sh030106u.pdf - 第540页
16. FULLY CLOSE D L OOP SYS TEM 16 - 15 (6) Confirmat ion of load-s ide e ncoder p osition data Check the load-s ide enco der mou nting and para meter s ettings for any prob lems. POINT Depending on the c heck it ems, MR…
16. FULLY CLOSED LOOP SYSTEM
16 - 14
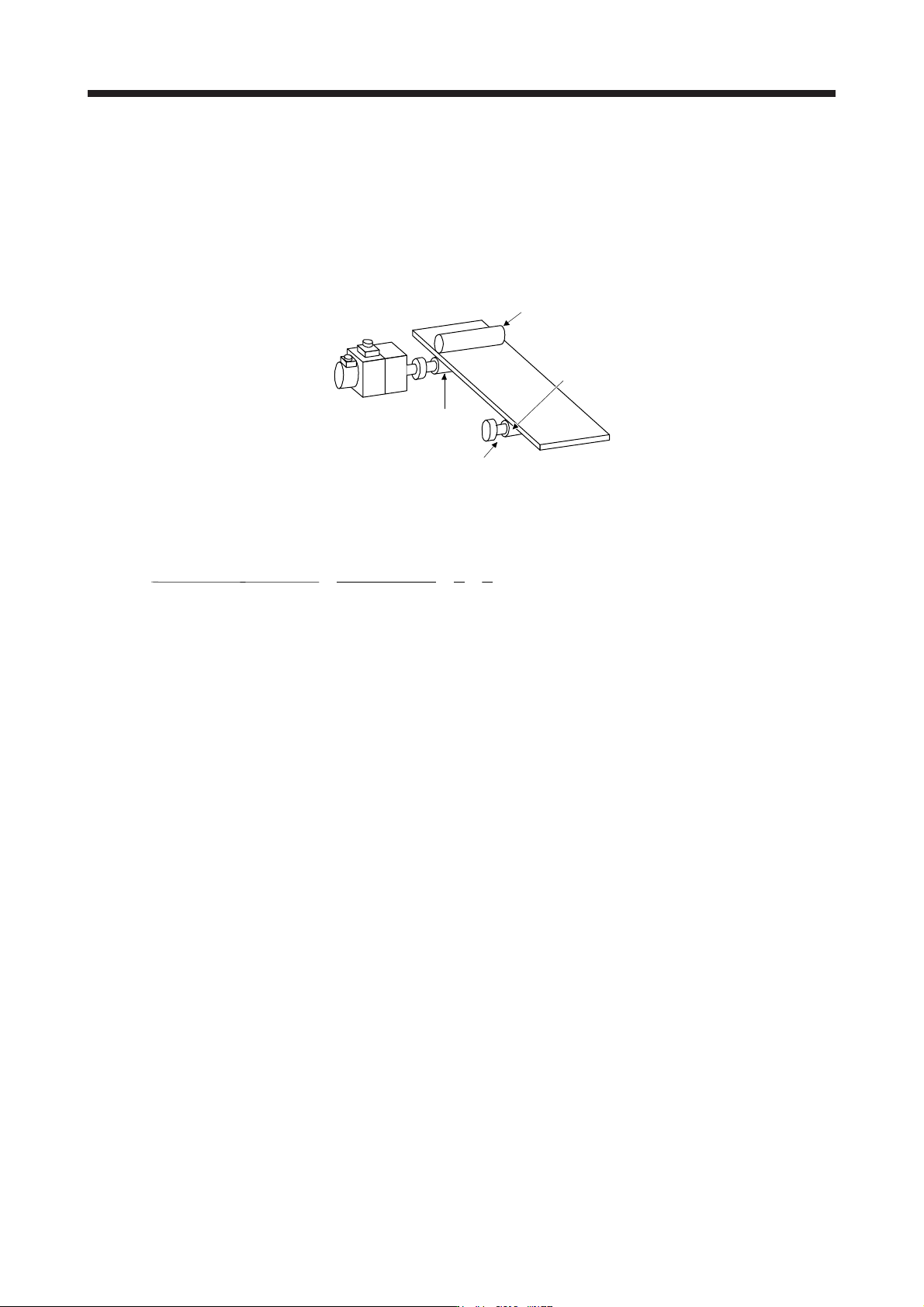
(b) Setting example when using the rotary encoder for the load-side encoder of roll feeder
Conditions
Servo motor resolution: 4194304 pulses/rev
Pulley diameter on the servo motor side: 30 mm
Pulley diameter on the rotary encoder side: 20 mm
Rotary encoder resolution: 4194304 pulse/rev
Servo motor
Rotary encoder
(HG-KR or HG-MR servo motor)
4194304 pulses/rev
Drive part
Pulley diameter
d1 = 30 mm
Pulley diameter
d2 = 20 mm
When the pulley diameters or reduction ratios differ, consider that in calculation.
