sh030106u.pdf - 第577页
17. APPLICATIO N OF FUNCTIONS 17 - 26 (4) One-touch t uning POINT After the one-touc h tuning is completed, "Gain adjustm ent mode select ion" in [Pr. PA0 8] will b e set t o "2 gai n adjustm ent mo de 2 (…
17. APPLICATION OF FUNCTIONS
17 - 25
No. Symbol Name and function
Initial
value
[unit]
Setting
range
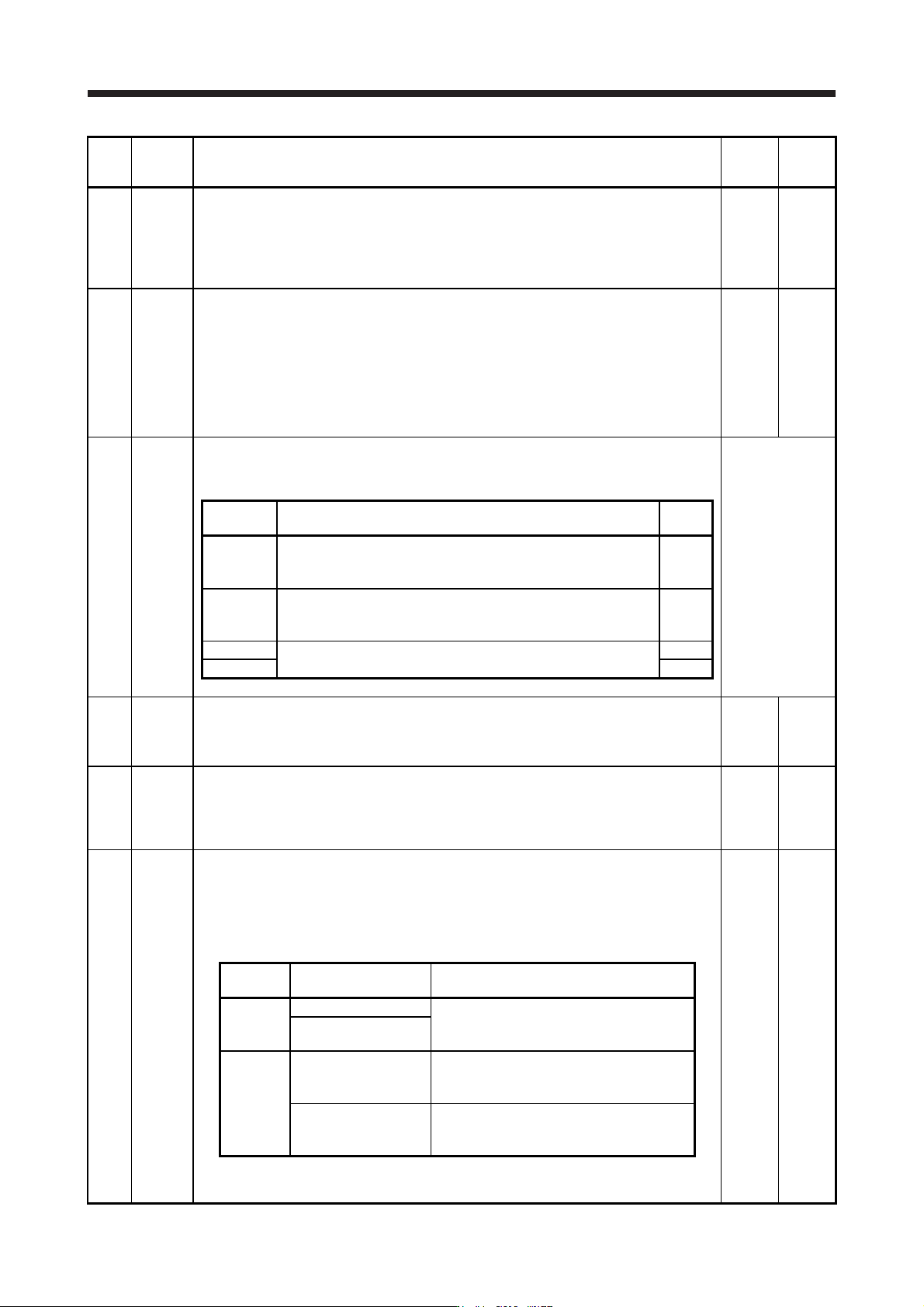
PX38 LMFLT Lost motion filter setting
Set the time constant of the lost motion compensation filter in increments of 0.1 ms.
