sh030106u.pdf - 第427页
11. OPT I ONS AND PER IPH ERA L EQU IPM ENT 11 - 10 6 (3) T iming char t (a) When using the f orced s top decel eration f unction 1) Ready -off co mmand from contr oller ON OFF ON OFF ON OFF 0 r/min OFF Coasting Dynamic …
11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 105
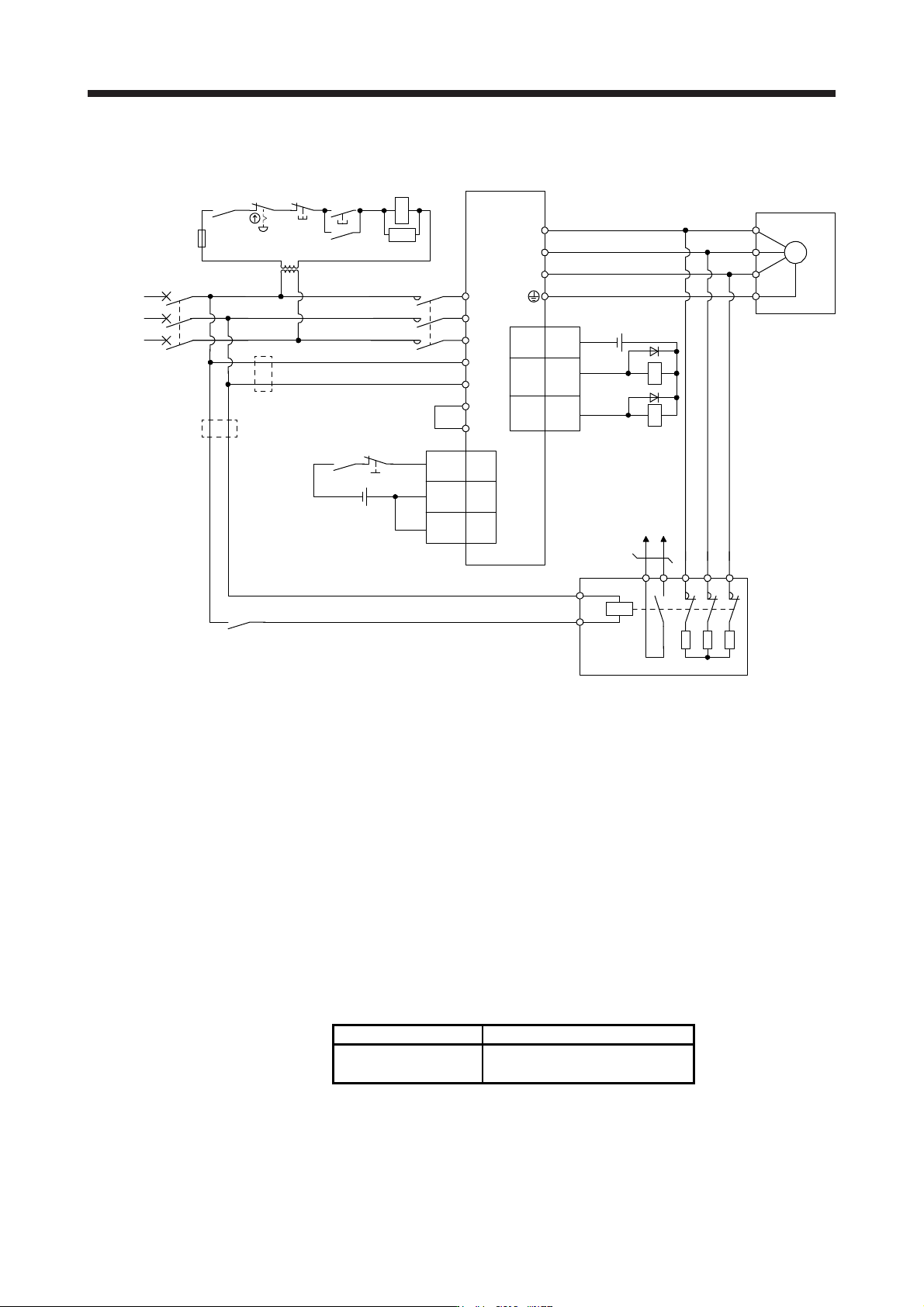
(b) 400
V class
Emergency
stop switch
L11
L21
U
V
W
U
V
W
E
M
Servo amplifier
Servo motor
L3
L2
L1
(Note 3)
Power
supply
13 U14 V W
External dynamic brake
a
b
(Note 1)
ALM15
DB
(Note 2,
10)
DOCOM
3
CN3
RA2
MCCB
Operation ready
MC
ALM
RA1
OFF ON
MC
SK
RA1
RA2
MC
Dynamic brake
interlock
(Note 4)
(Note 5)
Main circuit
power supply
24 V DC (Note 6)
5
DICOM 10
EM2 20
DICOM
CN3
24 V DC (Note 6)
P3
P4
(Note 7)
(Note 8) Step-down
transformer
(Note 9)
(Note 11)
(Note 11)
Note 1. Terminals 13 and 14 are normally open contact outputs. If the external dynamic brake is seized, terminals 13 and 14 will open.
