sh030106u.pdf - 第535页
16. FULLY CLOSE D L OOP SYS TEM 16 - 10 16.3 Oper ation and funct ions 16.3.1 Star tup (1) Startup proc edure Start up the fully closed loo p system in the followin g procedur e. Positioning operation check using the con…
16. FULLY CLOSED LOOP SYSTEM
16 - 9
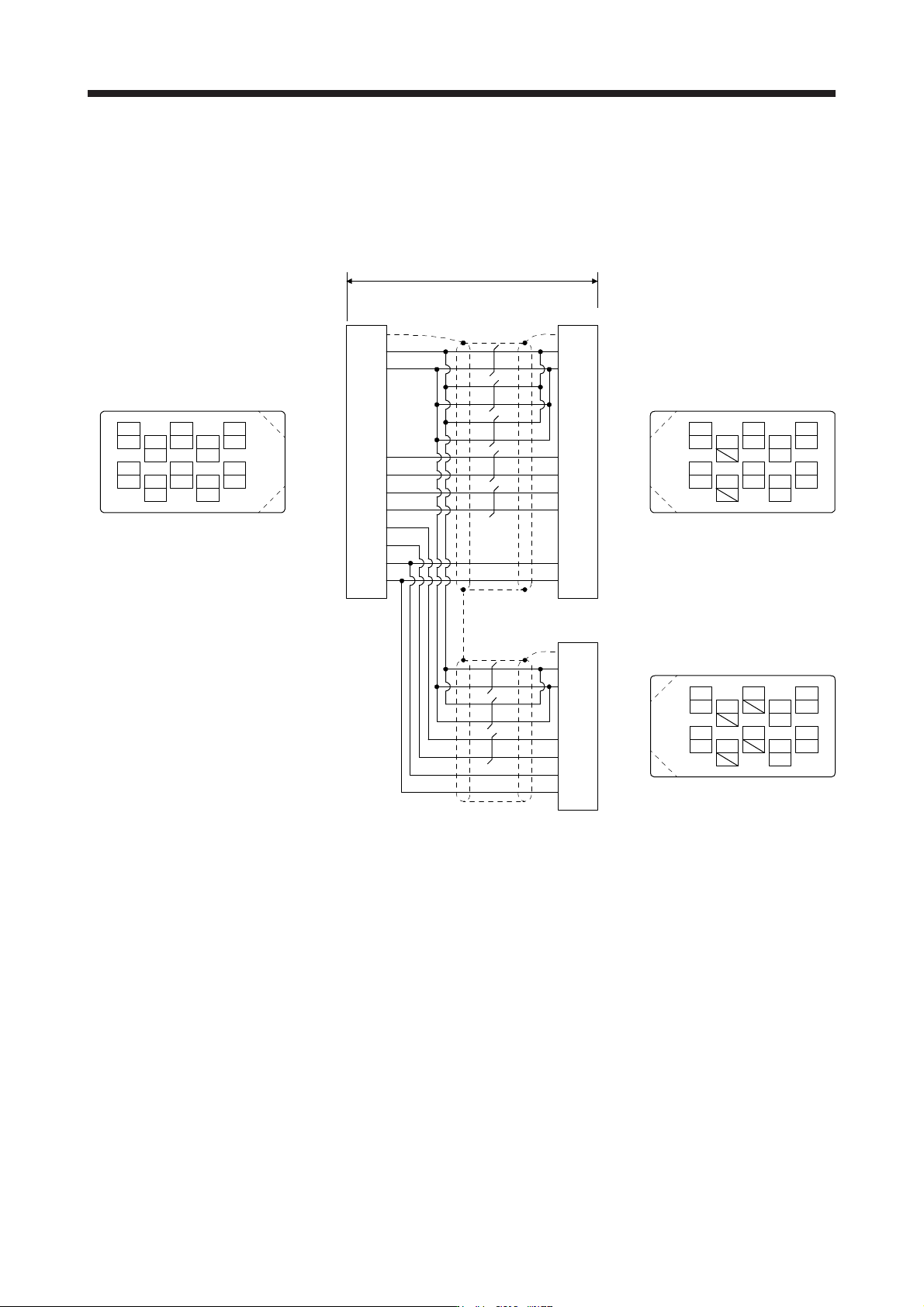
16.2.4 MR-J4FCCBL03M branch cable
Use MR-J4FCCBL03M branch cable to connect the rotary encoder and the load-side encoder to CN2
connector.