=
[Pr. PE04] × [Pr. PE34]
[Pr. PE05] × [Pr. PE35]
4194304 × 20
1
1
4194304 × 30
=×
3
2
16. FULLY CLOSED LOOP SYSTEM
16 - 15
(6) Confirmation of load-side encoder position data
Check the load-side encoder mounting and parameter settings for any problems.
POINT
Depending on the check items, MR Configurator2 may be used.
Refer to section 16.3.9 for the data displayed on the MR Configurator2.
When checking the following items, the fully closed loop control mode must be set. For the setting of
control mode, refer to (2) in this section.
No. Check item Confirmation method and description
1
Read of load-side encoder position
data
With the load-side encoder in a normal state (mounting, connection, etc.), the load-side
cumulative feedback pulses value is counted normally when the load-side encoder is
moved.
1. An alarm occurred.
2. The installation of the load-side encoder was not correct.
3. The encoder cable was not wired correctly.
2
Read of load-side encoder home
position (reference mark, Z-phase)
With the home position (reference mark, or Z-phase) of the load-side encoder in a normal
condition (mounting, connection, etc.), the value of load-side encoder information 1 is
cleared to 0 when the home position (reference mark, or Z-phase) is passed through by
moving the load-side encoder.
1. The installation of the load-side encoder was not correct.
2. The encoder cable was not wired correctly.
3
Confirmation of load-side encoder
feedback direction
(Setting of load-side encoder
polarity)
Confirm that the directions of the cumulative feedback pulses of servo motor encoder (after
