sh030106u.pdf - 第220页
6. NORM AL GAIN ADJ USTMENT 6 - 19 6.3.2 Au to tuning mode b asis The block diagram of real- time a uto tun ing is s hown be low. Loop gain PG1, PG2 , VG2, VIC Current control Load to motor inertia ratio estimation secti…
6. NORMAL GAIN ADJUSTMENT
6 - 18
6.3 Auto tuning
6.3.1 Auto tuning mode
The servo amplifier has a real-time auto tuning function which estimates the machine characteristic (load to
motor inertia ratio) in real time and automatically sets the optimum gains according to that value. This
function permits ease of gain adjustment of the servo amplifier.
(1) Auto tuning mode 1
The servo amplifier is factory-set to the auto tuning mode 1.
In this mode, the load to motor inertia ratio of a machine is always estimated to set the optimum gains
automatically.
The following parameters are automatically adjusted in the auto tuning mode 1.
Parameter Symbol Name
PB06 GD2 Load to motor inertia ratio/load to motor mass ratio
PB07 PG1 Model loop gain
PB08 PG2 Position loop gain
PB09 VG2 Speed loop gain
PB10 VIC Speed integral compensation
POINT
The auto tuning mode 1 may not be performed properly if all of the following
conditions are not satisfied.
The acceleration/deceleration time constant to reach 2000 r/min (mm/s) is 5 s
or less.
Speed is 150 r/min (mm/s) or higher.
The load to servo motor (mass of linear servo motor's primary side or direct
drive motor) inertia ratio is 100 times or less.
The acceleration/deceleration torque is 10% or more of the rated torque.
Under operating conditions which will impose sudden disturbance torque during
acceleration/deceleration or on a machine which is extremely loose, auto tuning
may not function properly, either. In such cases, use the auto tuning mode 2 or
manual mode to make gain adjustment.
(2) Auto tuning mode 2
Use the auto tuning mode 2 when proper gain adjustment cannot be made by auto tuning mode 1. Since
the load to motor inertia ratio is not estimated in this mode, set the value of a correct load to motor inertia
ratio in [Pr. PB06].
The following parameters are automatically adjusted in the auto tuning mode 2.
Parameter Symbol Name
PB07 PG1 Model loop gain
PB08 PG2 Position loop gain
PB09 VG2 Speed loop gain
PB10 VIC Speed integral compensation
