sh030106u.pdf - 第550页
16. FULLY CLOSE D L OOP SYS TEM 16 - 25 16.3.9 Abou t MR Con figur ator2 Using MR Co nfigurator2 c an conf irm if th e parameter s etting is norm al or if t he ser vo motor and the load-s ide encoder operate pr operly . …
16. FULLY CLOSED LOOP SYSTEM
16 - 24
16.3.8 Absolute position detection system under fully closed loop system
An absolute type linear encoder is necessary to configure an absolute position detection system under fully
closed loop control using a linear encoder. In this case, the encoder battery need not be installed to the
servo amplifier. When an rotary encoder is used, an absolute position detection system can be configured by
installing the encoder battery to the servo amplifier. In this case, the battery life will be shorter because the
power consumption is increased as the power is supplied to the two encoders of motor side and load side.
If using an absolute position detection system with a linear encoder, enable the system with [Pr. PA03
Absolute position detection system], and use this servo with the following restrictions.
(1) Using conditions
(a) Use an absolute type linear encoder with the load-side encoder.
(b) Set [Pr. PA01] to "_ _ 1 _", and [Pr. PE01] to "_ _ _ 0".
(2) Absolute position detection range using encoder
Encoder type Absolute position detection enabled range
Linear encoder
(Serial Interface)
Movable distance range of linear encoder (within 32-bit absolute position data)
(3) Alarm detection
The absolute position-related alarm ([AL. 25]) and warnings (AL. 92] and [AL. 9F]) are not detected.
16. FULLY CLOSED LOOP SYSTEM
16 - 25
16.3.9 About MR Configurator2
Using MR Configurator2 can confirm if the parameter setting is normal or if the servo motor and the load-side
encoder operate properly.
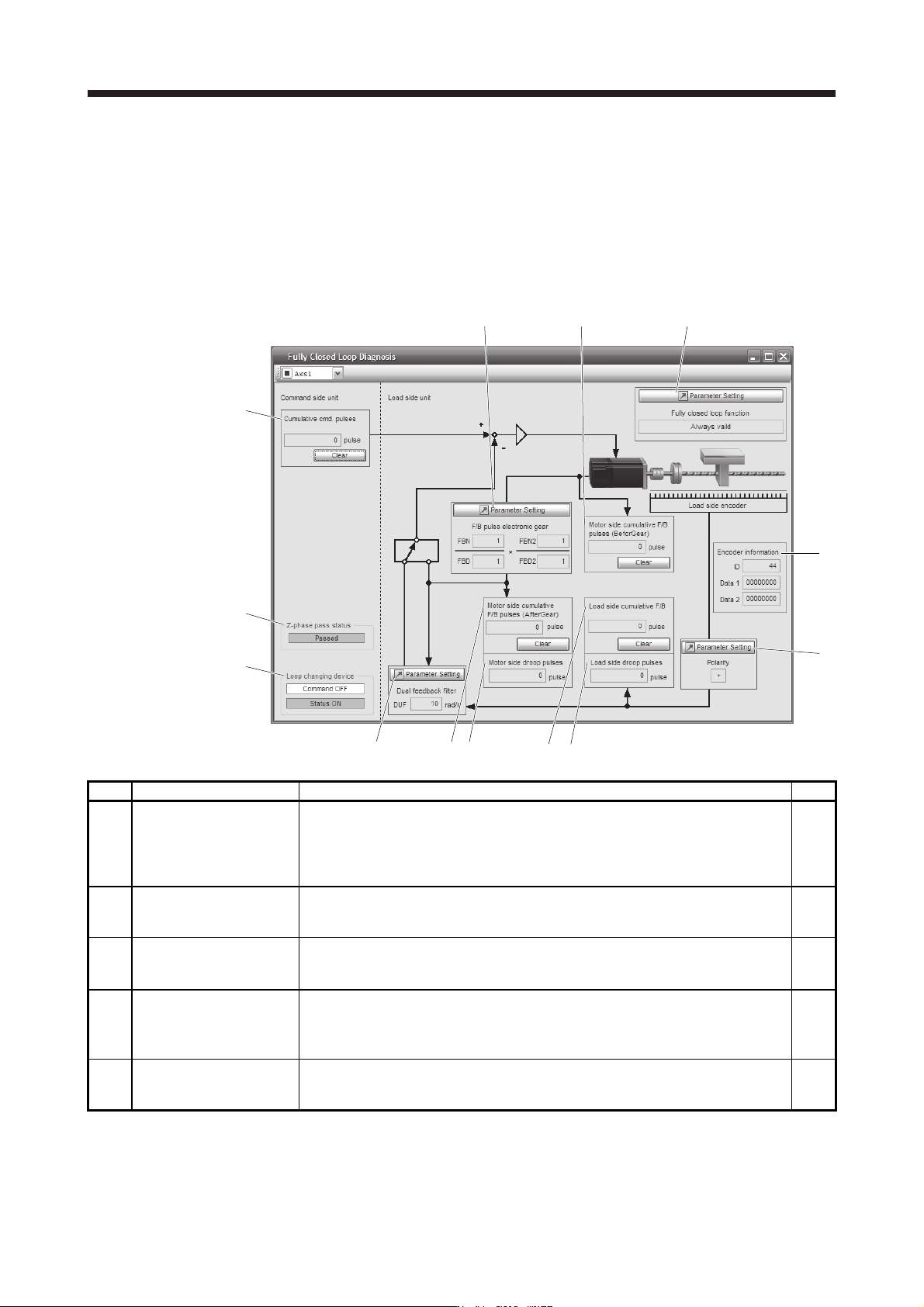
This section explains the fully closed diagnosis screen.
