sh030106u.pdf - 第478页
14. USIN G A LINEAR SER VO MOTOR 14 - 11 14.3.2 M agnetic p ole detec tion POINT Set [Pr. PE 47 Torque offset] to " 0 (initia l value)" bef ore exec uting th e magnetic pole detec tion. Before th e positi oning…
14. USING A LINEAR SERVO MOTOR
14 - 10
(b) Confirmation method
Confirm the positive direction of the linear servo motor and the increasing direction of the linear
encoder in the following procedure.
1) In servo-off status, move the linear servo motor in the positive direction manually.
2) Confirm the motor speed (in the positive and negative directions) at that time with MR
Configurator2.
3) When [Pr. PC27] is set to "_ _ _ 0" and the positive direction of the linear servo motor matches
with the increasing direction of the linear encoder, if the linear servo motor operates in the
positive direction, the motor speed will be a positive value. If the positive direction of the linear
servo motor does not match with the increasing direction of the linear encoder, the motor speed
will be a negative value. When [Pr. PC27] is set to "_ _ _ 1" and the positive direction of the linear
servo motor matches with the increasing direction of the linear encoder, if the linear servo motor
operates in the positive direction, the motor speed will be a negative value.
(4) Linear encoder resolution setting
POINT
To enable the parameter value, cycle the power after setting.
If an incorrect value is set for [Pr. PL02] or [Pr. PL03], the linear servo motor
may not operate properly, or [AL. 27] or [AL. 42] may occur at the positioning
operation or the magnetic pole detection.
Set the ratio of the electronic gear to the linear encoder resolution with [Pr. PL02 Linear encoder
resolution - Numerator] and [Pr. PL03 Linear encoder resolution - Denominator].
(a) Parameter setting
Set the values that apply to the following equation.
[Pr. PL02 Linear encoder resolution - Numerator]
[Pr. PL03 Linear encoder resolution - Denominator]
