sh030106u.pdf - 第616页
17. APPLICATIO N OF FUNCTIONS 17 - 65 (9) Lost motio n com pensa tion f unction POINT The lost mo tion c ompensat ion fu nction is ena bled o nly in t he po s ition co ntrol mode. The lost mo tion c ompensat ion fu nctio…
17. APPLICATION OF FUNCTIONS
17 - 64
(c) Calculation of tolerance against instantaneous power failure
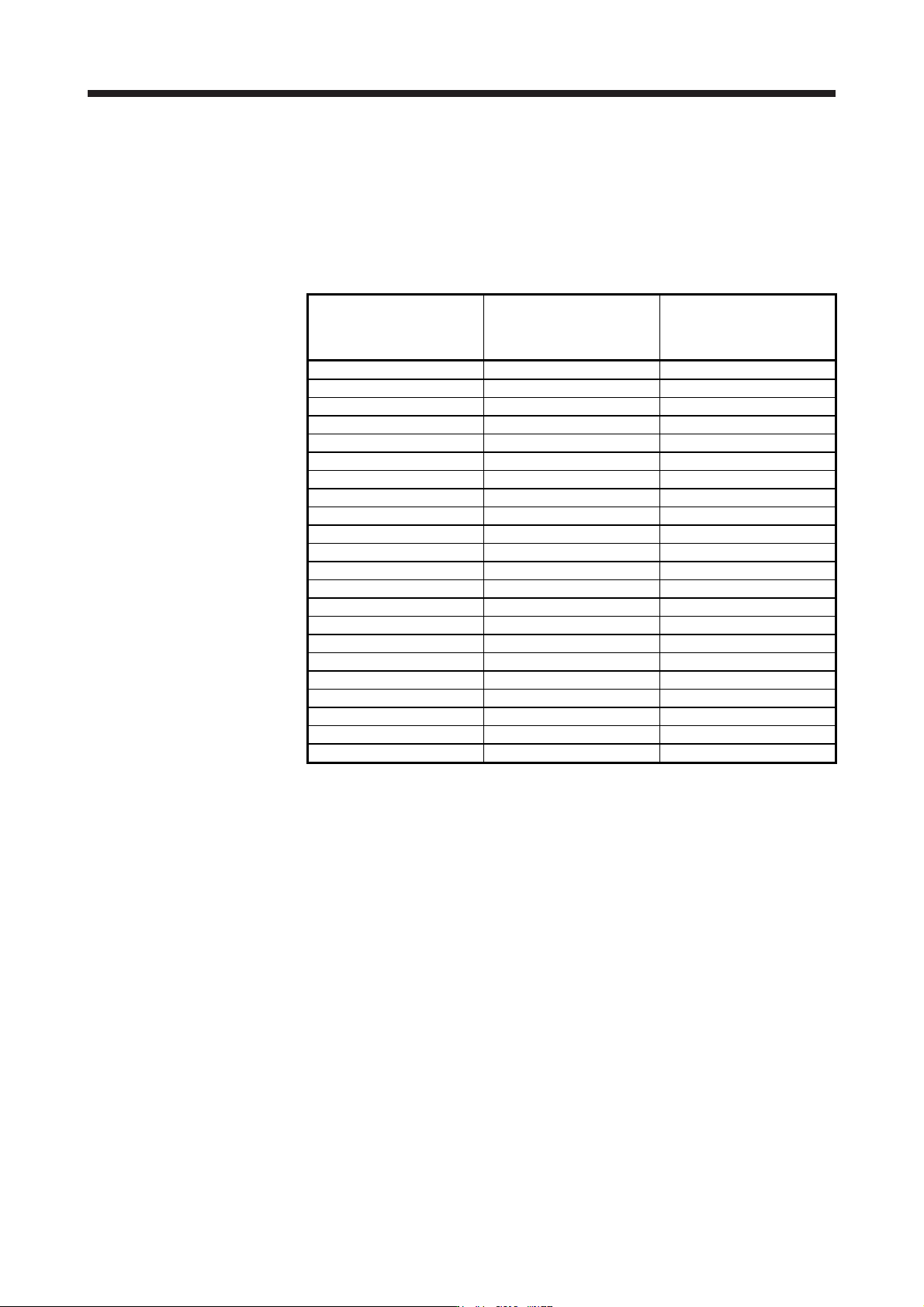
Table 17.10 shows tolerance against instantaneous power failure when instantaneous power failure
voltage is "rated voltage × 50%" and instantaneous power failure time is 200 ms.
