sh030106u.pdf - 第199页
5. PARAMETE RS 5 - 54 No. Sym bol Name and function Initial value [unit] Setting range PL04 *LI T2 Linear serv o motor/DD motor f unction selection 2 This is us ed to select a detection functi on and detection c ontrolle…
5. PARAMETERS
5 - 53
5.2.7 Linear servo motor/DD motor setting parameters ([Pr. PL_ _ ])
No. Symbol Name and function
Initial
value
[unit]
Setting
range
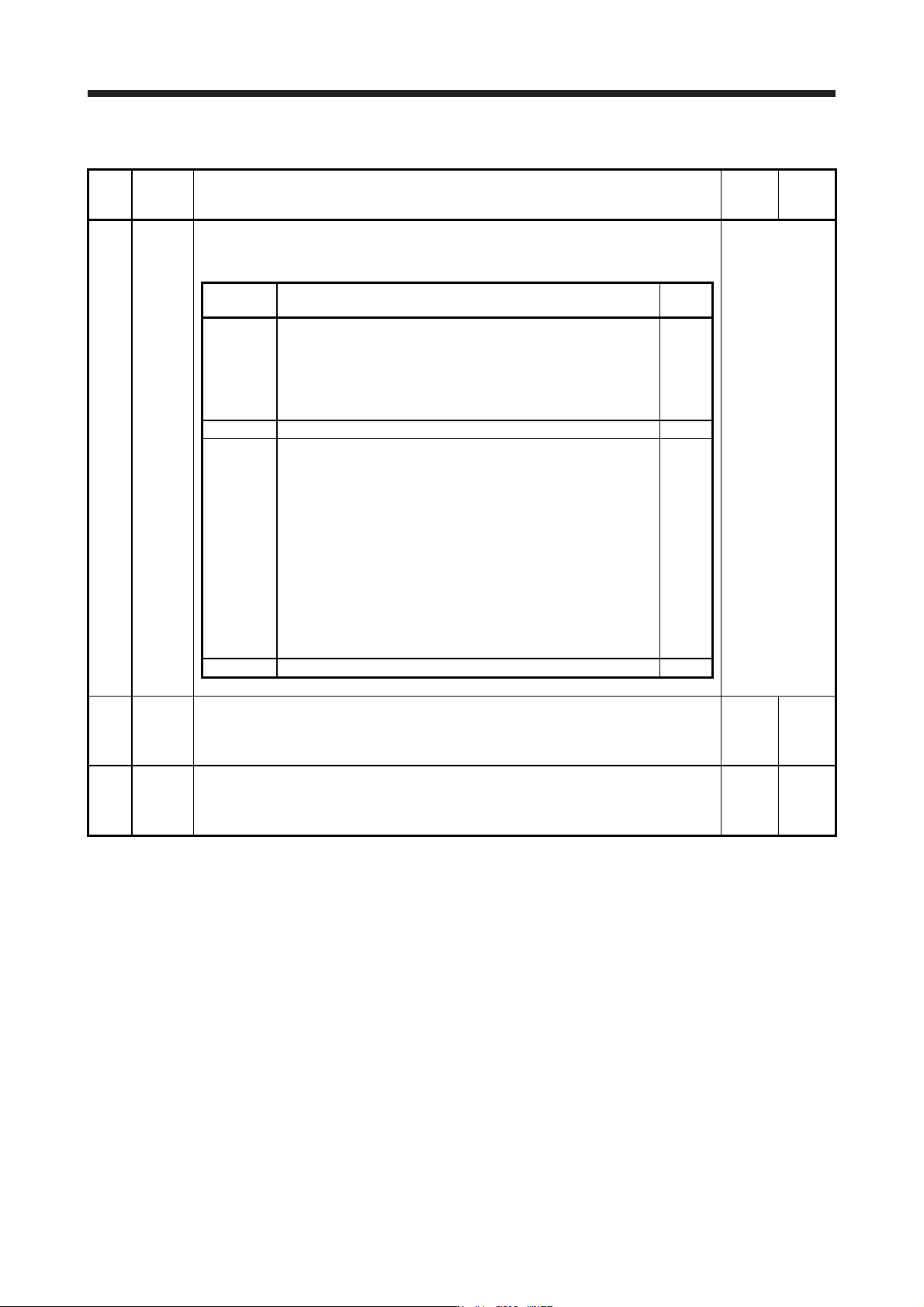
PL01 **LIT1 Linear servo motor/DD motor function selection 1
Select a magnetic pole detection timing of the linear servo motor/DD motor and stop interval
of the home position returning.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x Linear servo motor/DD motor magnetic pole detection selection
The setting value "0" will be enabled only with absolute position
linear encoders.