= Linear encoder resolution [µm]
(b) Parameter setting example
When the linear encoder resolution is 0.5 µm
[Pr. PL02]
[Pr. PL03]
= Linear encoder resolution = 0.5 µm =
2
1
The following shows the simplified chart for the setting values of [Pr. PL02] and [Pr. PL03].
Linear encoder resolution [µm]
0.01 0.02 0.05 0.1 0.2 0.5 1.0 2.0
Setting
value
[Pr. PL02] 1 1 1 1 1 1 1 2
[Pr. PL03] 100 50 20 10 5 2 1 1
14. USING A LINEAR SERVO MOTOR
14 - 11
14.3.2 Magnetic pole detection
POINT
Set [Pr. PE47 Torque offset] to "0 (initial value)" before executing the magnetic
pole detection.
Before the positioning operation of the linear servo motor, make sure to perform the magnetic pole detection.
When [Pr. PL01] is set to the initial value, perform the magnetic pole detection only at the first servo-on after
the power is turned on.
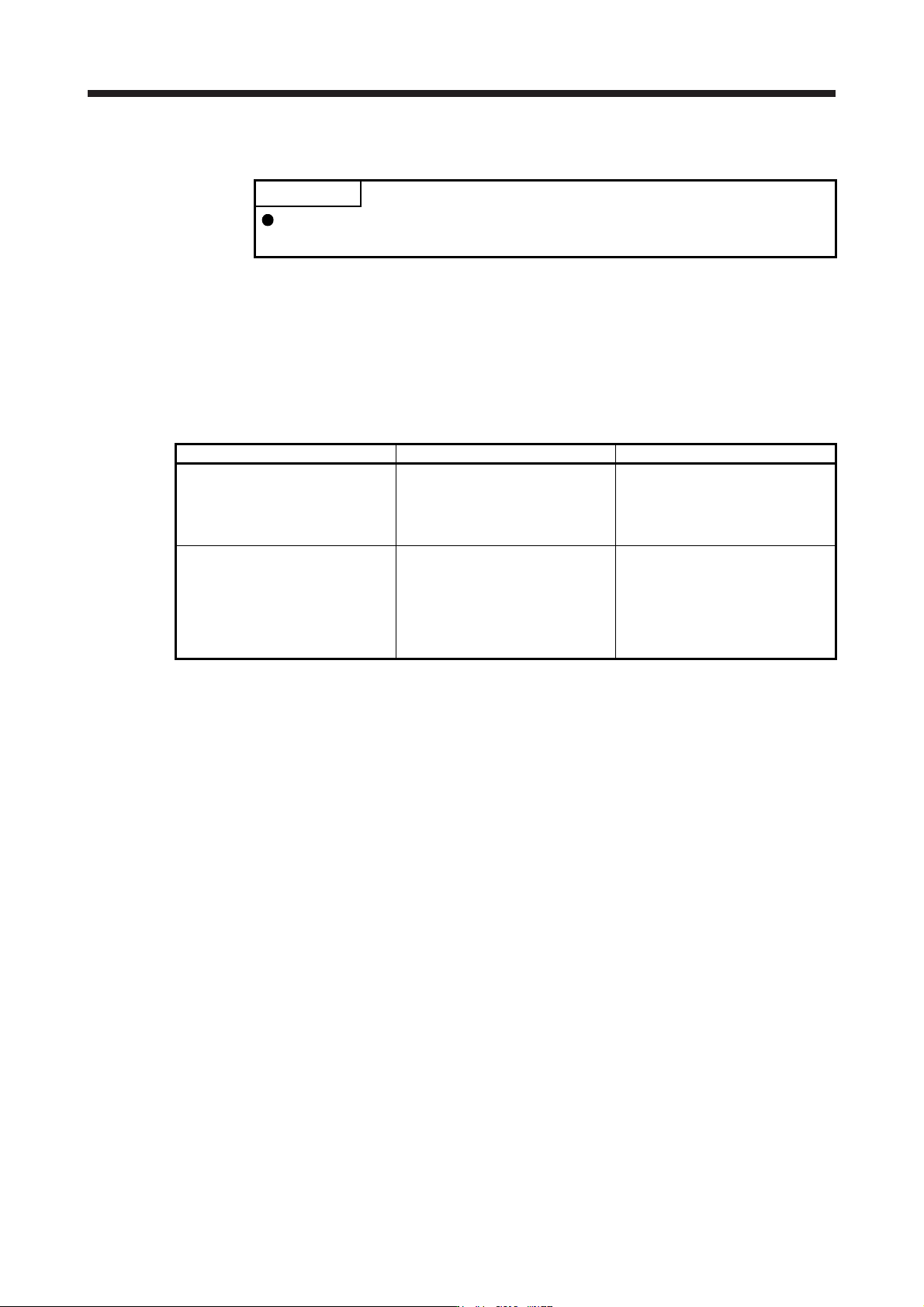
The magnetic pole detection includes the following two methods. Each method has advantages and
disadvantages. Select a magnetic pole detection method suitable for your usage.
The position detection method is selected in the initial setting.
Magnetic pole detection Advantage Disadvantage
Position detection method
1. The magnetic pole detection has a
high degree of accuracy.
2. The adjustment procedure at the
magnetic pole detection is simple.
1. The travel distance at the
magnetic pole detection is large.
2. For equipment with small friction,
the initial magnetic pole detection
error may occur.
Minute position detection method
1. The travel distance at the
magnetic pole detection is small.
2. Even for equipment with small
friction, the magnetic pole
detection is available.
1. The adjustment procedure at the
magnetic pole detection is
complex.
2. If a disturbance occurs during the
magnetic pole detection, [AL. 27
Initial magnetic pole detection
error] may occur.
14. USING A LINEAR SERVO MOTOR
14 - 12
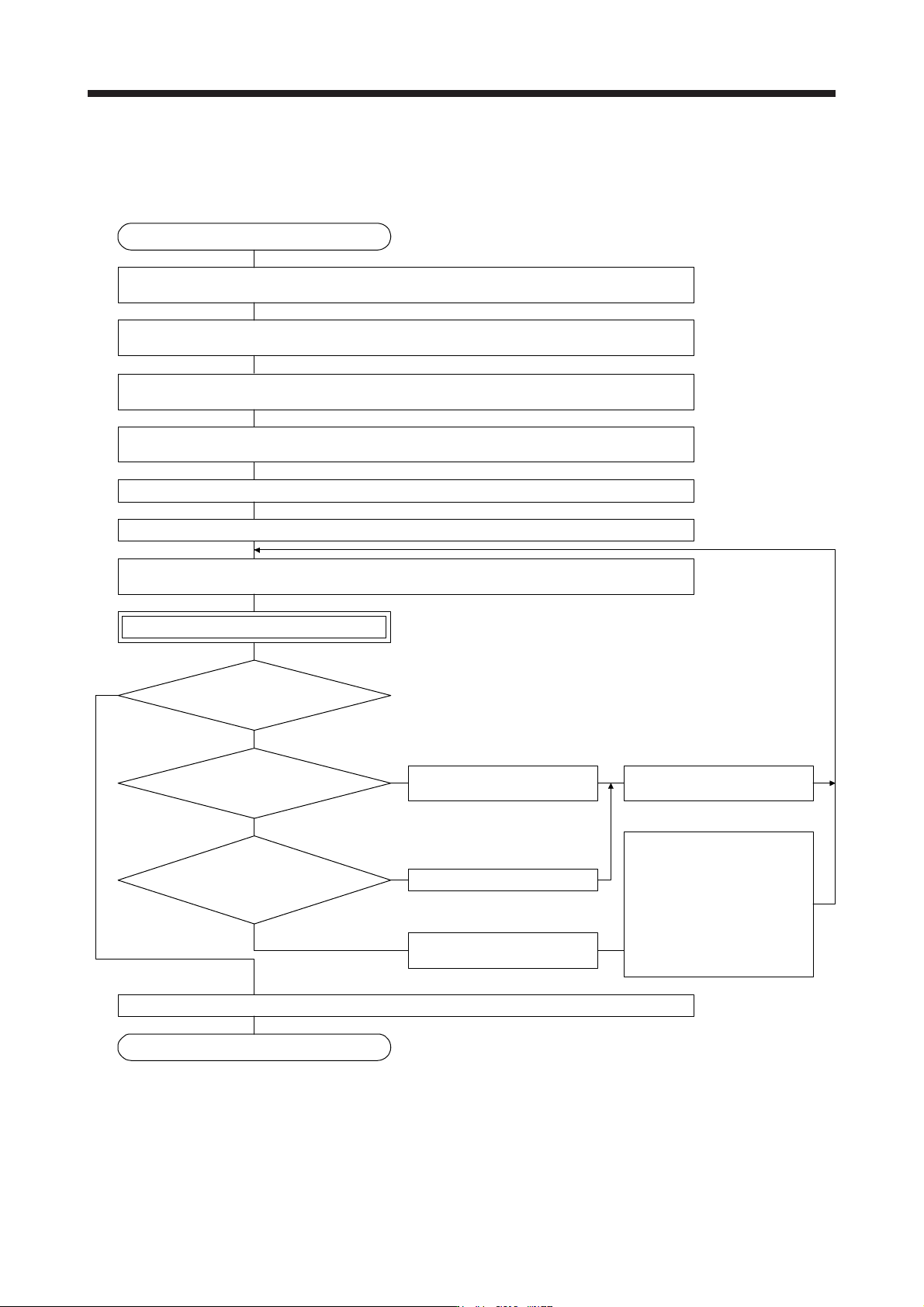
(1) Magnetic pole detection method by using MR Configurator2