If the time constant is "0", the torque is compensated with the value set in [Pr. PX36] and [Pr.
PX37]. If the time constant is other than "0", the torque is compensated with the high-pass
filter output value of the set time constant, and the lost motion compensation will continue.
This parameter is supported with software version B4 or later.
0
[0.1 ms]
0
to
30000
PX39 TOF Torque offset
Set this when canceling unbalanced torque of vertical axis. Set this assuming the rated torque
of the servo motor as 100%.
The torque offset does not need to be set for a machine not generating unbalanced torque.
The torque offset cannot be used for linear servo motors and direct drive motors. Set 0.00%.
The torque offset set with this parameter will be enabled in the position control mode, speed
control mode, and torque control mode. Input commands assuming torque offset for the
torque control mode.
This parameter is supported with software version B4 or later.
0
[0.01%]
-10000
to
10000
PX40 *LMOP Lost motion compensation function selection
Select the lost motion compensation function.
This parameter is supported with software version B4 or later.
Refer to the
"Name and
function" column.
Setting
value
Explanation
Initial
value
_ _ _ x Lost motion compensation selection
0: Disabled
1: Enabled
0h
_ _ x _ Unit setting of lost motion compensation non-sensitive band
0: 1 pulse unit
1: 1 kpulse unit
0h
_ x _ _ For manufacturer setting 0h
x _ _ _ 0h
PX41 LMCD Lost motion compensation timing
Set the lost motion compensation timing in increments of 0.1 ms.
You can delay the timing to perform the lost motion compensation for the set time.
This parameter is supported with software version B4 or later.
0
[0.1 ms]
0
to
30000
PX42 LMCT Lost motion compensation non-sensitive band
Set the lost motion compensation non-sensitive band. When the fluctuation of the droop pulse
is the setting value or less, the speed will be 0. Setting can be changed in [Pr. PX40]. Set the
parameter per encoder unit.
This parameter is supported with software version B4 or later.
0
[pulse]/
[kpulse]
0
to
65535
PX43 **STOD STO diagnosis error detection time
Set the time from when an error occurs in the STO input signal or STO circuit until the
detection of [AL. 68.1 Mismatched STO signal error].
When 0 s is set, the detection of [AL. 68.1 Mismatched STO signal error] is not performed.
The following shows safety levels at the time of parameter setting.
0
[s]
0
to
60
Setting
value
STO input diagnosis by
TOFB output
Safety level
0
Execute EN ISO 13849-1:2015 Category 3 PL d,
IEC 61508 SIL 2,
EN IEC 62061 maximum SIL 2
Not execute
1 to 60
Execute
EN ISO 13849-1:2015 Category 3 PL e,
IEC 61508 SIL 3,
EN IEC 62061 maximum SIL 3
Not execute
EN ISO 13849-1:2015 Category 3 PL d,
IEC 61508 SIL 2,
EN IEC 62061 maximum SIL 2
When the short-circuit connector is connected to the CN8 connector, set "0" in the parameter.
This parameter is available with servo amplifiers with software version C1 or later.
17. APPLICATION OF FUNCTIONS
17 - 26
(4) One-touch tuning
POINT
After the one-touch tuning is completed, "Gain adjustment mode selection" in
[Pr. PA08] will be set to "2 gain adjustment mode 2 (_ _ _ 4)". To estimate [Pr.
PB06 Load to motor inertia ratio/load to motor mass ratio] again, set "Gain
adjustment mode selection" in [Pr. PA08] to "Auto tuning mode 1 (_ _ _ 1)".
When executing the one-touch tuning, check the [Pr. PX13 One-touch tuning
function selection] is "_ _ _ 1" (initial value).