0: Magnetic pole detection disabled
1: Magnetic pole detection at first servo-on
5: Magnetic pole detection at every servo-on
1h
_ _ x _ For manufacturer setting 0h
_ x _ _ Stop interval selection at the home position return
Set a stop interval of the home position returning.
The digit is enabled only for linear servo motors.
0: 2
13
(= 8192) pulses
1: 2
17
(= 131072) pulses
2: 2
18
(= 262144) pulses
3: 2
20
(= 1048576) pulses
4: 2
22
(= 4194304) pulses
5: 2
24
(= 16777216) pulses
6: 2
26
(= 67108864) pulses
When "Absolute position detection system selection" is "Enabled (_
_ _ 1)" in [Pr. PA03], setting "0" may prevent the absolute position
from being restored properly.
3h
x _ _ _ For manufacturer setting 0h
PL02 **LIM Linear encoder resolution - Numerator
Set a linear encoder resolution with the settings of [Pr. PL02] and [Pr. PL03].
Set the numerator in [Pr. PL02].
This is enabled only for linear servo motors.
1000
[μm]
1 to
65535
PL03 **LID Linear encoder resolution - Denominator
Set a linear encoder resolution with the settings of [Pr. PL02] and [Pr. PL03].
Set the denominator in [Pr. PL03].
This is enabled only for linear servo motors.
1000
[μm]
1 to
65535
5. PARAMETERS
5 - 54
No. Symbol Name and function
Initial
value
[unit]
Setting
range
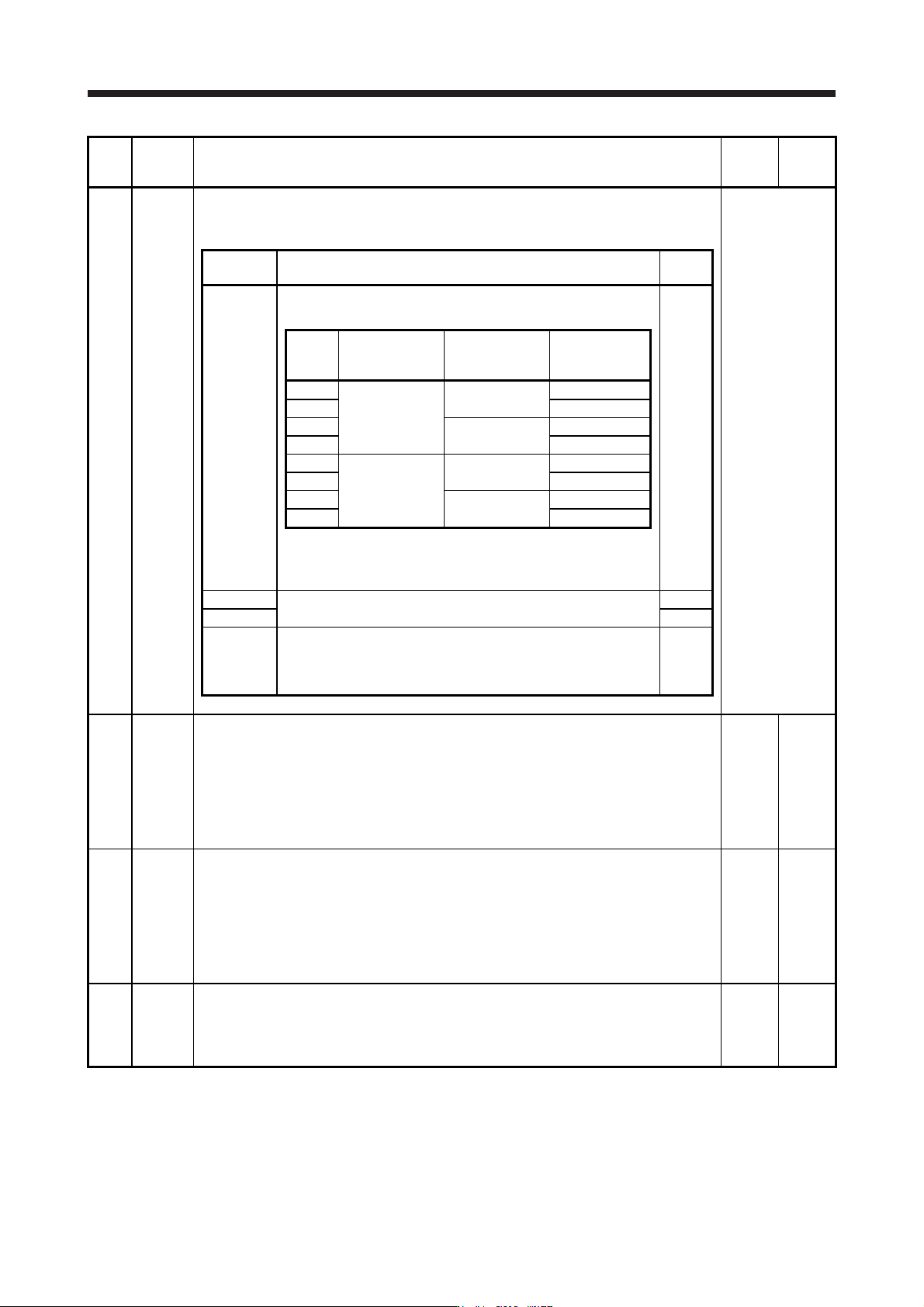
PL04 *LIT2 Linear servo motor/DD motor function selection 2
This is used to select a detection function and detection controller reset condition of [AL. 42
Servo control error].
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
[AL. 42 Servo control error] detection function selection
Refer to the following table.
3h
Setting
value
Torque/thrust
deviation error
(Note)
Speed deviation
error (Note)
