sh030106u.pdf - 第143页
4. STA RTUP 4 - 18 4.5.2 Mot or-less operati on in c ontroller POINT Use motor -less oper ation w hich is avai lable by making the serv o system controller s ervo par ameter settin g. Connect the servo system controll er…
4. STARTUP
4 - 17
(2) Operation procedure
1) Turn off the power.
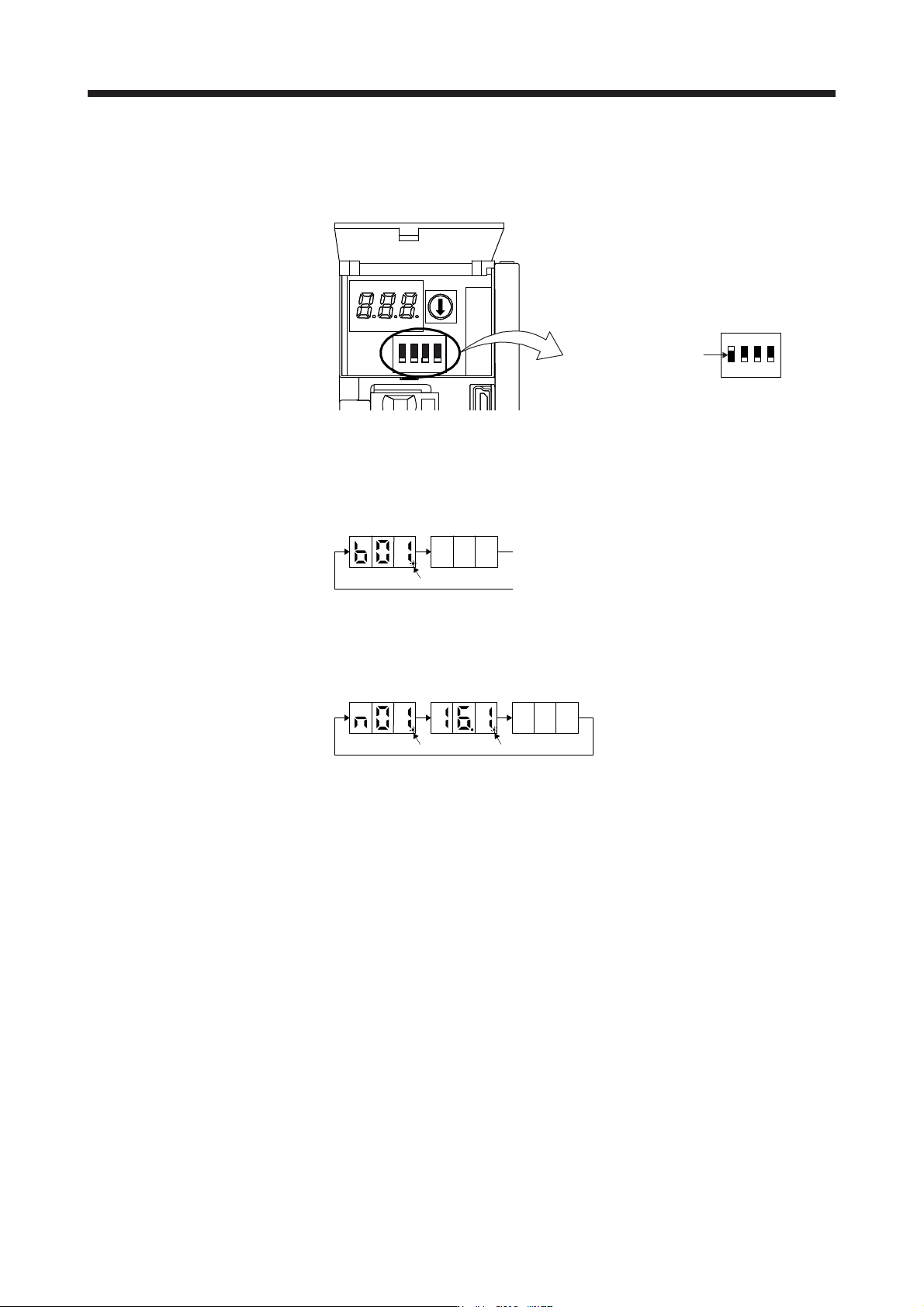
2) Turn "ON (up)" SW2-1.
Set SW2-1 to "ON (up)".
ON
1234
1
ON
2 3 4
Turning "ON (up)" SW2-1 during power-on will not start the test operation mode.
3) Turn on the servo amplifier.
When initialization is completed, the decimal point on the first digit will blink.
After 1.6 s
After 0.2 s
Blinking
When an alarm or warning also occurs during the test operation, the decimal point on the first
digit will blink as follows.
After 0.8 s After 0.8 s
After 0.2 s
Blinking Blinking
4) Start operation with the personal computer.
4. STARTUP
4 - 18
4.5.2 Motor-less operation in controller
POINT
Use motor-less operation which is available by making the servo system
controller servo parameter setting.
Connect the servo system controller to the servo amplifier before the motor-less
operation.
The motor-less operation is not used in the fully closed loop control mode, linear
servo motor control mode, and DD motor control mode.
(1) Motor-less operation
Without connecting the servo motor to the servo amplifier, output signals or status displays can be
provided in response to the servo system controller commands as if the servo motor is actually running.
