KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第269页
4 - 165 4-12-2-2-2 部品種別による測定項目制限 部品種別による測定項目制限 部品種別による測定項目制限 部品種別による測定項目制限 部品データの部品種別により、測定できる項目が下表のように制限されます。 表 表 表 表 4-12-2-2-2 部品種毎の測定項目制限 部品種毎の測定項目制限 部品種毎の測定項目制限 部品種毎の測定項目制限 測定項目 測定項目 測定項目 測定項目 部品寸法 番号 番号 番号 番号 部品種…
4 - 164
②
部品高さ測定機能
部品高さをレーザにて測定を行います。また同時に最適なレーザ高さおよびチップ立ち判定値
も自動計算されます。以下に測定方式を示します。
表
表表
表
4-12-2-2-1-2
部品高さ測定方式
部品高さ測定方式部品高さ測定方式
部品高さ測定方式
対象部品
対象部品対象部品
対象部品
方式
方式方式
方式
レーザ認識部品
ビジョン認識部品
1.部品を上下する。
↓
2.部品の陰のあるところの範囲を高さ寸法とする。
③
部品バキューム圧測定機能
部品を吸着時バキューム圧を測定を行います。以下に測定方式を示します。
表
表表
表
4-12-2-2-1-3
部品バキューム圧測定方式
部品バキューム圧測定方式部品バキューム圧測定方式
部品バキューム圧測定方式
対象部品
対象部品対象部品
対象部品
方式
方式方式
方式
レーザ認識部品
ビジョン認識部品
1.部品吸着しヘッドバキューム圧レベルを取得する。
↓
2.得られた値をヘッドバキュームレベルとする。
④
リード情報測定機能
リード情報を画像装置にて測定を行います。この測定はビジョンセンタリングを行う部品のみ
実行でます。以下に測定方式を示します。
表
表表
表
4-12-2-2-1-4
リード情報測定方式
リード情報測定方式リード情報測定方式
リード情報測定方式
対象部品
対象部品対象部品
対象部品
方式
方式方式
方式
ビジョン認識部品
1.画像認識装置にて部品認識しリード情報を取得します。
↓
2.得られた値をリード寸法とする。
4 - 165
4-12-2-2-2
部品種別による測定項目制限
部品種別による測定項目制限部品種別による測定項目制限
部品種別による測定項目制限
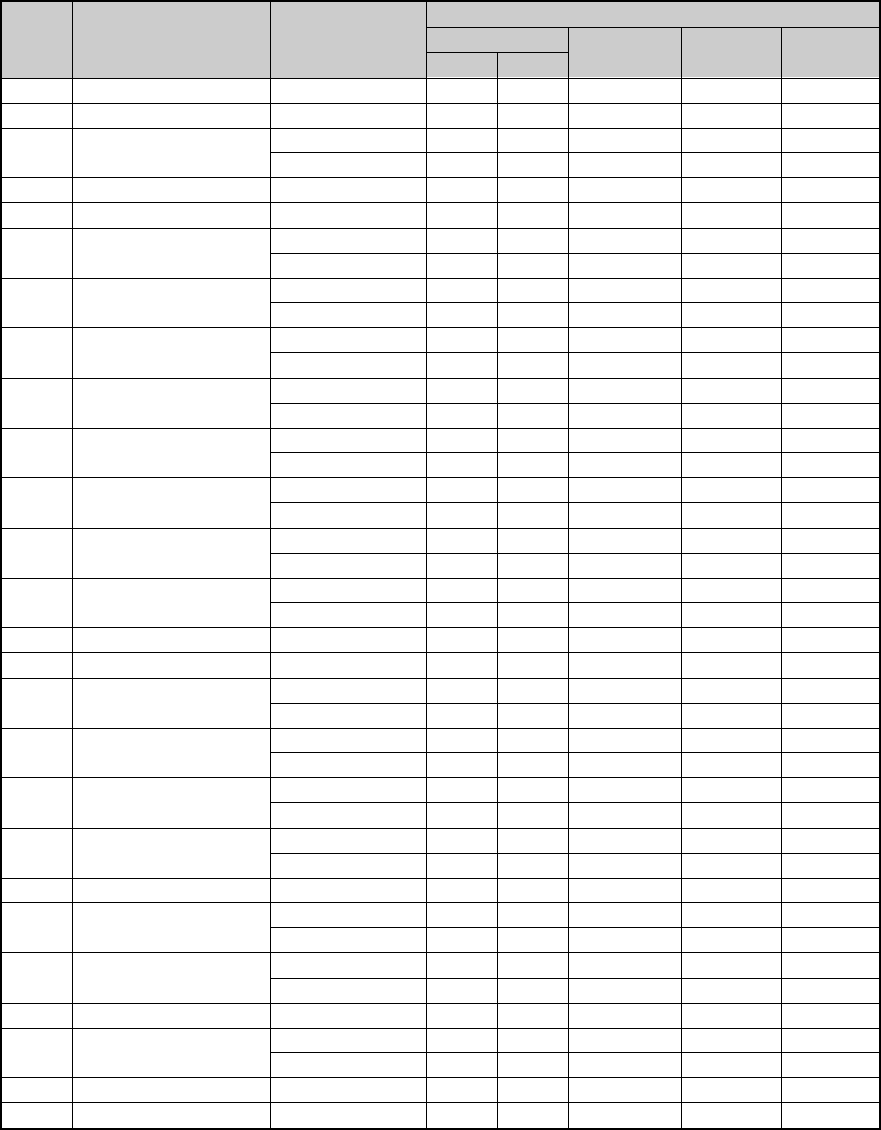