Click "Monitor start" to constantly read the monitor display items from the servo amplifier.
Then, click "Monitor stop" to stop reading. Click "Parameter read" to read the parameter items from the servo
amplifier, and then click "Parameter write" to write them.
f)
a)
c)
k)
b)
i)
h)
g)
d) e)
j)
m)
l)
Symbol Name Explanation Unit
a)
Motor side cumu. feedback
pulses (after gear)
Feedback pulses from the servo motor encoder are counted and displayed. (load-side
encoder unit)
When the set value exceeds 999999999, it starts with 0.
Click "Clear" to reset the value to 0.
The "-" symbol is indicated for reverse.
pulse
b) Motor side droop pulses
Droop pulses of the deviation counter between a servo motor-side position and a
command are displayed.
The "-" symbol is indicated for reverse.
pulse
c) Cumu. Com. pulses Position command input pulses are counted and displayed.
Click "Clear" to reset the value to 0.
The "-" symbol is indicated for reverse command.
pulse
d)
Load side cumu. feedback
pulses
Feedback pulses from the load-side encoder are counted and displayed.
When the set value exceeds 999999999, it starts with 0.
Click "Clear" to reset the value to 0.
The "-" symbol is indicated for reverse.
pulse
e) Load side droop pulses
Droop pulses of the deviation counter between a load-side position and a command are
displayed.
The "-" symbol is indicated for reverse.
pulse
16. FULLY CLOSED LOOP SYSTEM
16 - 26
Symbol Name Explanation Unit
f)
Motor side cumu. feedback
pulses (before gear)
Feedback pulses from the servo motor encoder are counted and displayed. (Servo
motor encoder unit)
When the set value exceeds 999999999, it starts with 0.
Click "Clear" to reset the value to 0.
The "-" symbol is indicated for reverse.
pulse
g) Encoder information The load-side encoder information is displayed.
The display contents differ depending on the load-side encoder type.
ID: The ID No. of the load-side encoder is displayed.
Data 1: For the incremental type linear encoder, the counter from powering on is
displayed. For the absolute position type linear encoder, the absolute position
data is displayed.
Data 2: For the incremental type linear encoder, the distance (number of pulses) from
the reference mark (Z-phase) is displayed. For the absolute position type
linear encoder, "00000000" is displayed.
h) Polarity
For address increasing direction in the servo motor CCW, it is indicated as "+" and for
address decreasing direction in the servo motor CCW, as "-".
i) Z phase pass status
If the fully closed loop system is "Disabled", the Z-phase pass status of the servo motor
encoder is displayed. If the fully closed loop system is "Enabled" or "Semi closed loop
control/fully closed loop control switching", the Z-phase pass status of the load-side
encoder is displayed.
j)
Fully closed loop changing
device
Only if the fully closed loop system is "Semi closed loop control/fully closed loop control
switching", the device is displayed.
The state of the semi closed loop control/fully closed loop control switching signal and
the inside state during selection are displayed.
k)
Parameter (Feedback pulse
electronic gear)
The feedback pulse electronic gears ([Pr. PE04], [Pr. PE05], [Pr. PE34], and [Pr. PE35])
are displayed/set for servo motor encoder pulses in this parameter. (Refer to section
16.3.1 (5).)
l)
Parameter (Dual feedback
filter)
The band of [Pr. PE08 Fully closed loop dual feedback filter] is displayed/set in this
parameter.
m)
Parameter (fully closed loop
selection)
The parameter for the fully closed loop control is displayed or set.