Table 17.10 Tolerance against instantaneous power failure
(instantaneous power failure voltage = rated voltage × 50%,
instantaneous power failure time = 200 ms)
Servo amplifier
Instantaneous maximum
output [W]
Tolerance against
instantaneous
power failure [W]
(voltage drop between lines)
MR-J4-10B(-RJ) 350 250
MR-J4-20B(-RJ) 700 420
MR-J4-40B(-RJ) 1400 630
MR-J4-60B(-RJ) 2100 410
MR-J4-70B(-RJ) 2625 1150
MR-J4-100B(-RJ) 3000 1190
MR-J4-200B(-RJ) 5400 2040
MR-J4-350B(-RJ) 10500 2600
MR-J4-500B(-RJ) 15000 4100
MR-J4-700B(-RJ) 21000 5900
MR-J4-11KB(-RJ) 40000 2600
MR-J4-15KB(-RJ) 50000 3500
MR-J4-22KB(-RJ) 56000 4300
MR-J4-60B4(-RJ) 1900 190
MR-J4-100B4(-RJ) 3500 200
MR-J4-200B4(-RJ) 5400 350
MR-J4-350B4(-RJ) 10500 730
MR-J4-500B4(-RJ) 15000 890
MR-J4-700B4(-RJ) 21000 1500
MR-J4-11KB4(-RJ) 40000 2400
MR-J4-15KB4(-RJ) 50000 3200
MR-J4-22KB4(-RJ) 56000 4200
Instantaneous maximum output means power which servo amplifier can output in maximum torque
at rated speed. You can examine margins to compare the values of following conditions and
instantaneous maximum output.
Even if driving at maximum torque with low speed in actual operation, the motor will not drive with
the maximum output. This can be handled as a margin.
The following shows the conditions of tolerance against instantaneous power failure.
1) Delta connection
For the 3-phase (L1/L2/L3) delta connection, an instantaneous power failure occurs in the voltage
between a pair of lines (e.g. between L1 and L2) among voltages between three pairs of lines
(between L1 and L2, L2 and L3, or L3 and L1).
2) Star connection
For the 3-phase (L1/L2/L3/neutral point N) star connection, an instantaneous power failure occurs
in the voltage between a pair of lines (e.g. between L1 and N) among voltages at six locations,
between three pairs of lines (between L1 and L2, L2 and L3, or L3 and L1) and between one of
the lines and the neutral point (between L1 and N, L2 and N, or L3 and N).
17. APPLICATION OF FUNCTIONS
17 - 65
(9) Lost motion compensation function
POINT
The lost motion compensation function is enabled only in the position control
mode.
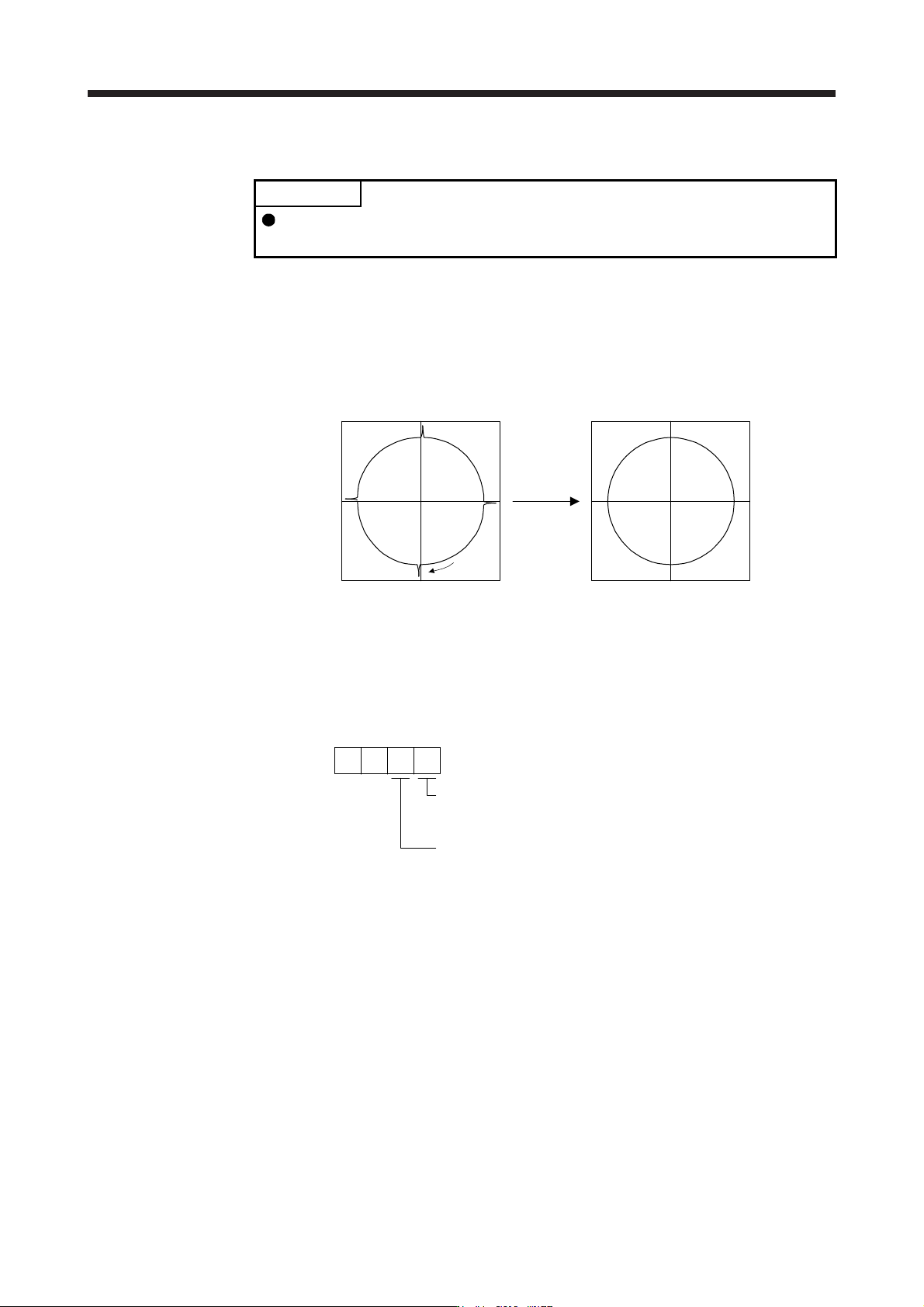
The lost motion compensation function corrects response delays (caused by a non-sensitive band due to
friction, twist, expansion, and backlash) caused when the machine travel direction is reversed. This
function contributes to improvement for protrusions that occur at a quadrant change and streaks that
occur at a quadrant change during circular cutting.
This function is effective when a high follow-up performance is required such as drawing an arc with an
X-Y table.
The locus before compensation The locus after compensation
Compensation
Travel
direction
(a) Parameter setting
Setting [Pr. PX36] to [Pr. PX42] enables the lost motion compensation function.