At start of the one-touch tuning, only when "Auto tuning mode 1 (_ _ _ 1)" or "2
gain adjustment mode 1 (interpolation mode) (_ _ _ 0)" of "Gain adjustment
mode selection" is selected in [Pr. PA08], [Pr. PB06 Load to motor inertia
ratio/load to motor mass ratio] will be estimated.
Execute the one-touch tuning while the servo system controller and the servo
amplifier are connected.
When executing the one-touch tuning in the test operation mode (SW2-1 is on),
write the tuning result to servo parameters of the servo system controller, and
then connect the servo system controller and the servo amplifier.
The amplifier command method can be used with the servo amplifier with
software version C1 or later and MR Configurator2 with software version 1.45X
or later.
When the one-touch tuning is executed, MR Configurator2 is required.
The one-touch tuning includes two methods: the user command method and the amplifier command
method.
1) User command method
The user command method performs one-touch tuning by inputting commands from outside the
servo amplifier.
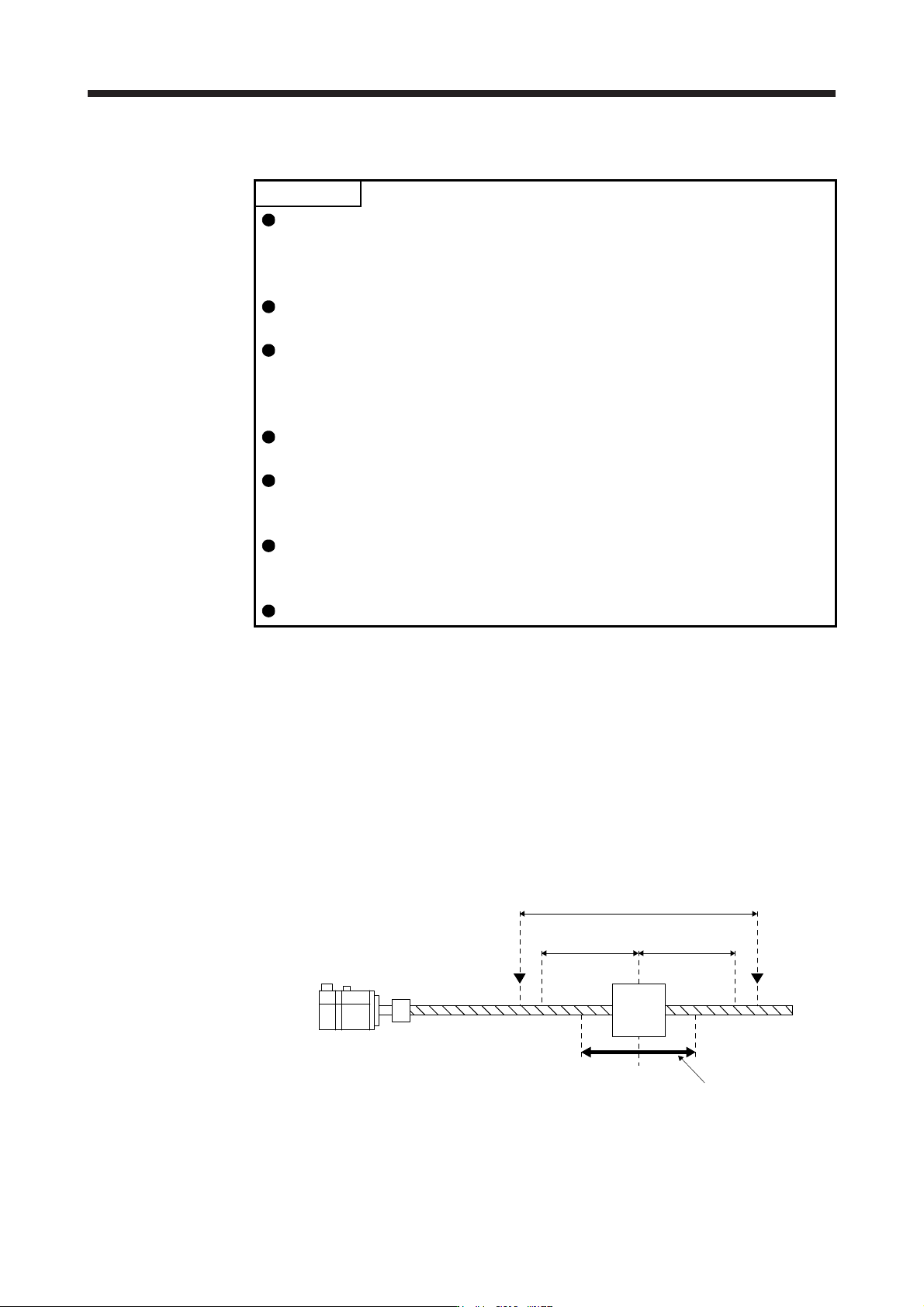
2) Amplifier command method
In the amplifier command method, when you simply input a travel distance (permissible travel
distance) that collision against the equipment does not occur during servo motor driving, a
command for the optimum tuning will be generated inside the servo amplifier to perform one-
touch tuning.
