(-RJ) 346
HG-JR15K1 MR-J4-15K_(-RJ)/MR-J4-DU15K_(-RJ) 339
HG-JR20K1 MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ) 337
HG-JR25K1 MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ) 330
HG-JR30K1 MR-J4-DU30K_(-RJ) 330
HG-JR37K1 MR-J4-DU37K_(-RJ) 330
APPENDIX
App. - 33
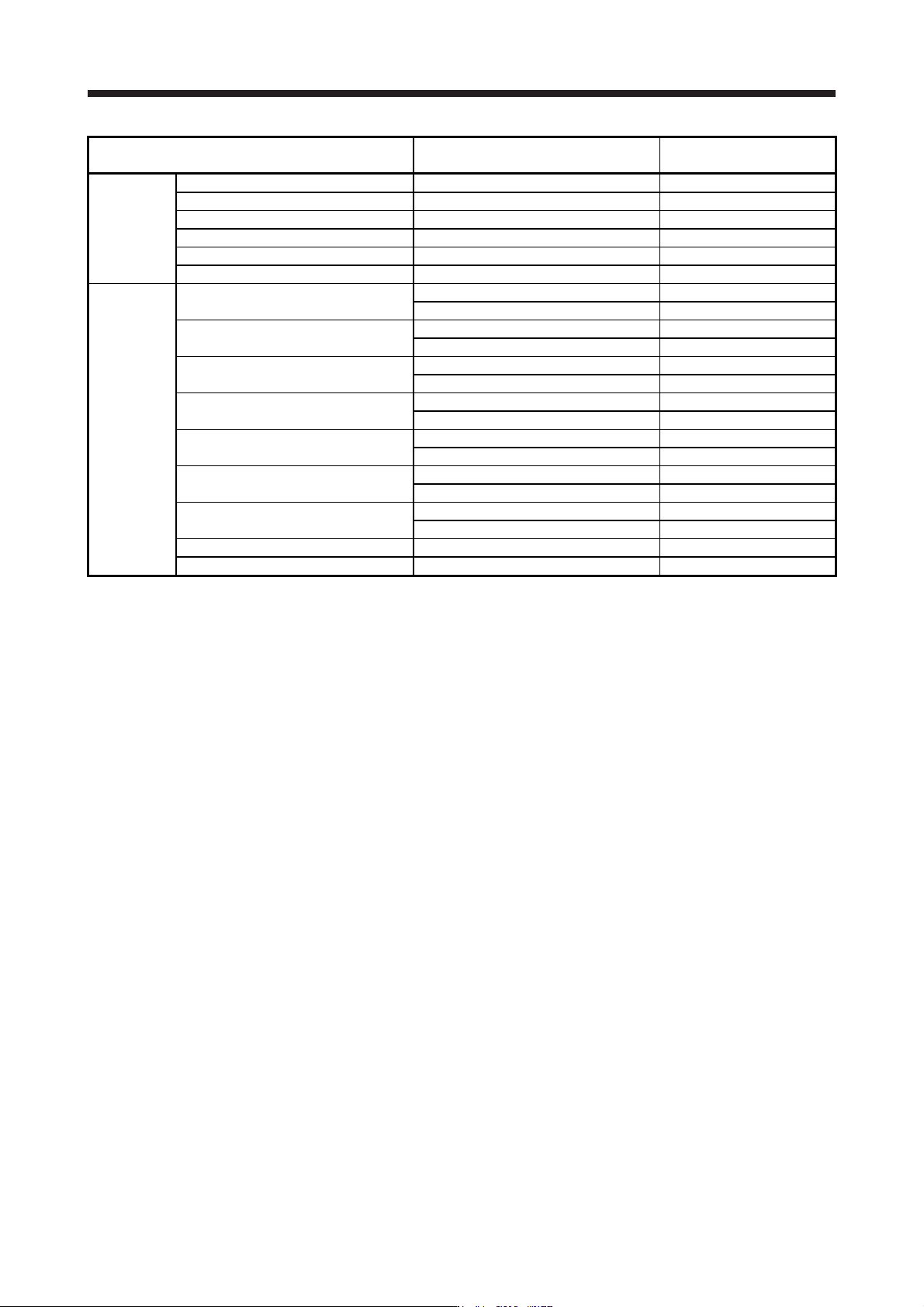
Servo motor Servo amplifier/drive unit
Maximum current command
(maximum torque) [%]
HG-JR 1500
r/min series
HG-JR701M MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 326
HG-JR11K1M MR-J4-11K_(-RJ)/MR-J4-DU11K_(-RJ) 335
HG-JR15K1M MR-J4-15K_(-RJ)/MR-J4-DU15K_(-RJ) 334
HG-JR22K1M MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ) 317
HG-JR30K1M MR-J4-DU30K_(-RJ) 342
HG-JR37K1M MR-J4-DU37K_(-RJ) 365
HG-JR 3000
r/min series
HG-JR53
MR-J4-60_(-RJ) 341
MR-J4-100_(-RJ) 460
HG-JR73
MR-J4-70_(-RJ) 331
MR-J4-200_(-RJ) 460
HG-JR103
MR-J4-100_(-RJ) 341
MR-J4-200_(-RJ) 460
HG-JR153
MR-J4-200_(-RJ) 320
MR-J4-350_(-RJ) 460
HG-JR203
MR-J4-200_(-RJ) 320
MR-J4-350_(-RJ) 460
HG-JR353
MR-J4-350_(-RJ) 307
MR-J4-500_(-RJ) 464
HG-JR503
MR-J4-500_(-RJ) 342
MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 430
HG-JR703 MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 341
HG-JR903 MR-J4-11K_(-RJ)/MR-J4-DU900_(-RJ) 352