gear) and the load-side cumulative feedback pulses are matched by moving the device
(load-side encoder) manually in the servo-off status. If mismatched, reverse the polarity.
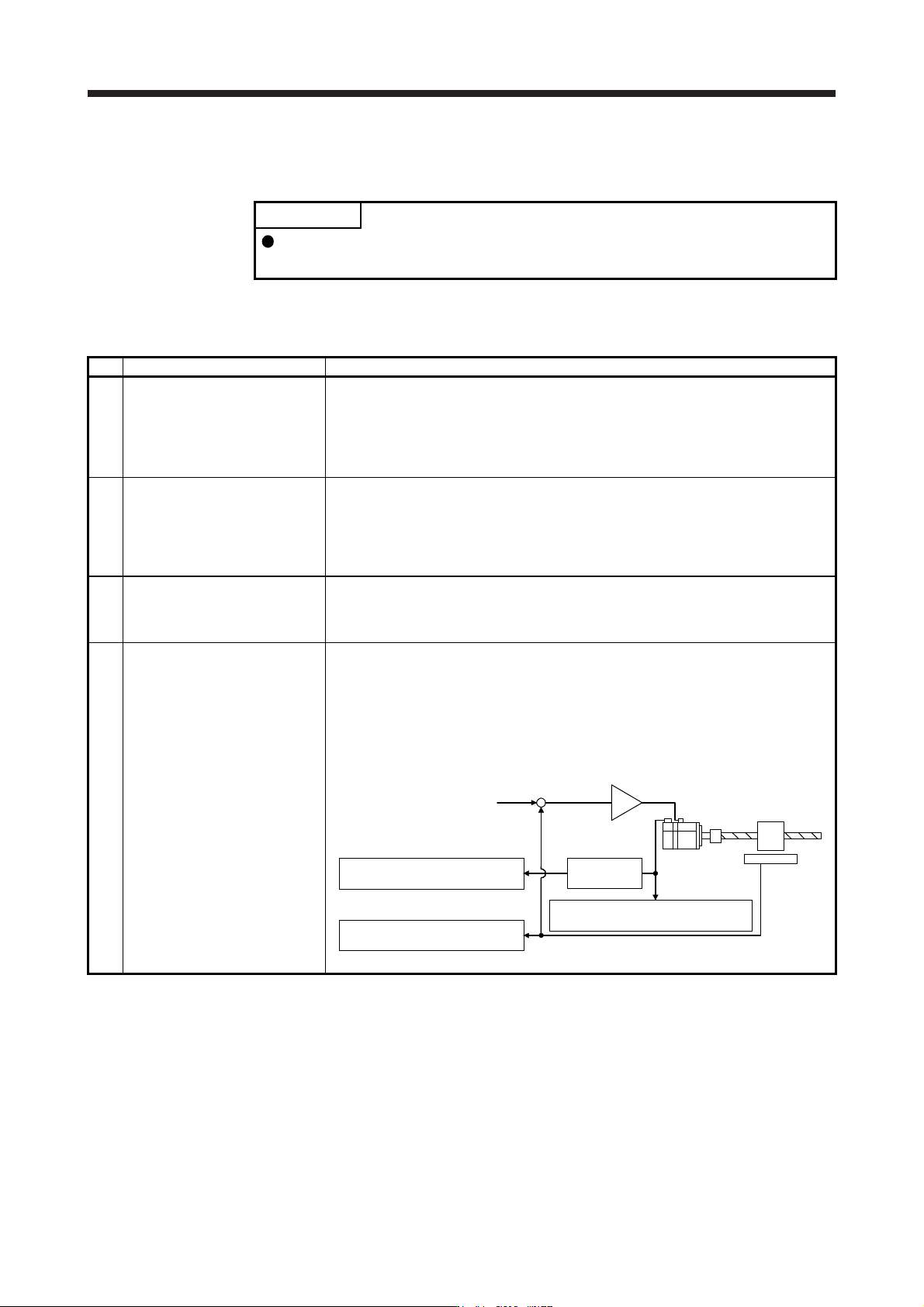
4
Setting of load-side encoder
electronic gear
When the servo motor and load-side encoder operate synchronously, the servo motor-side
cumulative feedback pulses (after gear) and load-side cumulative feedback pulses are
matched and increased.
If mismatched, review the setting of fully closed loop control feedback electronic gear ([Pr.
PE04], [Pr. PE05], [Pr. PE34], and [Pr. PE35]) with the following method.
1) Check the servo motor-side cumulative feedback pulses (before gear).
2) Check the load-side cumulative feedback pulses.
3) Check that the ratio of above 1) and 2) has been that of the feedback electronic gear.
Servo motor
Linear
encoder
+
-
Servo motor-side cumulative
feedback pulses (after gear)
3) Electronic
gear
2) Load-side cumulative
feedback pulses
Command
1) Servo motor-side cumulative
feedback pulses (before gear)
16. FULLY CLOSED LOOP SYSTEM
16 - 16
(7) Setting of fully closed loop dual feedback filter
With the initial value (setting = 10) set in [Pr. PE08 Fully closed loop dual feedback filter the dual
feedback filter], make gain adjustment by auto tuning, etc. as in semi closed loop control. While
observing the servo operation waveform with the graph function, etc. of MR Configurator2, adjust the
dual feedback filter.
The dual feedback filter operates as described below depending on the setting.