6. NORMAL GAIN ADJUSTMENT
6 - 19
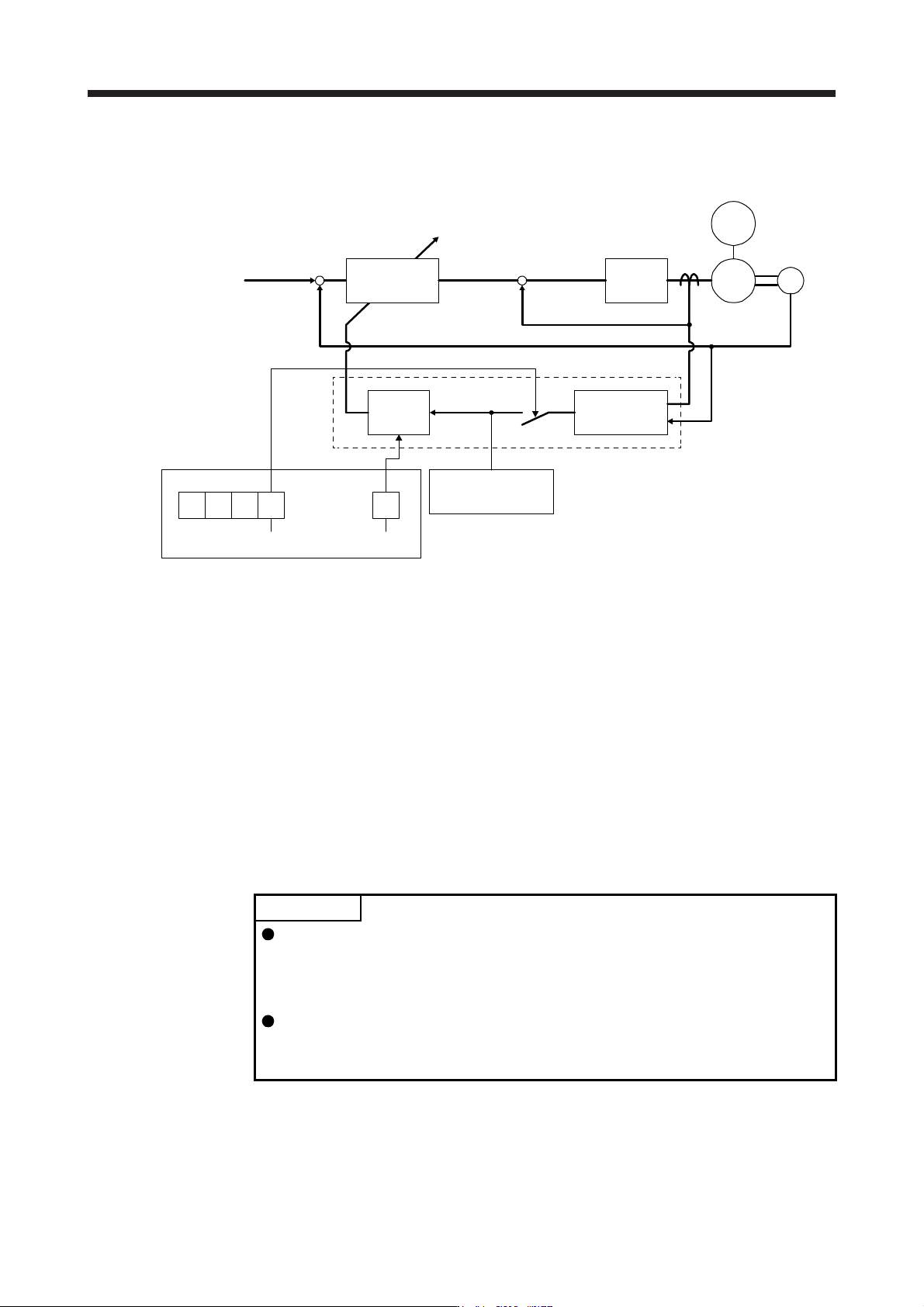
6.3.2 Auto tuning mode basis
The block diagram of real-time auto tuning is shown below.
Loop gain
PG1, PG2,
VG2, VIC
Current
control
Load to motor
inertia ratio
estimation section
Gain table
[Pr. PB06 Load to
motor inertia ratio/
load to motor mass ratio]
Response
level setting
Gain adjustment mode selection
[Pr. PA08]
+
-
+
-
Real-time
auto tuning section
Set 0 or 1 to turn on.
Switch
Current feedback
Position/speed
feedback
Speed feedback
Load moment
of inertia
Encoder
Command
Automatic setting
[Pr. PA09]
M
Servo motor
000
When a servo motor is accelerated/decelerated, the load to motor inertia ratio estimation section always
estimates the load to motor inertia ratio from the current and speed of the servo motor. The results of
estimation are written to [Pr. PB06 Load to motor inertia ratio/load to motor mass ratio]. These results can be
confirmed on the status display screen of the MR Configurator2.
If you have already known the value of the load to motor inertia ratio or failed to estimate, set "Gain
adjustment mode selection" to "Auto tuning mode 2 (_ _ _ 2)" in [Pr. PA08] to stop the estimation (turning off
the switch in above diagram), and set the load to motor inertia ratio or load to motor mass ratio ([Pr. PB06])
manually.
From the preset load to motor inertia ratio ([Pr. PB06]) value and response ([Pr. PA09]), the optimum loop
gains are automatically set on the basis of the internal gain table.
The auto tuning results are saved in the EEP-ROM of the servo amplifier every 60 minutes since power-on.
At power-on, auto tuning is performed with the value of each loop gain saved in the EEP-ROM being used as
an initial value.
POINT
If sudden disturbance torque is imposed during operation, the load to motor
inertia ratio may be misestimated temporarily. In such a case, set "Gain
adjustment mode selection" to "Auto tuning mode 2 (_ _ _ 2)" in [Pr. PA08] and
then set the correct load to motor inertia ratio in [Pr. PB06].
When any of the auto tuning mode 1 and auto tuning mode settings is changed
to the manual mode 2 setting, the current loop gains and load to motor inertia
ratio estimation value are saved in the EEP-ROM.