1) Lost motion compensation function selection ([Pr. PX40])
Select the lost motion compensation function.
Lost motion compensation selection
0: Lost motion compensation disabled
1: Lost motion compensation enabled
0
Unit setting of lost motion compensation non-sensitive band
0: 1 pulse unit
1: 1 kpulse unit
[Pr. PX40]
0
2) Lost motion compensation ([Pr. PX36]/[Pr. PX37])
Set the same value for the lost motion compensation for each of when the forward rotation
switches to the reverse rotation and when the reverse rotation switches to the forward rotation.
When the heights of protrusions differ depending on the travel direction, set the different
compensation for each travel direction. Set a value twice the usual friction torque and adjust the
value while checking protrusions.
3) Torque offset ([Pr. PX39])
For a vertical axis, unbalanced torque occurs due to the gravity. Although setting the torque offset
is usually unnecessary, setting unbalanced torque of a machine as a torque offset cancels the
unbalanced torque. The torque offset does not need to be set for a machine not generating
unbalanced torque. The torque offset cannot be used for linear servo motors and direct drive
motors. Set 0.00%.
17. APPLICATION OF FUNCTIONS
17 - 66
4) Lost motion compensation timing ([Pr. PX41])
You can set the delay time of the lost motion compensation start timing with this parameter.
When a protrusion occurs belatedly, set the lost motion compensation timing corresponding to the
protrusion occurrence timing.
5) Lost motion compensation non-sensitive band ([Pr. PX42])
When the travel direction reverses frequently around the zero speed, unnecessary lost motion
compensation is triggered by the travel direction switching. By setting the lost motion
compensation non-sensitive band, the speed is recognized as 0 when the fluctuation of the droop
pulse is the setting value or less.
When the value of this parameter is changed, the compensation timing is changed. Adjust the
value of Lost motion compensation timing ([Pr. PX41]).
6) Lost motion filter setting ([Pr. PX38])
Changing the value of this parameter is usually unnecessary. When a value other than 0.0 ms is
set in this parameter, the high-pass filter output value of the set time constant is applied to the
compensation and lost motion compensation continues.
(b) Adjustment procedure of the lost motion compensation function
1) Measuring the load current
Measure the load currents during the forward direction feed and reverse direction feed with MR
Configurator2.
2) Setting the lost motion compensation
Calculate the friction torque from the measurement result of (9) (b) 1) in this section and set a
value twice the friction torque in [Pr. PX36] and [Pr. PX37] as lost motion compensation.