Therefore, confi
g
ure an external sequence to prevent servo-on.
2.
A
ssi
g
n DB
(
D
y
namic brake interlock
)
in [Pr. PD07] to [Pr. PD09].
3. For power suppl
y
specifications, refer to section 1.3.
4. Depending on the main circuit voltage and operation pattern, bus voltage decreases, and that may cause the forced st
op
deceleration to shift to the dynamic brake deceleration. When dynamic brake deceleration is not required, slow the time to turn
o
ff the ma
g
netic contactor.
5. Turn off EM2 when the main power circuit power suppl
y
is off.
6. The illustration of the 24 V DC power supply is divided between input signal and output signal for convenience. However, they
can be confi
g
ured b
y
one.
7. Between P3 and P4 is connected by default. When using the power factor improving DC reactor, remove the short
bar
between P3 and P4. Refer to section 11.11 for details. Additionally, a power factor improving DC reactor and power factor
i
mprovin
g
AC reactor cannot be used simultaneousl
y
.
8. Stepdown transformer is required when the coil volta
g
e of the ma
g
netic contactor is 200 V class.
9. The power supply voltage of the inside magnet contactor for 400 V class external dynamic brake DBU-11K-4 and DBU-22K
-4
is restricted as follows. When usin
g
these external d
y
namic brakes, use them within the ran
g
e of the power suppl
y
.
External dynamic brake Power supply voltage
DBU-11K-4
DBU-22K-4
1-phase 380 V AC to 463 V AC, 50
Hz
/60 Hz
10. The external dynamic brake cannot be used for compliance with SEMI-F47 standard. Do not assign DB (Dynamic brake
interlock) in [Pr. PD07] to [Pr. PD09]. Failure to do so will cause the servo amplifier to become servo-off when
an
instantaneous power failure occurs.
11. Install an overcurrent protection device (molded-case circuit breaker, fuse, or others) to protect the branch circuit. (Refer t
o
section 11.10 and
(
1
)
in this section.
)
11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 106
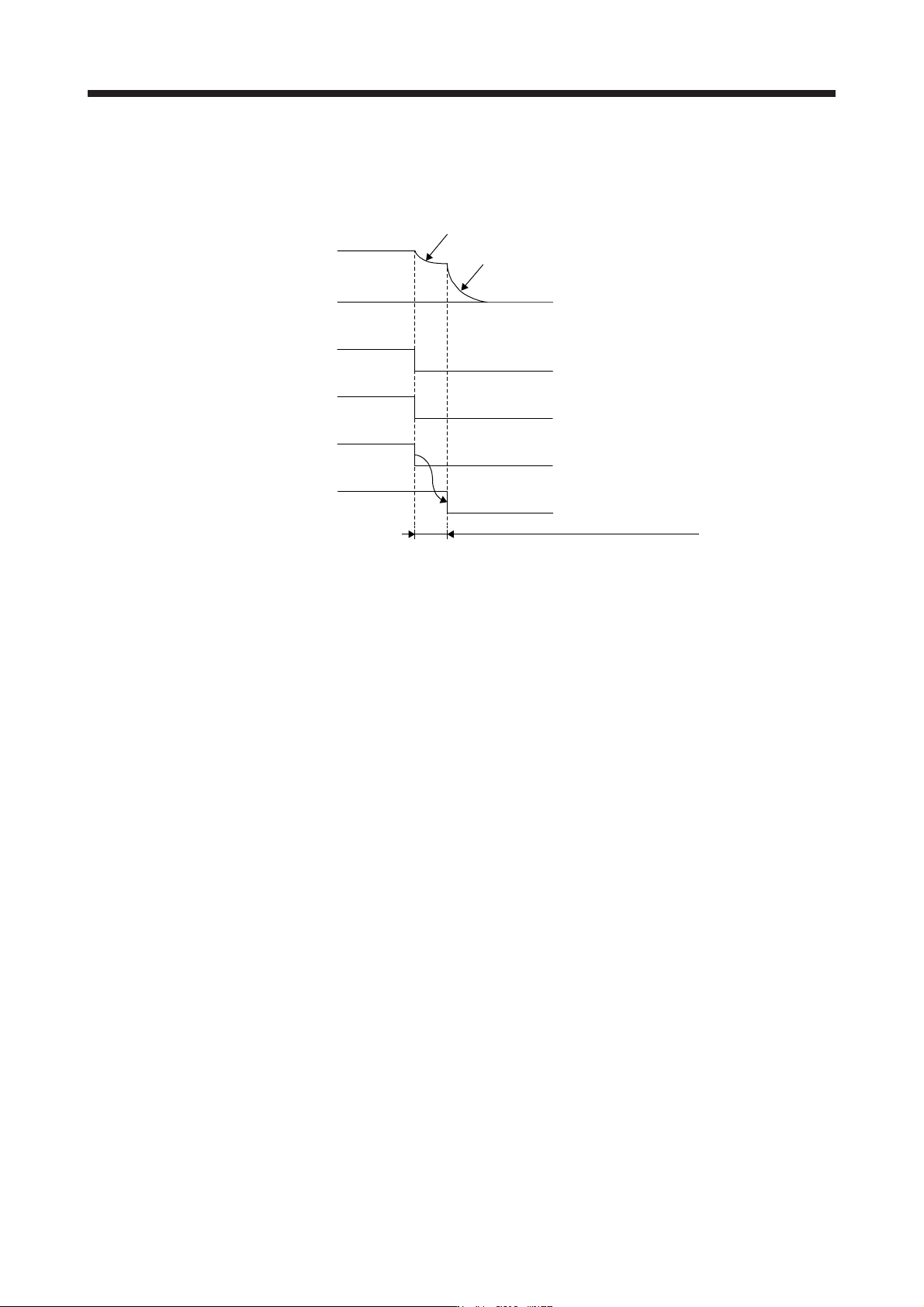
(3) T
iming chart
(a) When using the forced stop deceleration function
1) Ready-off command from controller
ON
OFF
ON
OFF
ON
OFF
0 r/min
OFF
Coasting
Dynamic brake
Servo motor speed
Base circuit
Ready-on command
(from controller)
Release
Activate
DB (Dynamic
brake interlock) (Note 1)
Dynamic brake
Release delay time and external relay, etc. (Note 2)
Note 1. ON: Dynamic brake is not activated
OFF: D
y
namic brake is activated
2. There is delay caused by the magnetic contactor built into the external dynamic brake (about 50 ms) and delay caused by the
external rela
y
.