When fabricating the branch cable using MR-J3THMCN2 connector set, refer to "Linear Encoder Instruction
Manual".
LG
View seen from wiring side.
4
MRR
2
LG
8
6
1
P5
5
10
3
MR
7
9
THM2
THM1
MXR
SEL
THM2
THM1
SEL
MX
BAT
SD
3
4
1
CN2 MOTOR
Plate
(Note 1) (Note 2)
0.3 m
MR
P5
MRR
SD
MR
P5
MRR
3
4
1
Plate
View seen from wiring side.
4
MRR
2
8
6
1
P5
5
10
3
MR
7
9
View seen from wiring side.
4
2
8
6
15
10
37
9
BAT
2
THM2 6
7
MX
LG LG2
MXR 8
BAT
SEL
9
10
5THM1 5 THM1
6 THM2
9 BAT
10 SEL
SCALE
(Note 2)
P5
SD
SEL
LG
1
2
10
Plate
4 MXR
BAT9
3MX
BAT
SEL
LG
P5
MXR
MX
Note 1. Receptacle: 36210-0100PL, shell kit: 36310-3200-008
(
3M
)
2. Plu
g
: 36110-3000FD, shell kit: 36310-F200-008
(
3M
)
16. FULLY CLOSED LOOP SYSTEM
16 - 10
16.3 Operation and functions
16.3.1 Startup
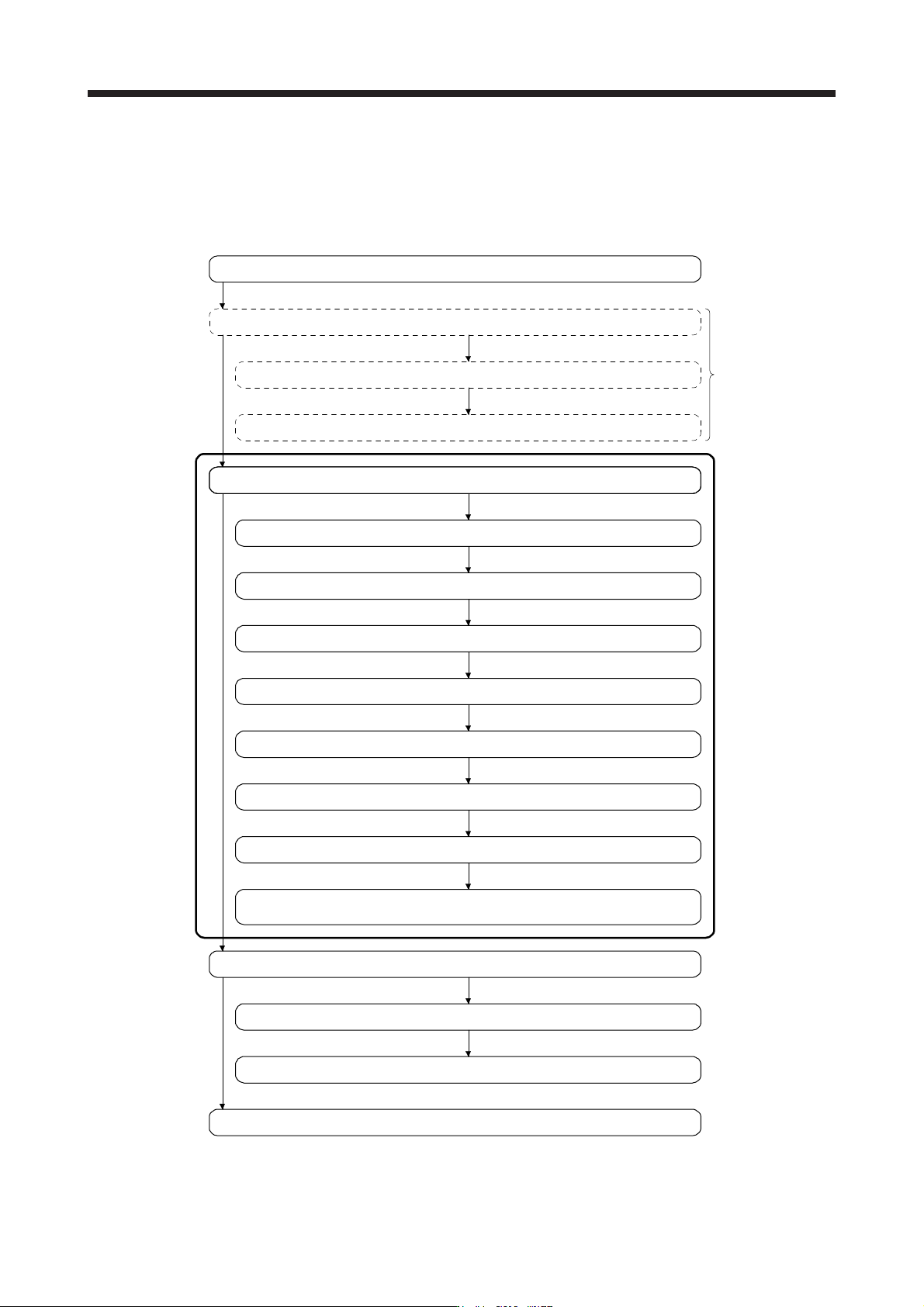
(1) Startup procedure
Start up the fully closed loop system in the following procedure.
Positioning operation check using the controller (Refer to section 16.3.3.)
Positioning operation check using MR Configurator2
Gain adjustment
Completion of installation and wiring
Positioning operation check using MR Configurator2
Adjustment and operation check in semi closed loop system
Gain adjustment