6. NORMAL GAIN ADJUSTMENT
6 - 20
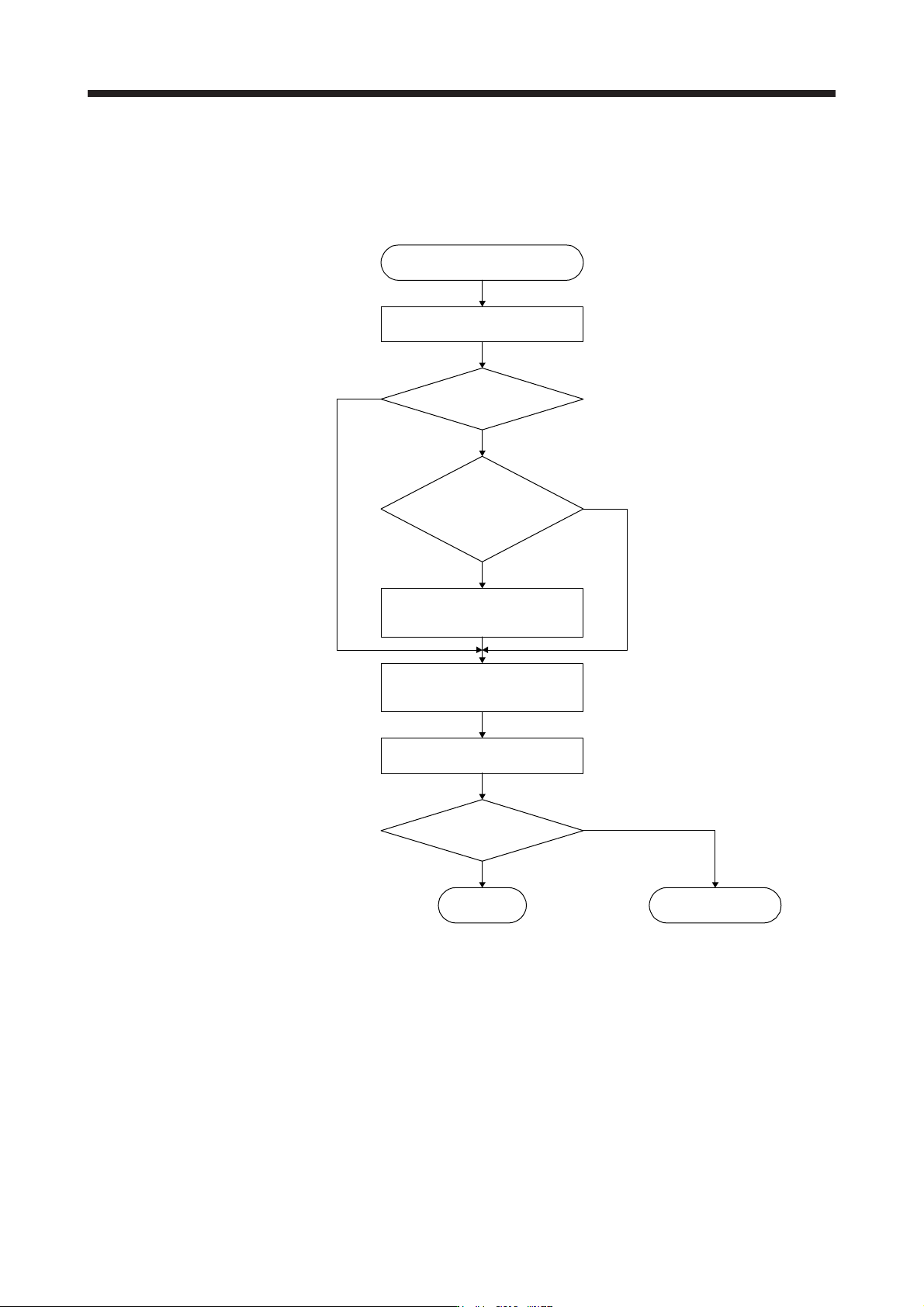
6.3.3 Adjustment procedure by auto tuning
Since auto tuning is enabled before shipment from the factory, simply running the servo motor automatically
sets the optimum gains that match the machine. Merely changing the response level setting value as
required completes the adjustment. The adjustment procedure is as follows.
Auto tuning adjustment
Acceleration/deceleration repeated
Auto tuning conditions
are not satisfied? (Estimation of
load to motor inertia ratio is
difficult.)
Load to motor inertia ratio
estimation value stable?
Set [Pr. PA08] to "_ _ _ 2" and set
[Pr. PB06 Load to motor inertia
ratio/load to motor mass ratio] manually.
Adjust response level setting so
that desired response is achieved
on vibration-free level.
To 2 gain adjustment
mode 2
Requested performance
satisfied?
End
Yes
No
Yes
No
No
Yes
Acceleration/deceleration repeated