Servo motor
Moving
part
Movable range
Tuning start position
Movable range at tuning
Permissible
travel distance
Limit switch
Permissible
travel distance
Limit switch
17. APPLICATION OF FUNCTIONS
17 - 27
The following parameters are set automatically with one-touch tuning. Also, "Gain adjustment mode
selection" in [Pr. PA08] will be "2 gain adjustment mode 2 (_ _ _ 4)" automatically. Other parameters will
be set to an optimum value depending on the setting of [Pr. PA09 Auto tuning response].
Table 17.5 List of parameters automatically set with one-touch tuning
Parameter Symbol Name Parameter Symbol Name
PA08 ATU Auto tuning mode PB18 LPF Low-pass filter setting
PA09 RSP Auto tuning response
PB19 VRF11
Vibration suppression control 1 -
Vibration frequency
PB01 FILT Adaptive tuning mode (adaptive filter II)
PB02 VRFT
Vibration suppression control tuning
mode (advanced vibration suppression
control II)
PB20 VRF12
Vibration suppression control 1 -
Resonance frequency
PB21 VRF13
Vibration suppression control 1 -
Vibration frequency damping
PB06 GD2 Load to motor inertia ratio
PB07 PG1 Model loop gain
PB22 VRF14
Vibration suppression control 1 -
Resonance frequency damping
PB08 PG2 Position loop gain
PB09 VG2 Speed loop gain PB23 VFBF Low-pass filter selection
PB10 VIC Speed integral compensation PX17 NH3 Machine resonance suppression filter 3
PB12 OVA Overshoot amount compensation PX18 NHQ3 Notch shape selection 3
PB13 NH1 Machine resonance suppression filter 1 PX19 NH4 Machine resonance suppression filter 4
PB14 NHQ1 Notch shape selection 1 PX20 NHQ4 Notch shape selection 4