部品データの部品種別により、測定できる項目が下表のように制限されます。
表
表表
表
4-12-2-2-2
部品種毎の測定項目制限
部品種毎の測定項目制限部品種毎の測定項目制限
部品種毎の測定項目制限
測定項目
測定項目測定項目
測定項目
部品寸法
番号
番号番号
番号
部品種別
部品種別部品種別
部品種別
センタリング
センタリングセンタリング
センタリング
方式
方式方式
方式
縦横
高さ
吸着バキュ
ーム圧
レーザ
高さ
リード
情報
1
角チップ
レーザ
○
○
○
○
2
メルフ
レーザ
○
○
○
○
レーザ
○
○
○
3
アルミ電解コンデンサ
ビジョン
○
○
4
GaAsFET レーザ ○ ○ ○
5 SOT レーザ ○ ○ ○ ○
レーザ ○*3 ○ ○ ○ ○*3
6 SOP
ビジョン ○*1 ○ ○ ○*1
レーザ ○ ○ ○
7 SOJ
ビジョン ○ ○
レーザ ○*3 ○ ○ ○ ○*3
8 QFP
ビジョン ○*1 ○ ○ ○*1
レーザ ○ ○ ○
9 PLCC(QFJ)
ビジョン ○ ○
レーザ ○*3 ○ ○ ○ ○*3
10 PQFP(BQFP)
ビジョン ○*1 ○ ○ ○*1
レーザ ○*3 ○ ○ ○ ○*3
11 TSOP
ビジョン ○*1 ○ ○ ○*1
レーザ ○*3 ○ ○ ○ ○*3
12 TSOP2
ビジョン ○*1 ○ ○ ○*1
レーザ ○ ○ ○
13 BGA
ビジョン ○ ○
14 ネットワーク抵抗 レーザ ○ ○ ○
15 トリマ レーザ ○ ○ ○
レーザ ○ ○ ○ ○*2, *3
16 一方向リードコネクタ
ビジョン ○ ○ ○*1, *2
レーザ ○ ○ ○
17
Jリードリードソケッ
ト
ビジョン ○ ○
レーザ ○ ○ ○
18 ガルウィングソケット
ビジョン ○ ○
レーザ ○ ○ ○
19 バンパ付きソケット
ビジョン ○ ○
20 他の部品 レーザ ○ ○ ○
レーザ ○*3 ○ ○ ○ ○*2, *3
21 2方向リードコネクタ
ビジョン ○*1 ○ ○ ○*1, *2
レーザ ○*3 ○ ○ ○
22 ヒートシンク付き SOP
ビジョン ○*1 ○ ○
23 FBGA レーザ ○ ○ ○
レーザ ○ ○ ○
24 Zリードコネクタ
ビジョン ○ ○
25 拡張リードコネクタ ビジョン ○ ○
*1
リード本数が7本以上の部品のみです。(部品の外形寸法は、“
50mm
以下”です。)
*2
同リード形状で構成され,かつリード両端部にアーム,金具等が無い部品です。