The following shows the magnetic pole detection procedure by using MR Configurator2.
(a) Magnetic pole detection by the position detection method
Have [AL. 32 Overcurrent], [AL. 50
Overload 1], [AL. 51 Overload 2], and
[AL. E1 Overload warning 1]
occurred?
1) Check that FLS (Upper stroke limit), RLS (Lower stroke limit), and EM2 (Forced stop 2) are on, and
then cycle the servo amplifier power.
Turn "On (up)" the test operation select switch (SW2-1) of the servo amplifier, and then cycle the
power of the servo amplifier.
Set [Pr. PL08 Linear servo motor/DD motor function selection 3] to "_ _ _ 0" to set the magnetic
pole detection method to "Position detection method".
Cycle the servo amplifier power.
6) Set [Pr. PL09 Magnetic pole detection voltage level] to "10".
7) Execute "Positive direction travel" or "Negative direction travel" with "Positioning operation" in the
test operation mode on MR Configurator2. Set the travel distance to "0" at this time.
8)
Set [Pr. PL01] to "_ _ _ 0" to set "Magnetic pole detection disabled". (Note)
2)
3)
4)
5)
The magnetic pole detection is carried out.
Is [Pr. PL09] the final value?
Has [AL. 27 Initial magnetic pole
detection error] occurred?
Reset the alarm or cycle the
servo amplifier power.
Cycle the servo amplifier power.
Reset the alarm or cycle the
servo amplifier power.
Increase the value of [Pr. PL09]
by five.
Set an approximately 70% of the
value set for [Pr. PL09] as the
final setting value.
If [AL. 27 Initial magnetic pole
detection error] occurs with this
value, specify a value
intermediate between the value
set at [AL. E1 Overload warning
1] and the value set at [AL. 27
Initial magnetic pole detection
error] as the final setting value.
NO
YES
YES
NO
YES
NO
Magnetic pole detection
End
Set [Pr. PL01 Linear servo motor/DD motor function selection 1] to "_ _ _ 1" to enable "Magnetic
pole detection at first servo-on". (Note)
Note. For the incremental s
y
stem, the [Pr. PL01] settin
g
is not required.