This operation may be used to check the servo system controller sequence. Use this operation with the
forced stop reset. Use this operation with the servo amplifier connected to the servo system controller.
To stop the motor-less operation, set the motor-less operation selection to "Disable" in the servo
parameter setting of the servo system controller. When the power supply is turned on next time, motor-
less operation will be disabled.
(a) Load conditions
Load item Condition
Load torque 0
Load to motor inertia ratio [Pr. PB06 Load to motor inertia ratio/load to motor mass ratio]
(b) Alarms
The following alarms and warning do not occur. However, the other alarms and warnings occur as
when the servo motor is connected.
[AL. 16 Encoder initial communication error 1]
[AL. 1E Encoder initial communication error 2]
[AL. 1F Encoder initial communication error 3]
[AL. 20 Encoder normal communication error 1]
[AL. 21 Encoder normal communication error 2]
[AL. 25 Absolute position erased]
[AL. 92 Battery cable disconnection warning]
[AL. 9F Battery warning]
4. STARTUP
4 - 19
(2) Operation procedure
1) Set the servo amplifier to the servo-off status.
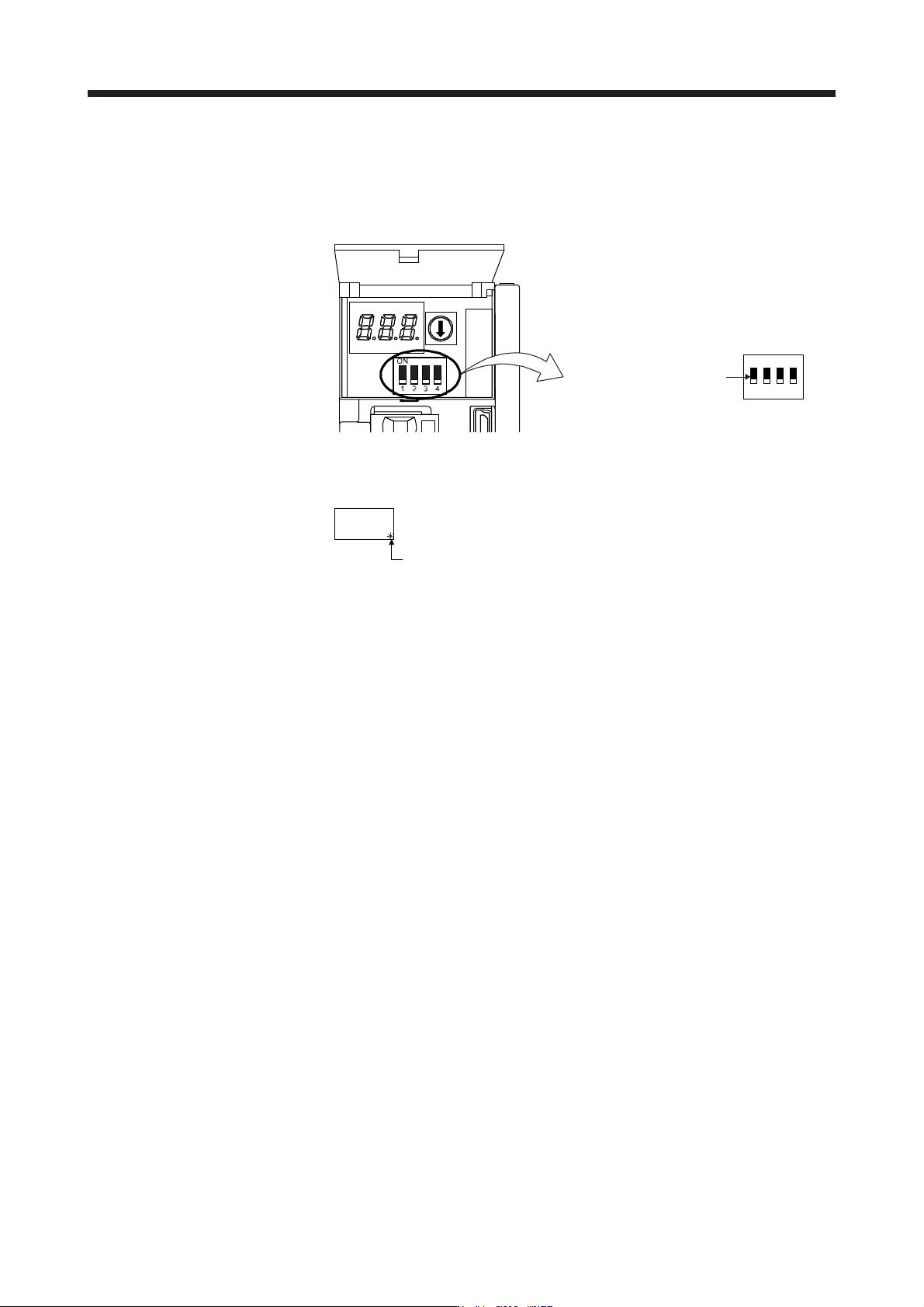
2) Set [Pr. PC05] to "_ _ _ 1", turn "OFF (down: normal condition side)" the test operation mode
switch (SW2-1), and then turn on the power supply.
Set SW2-1 to "OFF (down)".
1
ON
2 3 4
3) Start the motor-less operation with the servo system controller.
The display shows the following screen.
The decimal point blinks.