Adjustment and operation check in fully closed loop system
Selection of fully closed loop system (Refer to (2) in this section.)
Selection of load-side encoder communication system (Refer to (3) in this section.)
Adjustment of dual feedback switching filter.
(for dual feedback control) (Refer to (5) in this section.)
Setting of load-side encoder polarity (Refer to (4) in this section.)
Home position return operation (Refer to section 16.3.2.)
Positioning operation
Completion of fully closed loop system startup
Check that the servo
equipment is normal.
Do as necessary.
Setting of load-side encoder electronic gear (Refer to (5) in this section.)
Confirmation of load-side encoder position data (Refer to (6) in this section.)
16. FULLY CLOSED LOOP SYSTEM
16 - 11
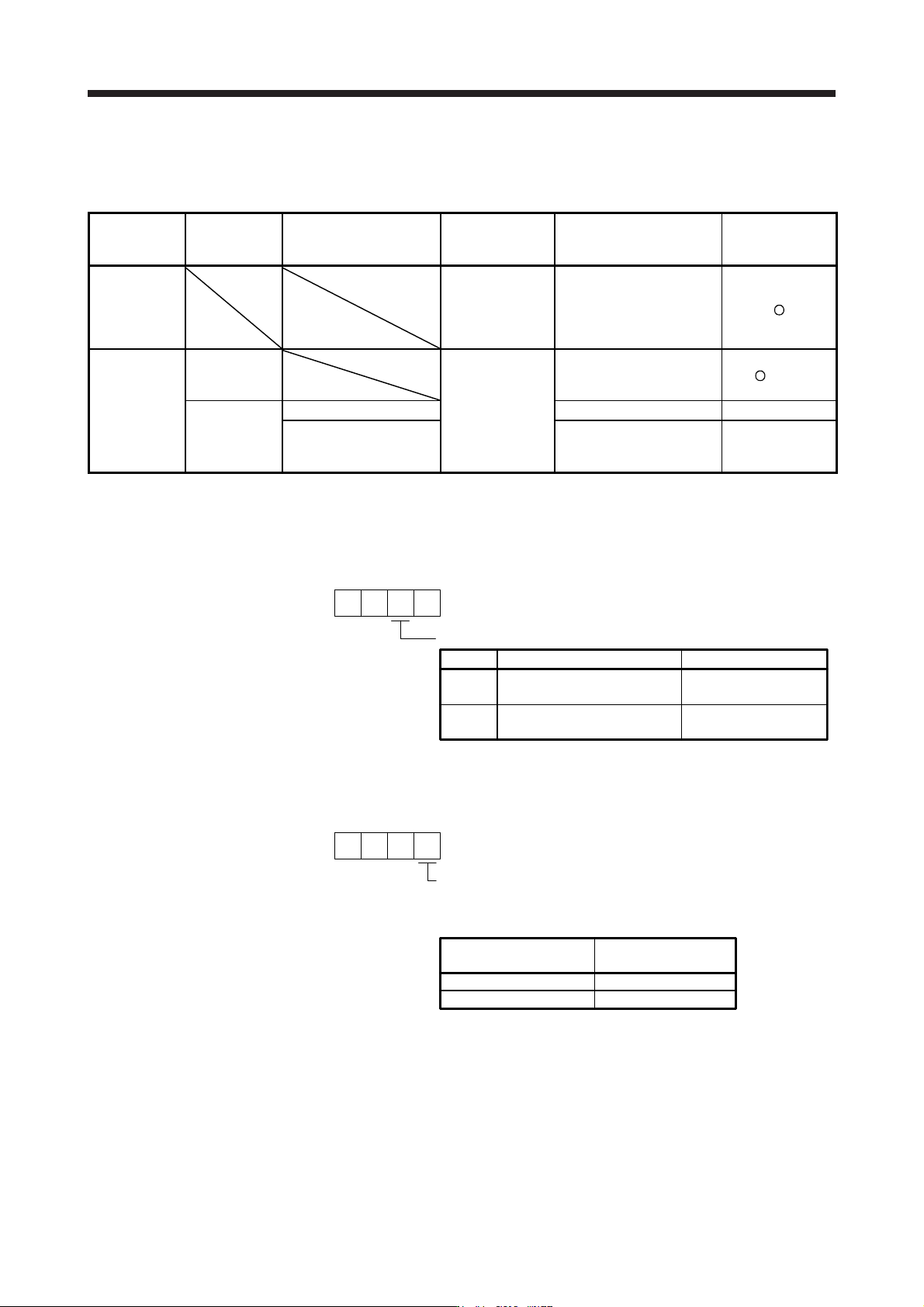
(2) Selection of fully closed loop system
By setting [Pr. PA01], [Pr. PE01] and the control command of controller, the control method can be
selected as shown in the following table.
[Pr. PA01] [Pr. PE01]
Semi closed loop control/
fully closed loop control
switching signal
Command unit Control System
Absolute position
detection
system
"_ _ 0 _"
Semi closed
loop system
(standard
control mode)
Servo motor
encoder unit
Semi closed loop control
"_ _ 1 _ "
Fully closed
loop system
(fully closed
loop control
mode)
"_ _ _ 0"
Load-side encoder
unit
Dual feedback
control (fully closed loop
control)
(Note)
"_ _ _ 1" Off
Semi closed loop control
×
On
Dual feedback
control (fully closed loop
control)
×
Note.
A
pplicable when the load-side encoder is set as the absolute position encoder.
(a) Operation mode selection
Select a operation mode.
Operation mode selection
[Pr. PA01]
10 0
Semi closed loop system
(Standard control mode)
Fully closed loop system
(Fully closed loop control mode)
Load-side encoder
resolution unit
Set value
0
1
Operation mode
Servo motor-side
resolution unit
Control unit
(b) Semi closed loop control/fully closed loop control selection
Select the semi closed loop control/fully closed loop control.
Fully closed loop control selection
0: Always enabled
1: Switching using the control command of controller
(switching between semi closed/fully closed)
00
Selection using the control
command of controller
OFF
ON
Semi closed loop control
Fully closed loop control
Control method
When the operation mode selection in [Pr. PA01] is set to "_ _ 1 _"
(fully closed loop system), this setting is enabled.
0
[Pr. PE01]