[Pr. PE08] setting Control mode Vibration Settling time
0 Semi closed loop
1
to
4499
Dual feedback
Not frequently occurs
to
Frequently occurs
Long time
to
Short time
4500 Fully closed loop
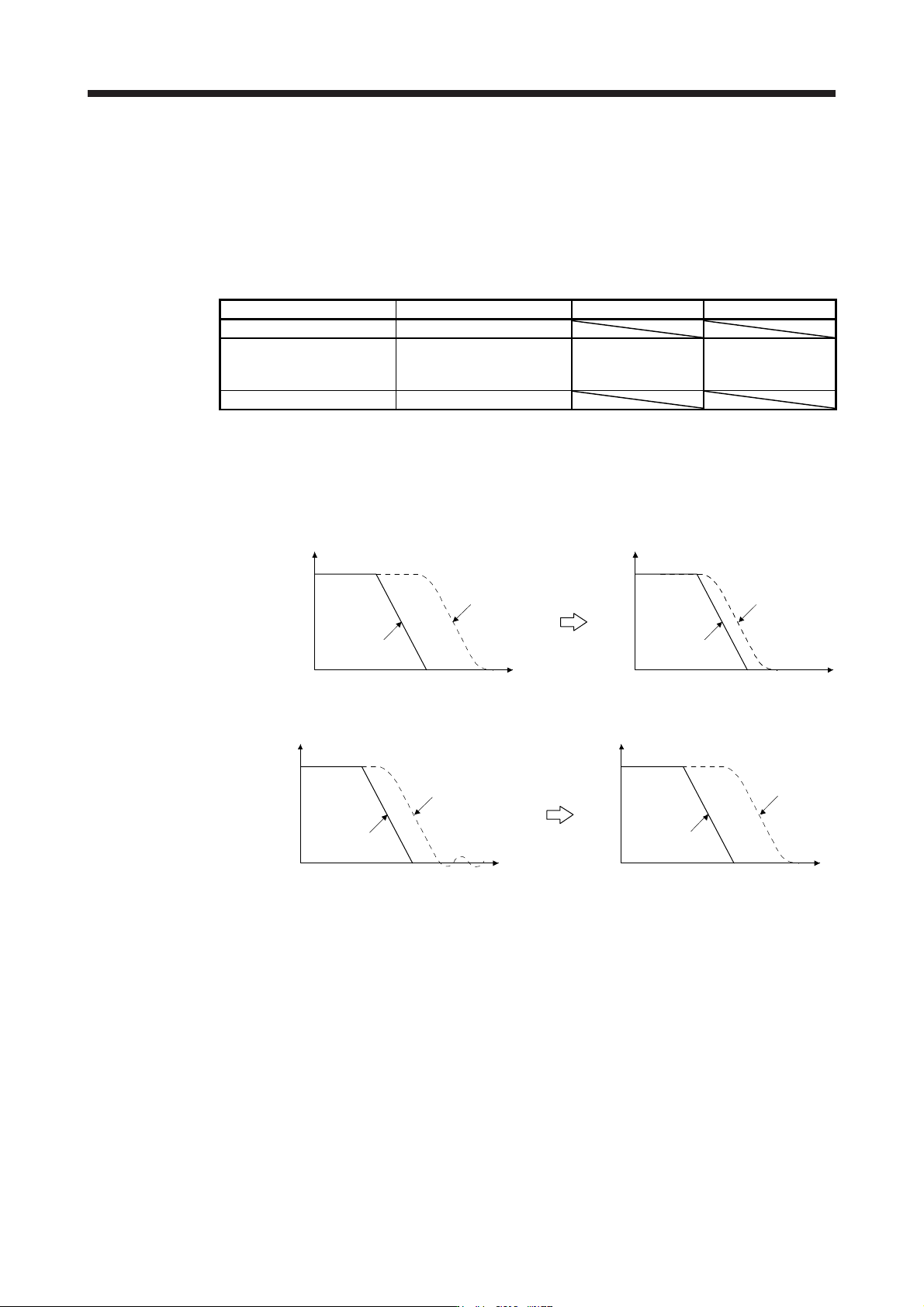
Increasing the dual feedback filter setting shortens the settling time, but increases servo motor vibration
since the motor is more likely to be influenced by the load-side encoder vibration. The maximum setting
of the dual feedback filter should be less than half of the PG2 setting.
Reduction of settling time: Increase the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
TimeTime
Suppression of vibration: Decrease the dual feedback filter setting.
Droop pulses
Command
Droop pulses
Command
TimeTime