*3
VCS装置を使用して測定します。
4 - 166
4-12-2-3
測定実行時の諸動作について
測定実行時の諸動作について測定実行時の諸動作について
測定実行時の諸動作について
①
吸着に使用するヘッド
吸着に使用するヘッドの選択については自動的にヘッドが選択されます。既に装着済みのノズ
ルを優先しノズル交換が少なくなるようヘッドを使用していきます。ノズルのヘッド装着状況
によっては測定毎に吸着するヘッドが異なることがあります。
②
測定後の部品返却
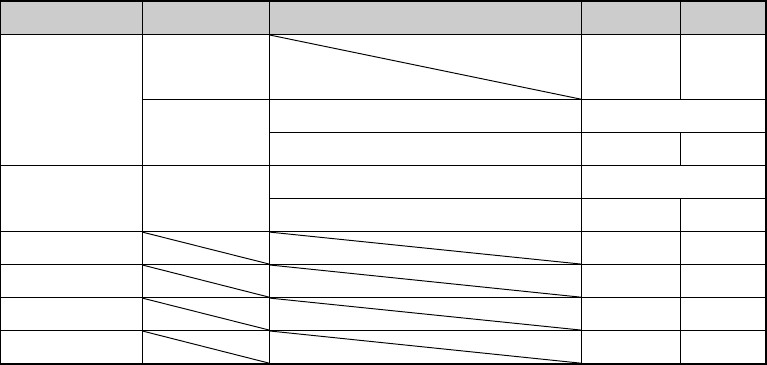
測定後の部品を元の位置に戻す場合と、破棄する場合があります。下表に示すよう荷姿によっ
て異なります。廃棄する場所は部品データの「部品廃棄」の設定に基づき廃棄します。また廃
棄方法が「IC回収ベルト」「部品保護」に設定されている場合は、設定に基づき廃棄します。
1
mm
以下の部品は、返却時に部品立ちになってしまったり、裏返ったりする可能性もあるた
め問い合わせによって動作を選びます。
表
表表
表
4-12-2-3
部品返却/廃棄条件
部品返却/廃棄条件部品返却/廃棄条件
部品返却/廃棄条件
荷姿
荷姿荷姿
荷姿
条件1
条件1条件1
条件1
条件
条件条件
条件
2
返却
返却返却
返却
廃棄
廃棄廃棄
廃棄
32mm
フィーダ
○
外形サイズ短辺
1mm
以下
問合わせ
*1
テープ
以外
外形サイズ短辺
1mm
以上
○
○
*2
外形サイズ短辺
1mm
以下
問合わせ
*1
バルク
外形サイズ短辺
1mm
以上
○
○
*2
ホルダ
○
○
*2
MTC
○
○
*2
MTS
○
○
*2
スティック
○
*1
ダイアログを表示して、部品を返却するか破棄するかを選択します。連続測定時には
開始前に問い合わせを行います。
*2
廃棄方法が「IC回収ベルト」「部品保護」の場合は廃棄を行います。
③
吸着する供給装置の選択
同一部品に複数の供給装置(吸着データ)がある場合、デフォルトでは最初に入力したデータ
から部品を吸着します。単独測定のみ供給装置を意図的に変更することも可能です。
④
吸着座標の変更
吸着がうまくいかない場合などに、手入力やHODデバイスを使用して座標ティーチングを行
い吸着座標を変更します。
⑤
手動吸着
吸着データがない場合に部品を手動でノズルに装着することができます。この場合、吸着座標
は入力不可となります。また、フィーダも操作できません。