PB15 NH2 Machine resonance suppression filter 2 PX22 NHQ5 Notch shape selection 5
PB16 NHQ2 Notch shape selection 2 PX31 XOP4 Function selection X-4
PB17 NHF Shaft resonance suppression filter
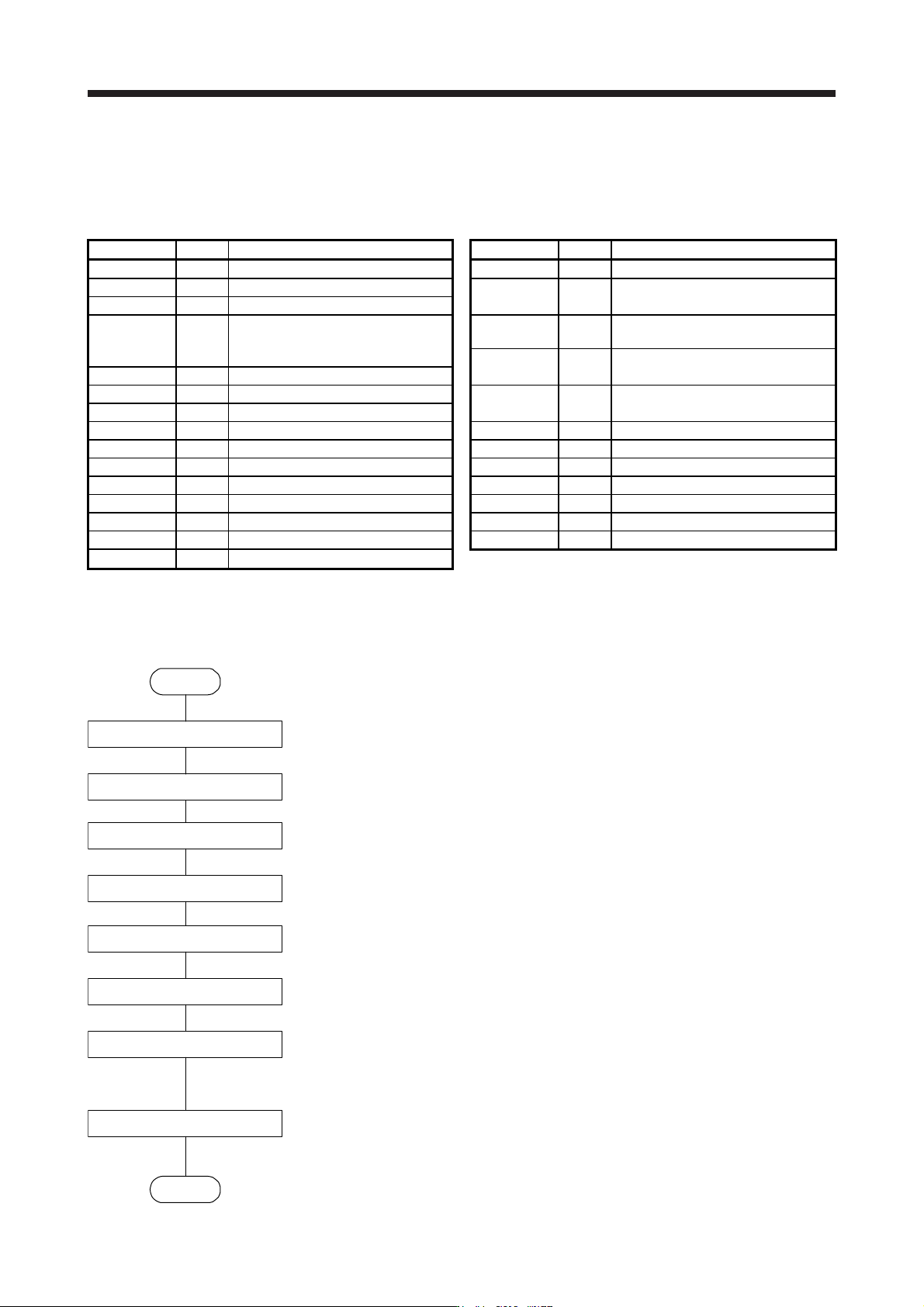
(a) One-touch tuning flowchart
1) User command method
Make one-touch tuning as follows.
Start
Startup of the system
Operation
One-touch tuning start,
mode selection
Response mode selection
One-touch tuning execution
One-touch tuning completion
Tuning result check
One-touch tuning in progress
End
Start a system referring to chapter 4.
Rotate the servo motor by a servo system controller. (In the user command method, the one-
touch tuning cannot be executed if the servo motor is not operating.)
Start one-touch tuning of MR Configurator2, and select "User command method".
Select a response mode (High mode, Basic mode, and Low mode) in the one-touch tuning
window of MR Configurator2.
Click "Start" during servo motor driving to execute one-touch tuning.
Gains and filters will be adjusted automatically. During processing of tuning, the tuning progress
will be displayed in % in MR Configurator2.
When one-touch tuning is completed normally, the parameters described in table 17.5 will be
set automatically.
When the tuning is not completed normally, the tuning error will be displayed. (Refer to (4) (b) 5)
in this section.))
Check the tuning result.
When the tuning result is not satisfactory, you can return the parameter to the value before the
one-touch tuning or the initial value. (Refer to (4) (b) 8) in this section.))