Friction torque [%] =
2
|(load current during feed in the forward rotation direction [%]) -
(load current during feed in the reverse rotation direction [%])|
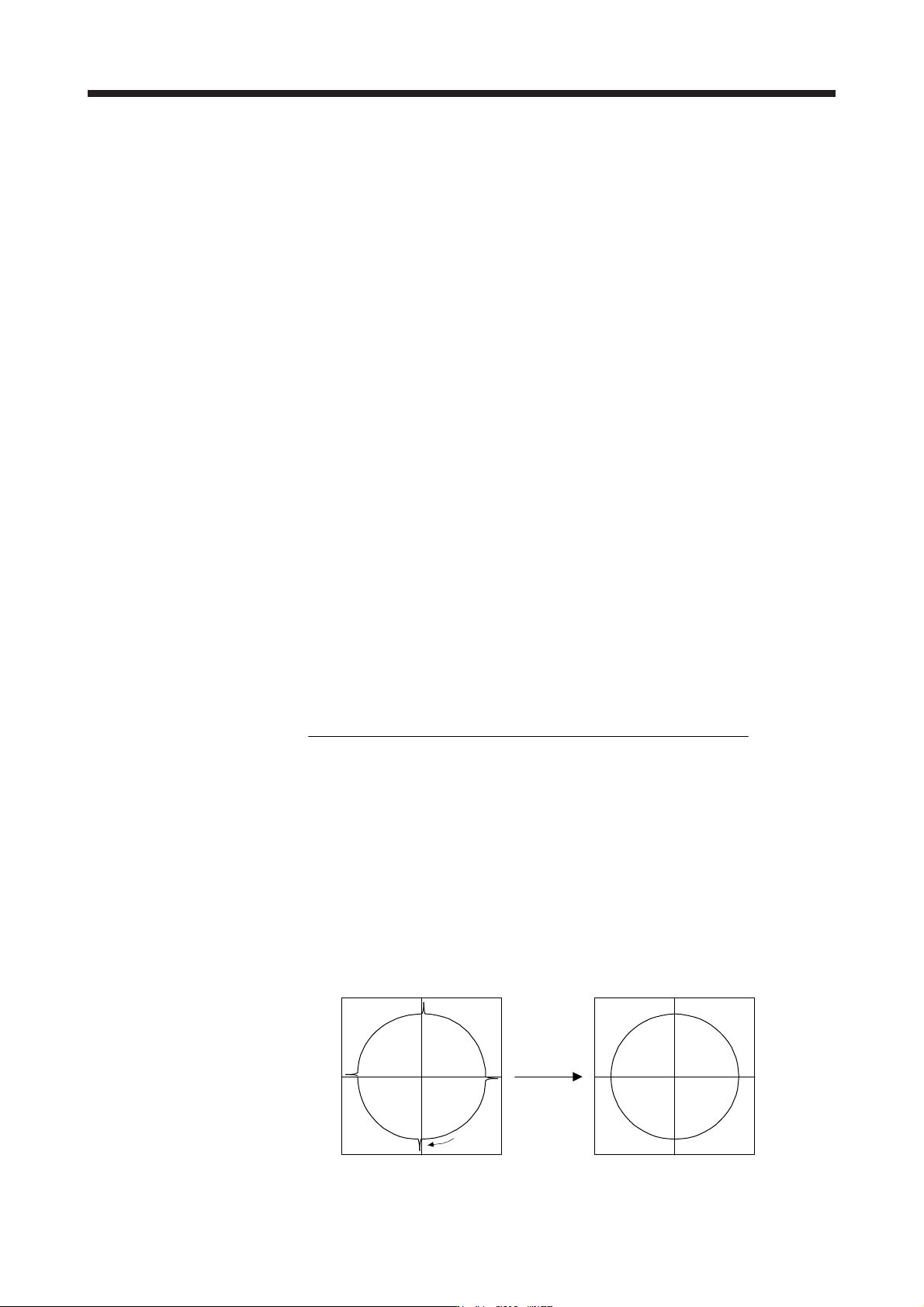
3) Checking protrusions
Drive the servo motor and check that the protrusions are corrected.
4) Adjusting the lost motion compensation
When protrusions still occur, the compensation is insufficient. Increase the lost motion
compensation by approximately 0.5% until the protrusions are eliminated. When notches occur,
the compensation is excessive. Decrease the lost motion compensation by approximately 0.5%
until the notches are eliminated. Different values can be set as the compensation for each of
when the forward rotation (CCW) switches to the reverse rotation (CW) and when the reverse
rotation (CW) switches to the forward rotation (CCW).
The locus before compensation The locus after compensation
Compensation
Travel
direction