Position
deviation error
(Note)
0
Disabled
Disabled
1
Disabled
Enabled
2
Enabled
Disabled
3 Enabled
4
Disabled
Disabled
5
Enabled
Enabled
6
Enabled
Disabled
7 Enabled
Note. Refer to chapter 14 and 15 for details of each deviation
error.
_ _ x _ For manufacturer setting 0h
_ x _ _ 0h
x _ _ _
[AL. 42 Servo control error] detection function controller reset
condition selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
0h
PL05 LB1 Position deviation error detection level
This is used to set the position deviation error detection level of the servo control error
detection.
When the deviation between a model feedback position and actual feedback position is larger
than the setting value, [AL. 42 Servo control error] will occur.
However, when "0" is set, the level vary depending on the operation mode in [Pr. PA01].
Linear servo motor: 50 mm
Direct drive motor: 0.09 rev
0
[mm]/
[0.01 rev]
0 to
1000
PL06 LB2 Speed deviation error detection level
This is used to set the speed deviation error detection level of the servo control error
detection.
When the deviation between a model feedback speed and actual feedback speed is larger
than the setting value, [AL. 42 Servo control error] will occur.
However, when "0" is set, the level vary depending on the operation mode in [Pr. PA01].
Linear servo motor: 1000 mm/s
Direct drive motor: 100 r/min
0
[mm/s]/
[r/min]
0 to
5000
PL07 LB3 Torque/thrust deviation error detection level
This is used to set the torque/thrust deviation error detection level of the servo control error
detection.
When the deviation between a current command and current feedback is larger than the
setting value, [AL. 42.3 Servo control error by torque/thrust deviation] will occur.