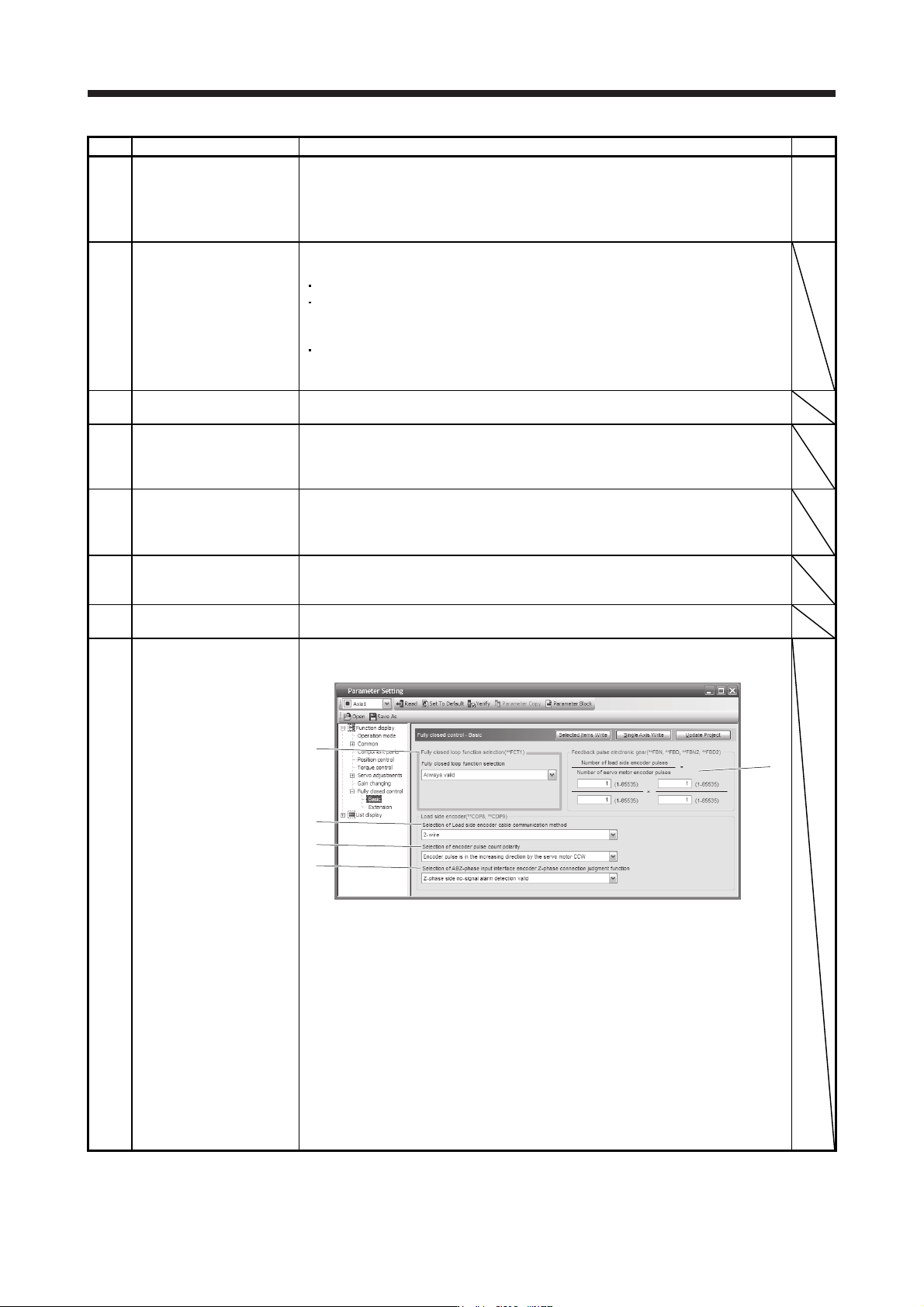
Click "Parameter setting" to display the "Fully closed loop control - Basic" window.
1)
2)
3)
4)
5)
1) Fully closed loop selection ([Pr. PE01])
"Always valid" or "Switching with the control command of controller" is selected here.
2) Feedback pulse electronic gear ([Pr. PE04], [Pr. PE05], [Pr. PE34], [Pr. PE35])
Setting of feedback pulse electronic gear
3) Load-side encoder cable communication method selection ([Pr. PC26])
4) Selection of encoder pulse count polarity ([Pr. PC27])
Polarity of the load-side encoder information is selected.
5) Selection of A/B/Z-phase input interface encoder Z-phase connection judgment
function ([Pr. PC27])
Select the non-signal detection status for the pulse train signal from the A/B/Z-phase
input interface encoder used as a linear encoder or load-side encoder.