11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 107
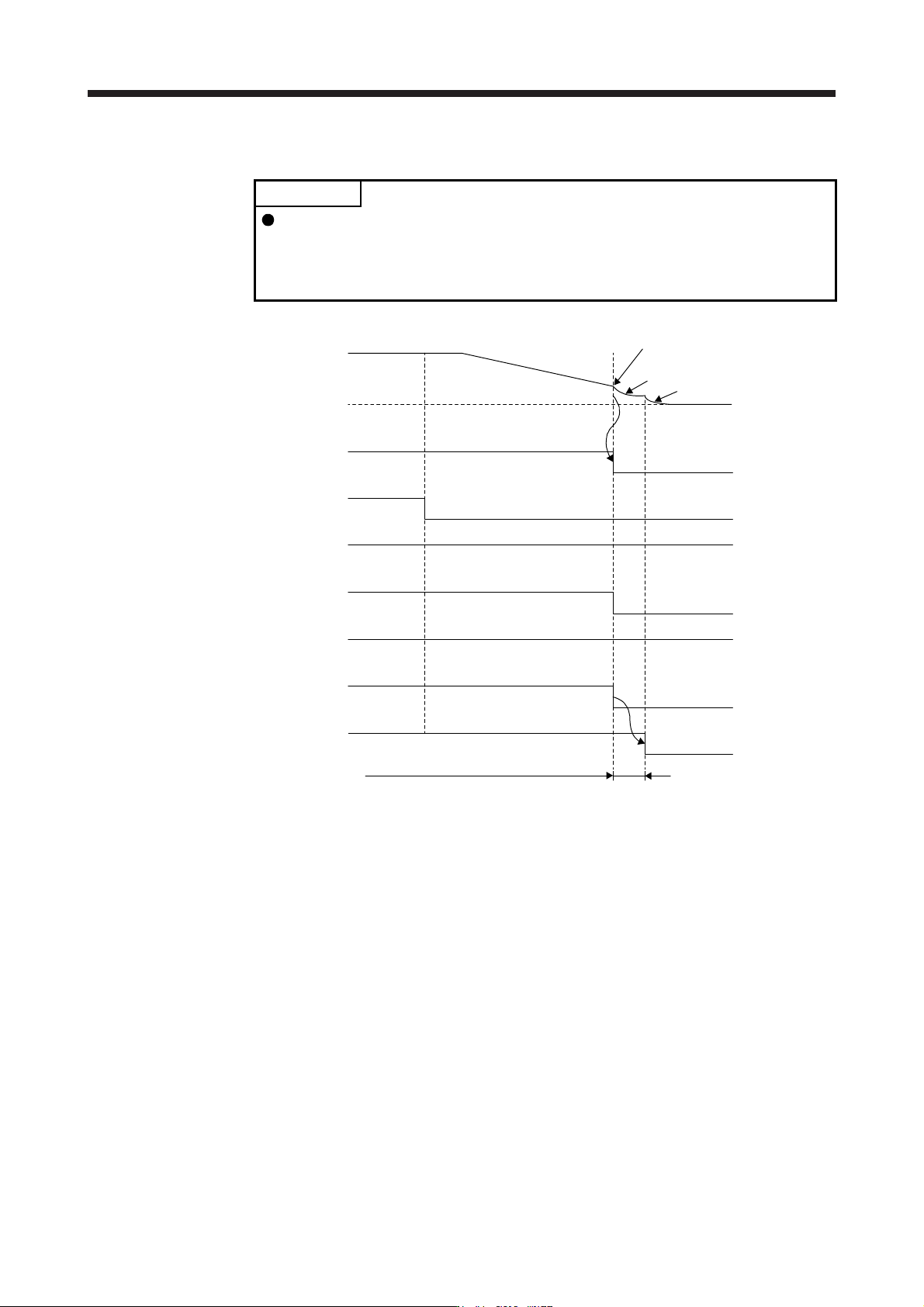
2) Tur
ning the forced stop command (from controller) or EM2 (Forced stop 2) off
POINT
Keep the servo-on command (from controller) and ready-on command (from
controller) on while the forced stop command (from controller) or EM2 (Forced
stop 2) is off. When the servo-on command (from controller) and ready-on
command (from controller) are off, forced stop deceleration is not performed.
ON
OFF
0 r/min
ON
OFF
Base circuit
(Energy supply to
the servo motor)
Servo motor speed
Disabled (ON)
Enabled (OFF)
Release
Activate
ALM
(Malfunction)
Servo-on command
(from controller)
Ready-on command
(from controller)
ON (no alarm)
OFF (alarm)
Coasting
Dynamic brake
Release
Activate
Dynamic brake
Release delay time and external relay, etc. (Note 3)
Model speed command 0 and equal
to or less than zero speed (Note 1)
DB (Dynamic
brake interlock) (Note 2)
Emergency stop command
(from controller) or EM2
(Forced stop 2)
Note 1. The model speed command is a speed command generated in the servo amplifier for forced stop deceleration of the servo
motor.
2. ON: Dynamic brake is not activated
OFF: D
y
namic brake is activated
3. There is delay caused by the magnetic contactor built into the external dynamic brake (about 50 ms) and delay caused by the
external rela
y
.