100
[%]
0 to
1000
5. PARAMETERS
5 - 55
No. Symbol Name and function
Initial
value
[unit]
Setting
range
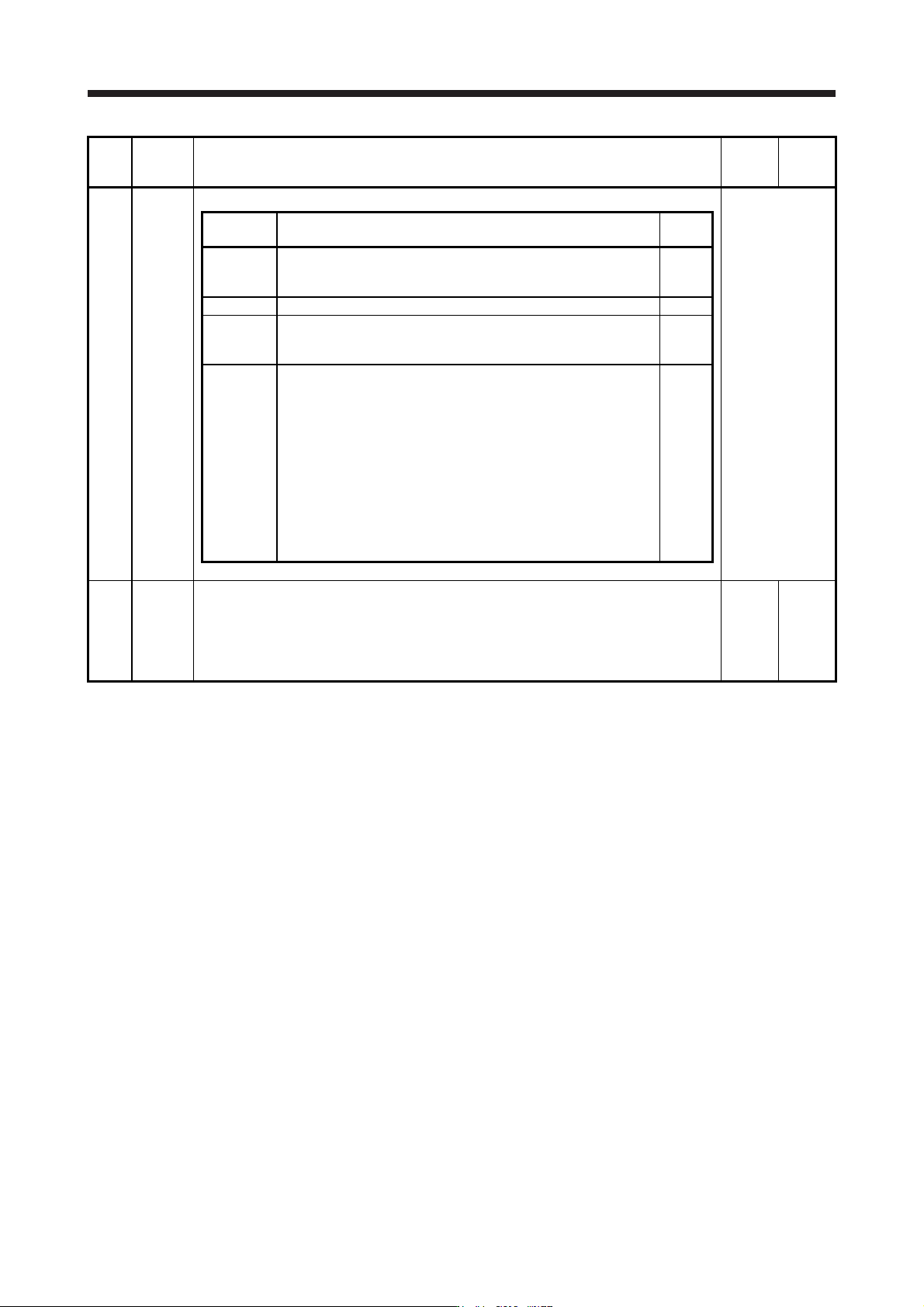
PL08 *LIT3 Linear servo motor/DD motor function selection 3
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Magnetic pole detection method selection
0: Position detection method
4: Minute position detection method
0h
_ _ x _ For manufacturer setting 1h
_ x _ _
Magnetic pole detection - Stroke limit enabled/disabled selection
0: Enabled
1: Disabled
0h
x _ _ _
Minute position detection method - High-resolution encoder
selection
0: Disabled
1: Enabled
This digit will be enabled when "minute position detection method"
is selected in [Pr. PL08 (_ _ _ x)].
If a linear encoder whose resolution is smaller than 0.05 μm is used
and also [AL. 27 Initial magnetic pole detection error] occurs
because the travel distance at magnetic pole detection is too large
or vibration occurs, set "1" (enabled).
This digit is available on servo amplifiers with software version A8
or later.
0h
PL09 LPWM Magnetic pole detection voltage level
This is used to set a direct current exciting voltage level during the magnetic pole detection.
If [AL. 32 Overcurrent], [AL. 50 Overload 1], or [AL. 51 Overload 2] occurs during the magnetic
pole detection, decrease the setting value.
If [AL. 27 Initial magnetic pole detection error] occurs during the magnetic pole detection,
increase the setting value.
30
[%]
0 to 100