KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第319页
5 - 5 5-3. 座標のティーチング 座標のティーチング 座標のティーチング 座標のティーチング 5-3-1. 基本操作方法 基本操作方法 基本操作方法 基本操作方法 ここでは,座標のティーチングの基本操作方法を説明します。 ① ティーチングしたいデータの位置にカーソルを移動させます。 XY軸のティーチングの場合には,XY軸両方の座標がティーチングされます。 Z軸のティーチングは,別個に行う必要があります。 図 図 図 図 5-…
5 - 4
注意
フィーダバンク認識を一度も行っていない場合に(原点復帰から,もしくはバン
ク下降し,上昇させた後から),吸着位置移動前にフィーダバンク認識実行時は,
ヘッドが供給装置の上を横切りますので,手や顔などを装置内に入れたり近づけ
ないで下さい。
特にティーチング,吸着追尾等のメニュー以外からの認識実行
時の動作には気をつけて下さい。
(2)
認識のティーチング
認識のティーチングで取得するデータを下記に示します。
①
BOCマーク形状,マーク寸法,プロジェクションデータの認識に必要なデータ,重心
を検出するエリア枠
②
ICのマーク形状,マーク寸法,プロジェクションデータの認識に必要なデータ,重心
を検出するエリア枠
1)
認識のティーチング中には,デバイスはCAMERA固定になり変更は出来ません。
2)
認識のティーチングは,原点出し未完了状態,サーボフリー状態で行う事が出来ません。
3)
予めマークのXY座標は入力しておく事が必要です。
注意
注意注意
注意
:
5 - 5
5-3. 座標のティーチング
座標のティーチング座標のティーチング
座標のティーチング
5-3-1.
基本操作方法
基本操作方法基本操作方法
基本操作方法
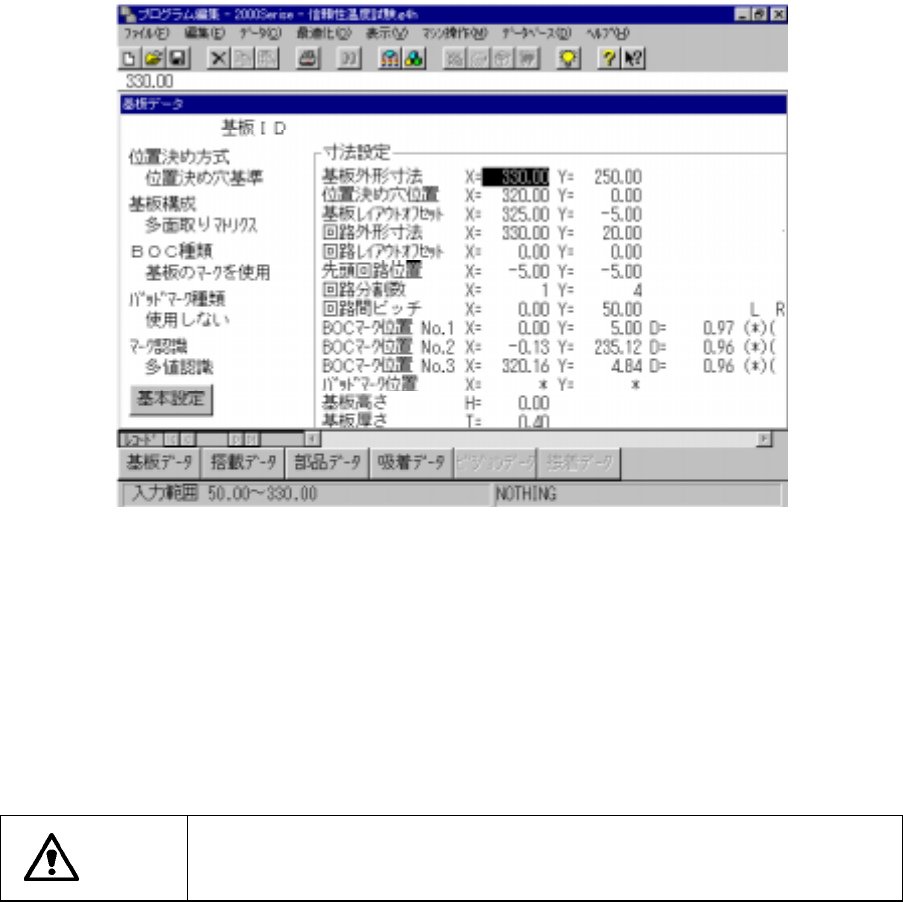
ここでは,座標のティーチングの基本操作方法を説明します。
①
ティーチングしたいデータの位置にカーソルを移動させます。
XY軸のティーチングの場合には,XY軸両方の座標がティーチングされます。
Z軸のティーチングは,別個に行う必要があります。
図
図図
図
5-3-1
座標ティーチング(1)
座標ティーチング(1)座標ティーチング(1)
座標ティーチング(1)
②
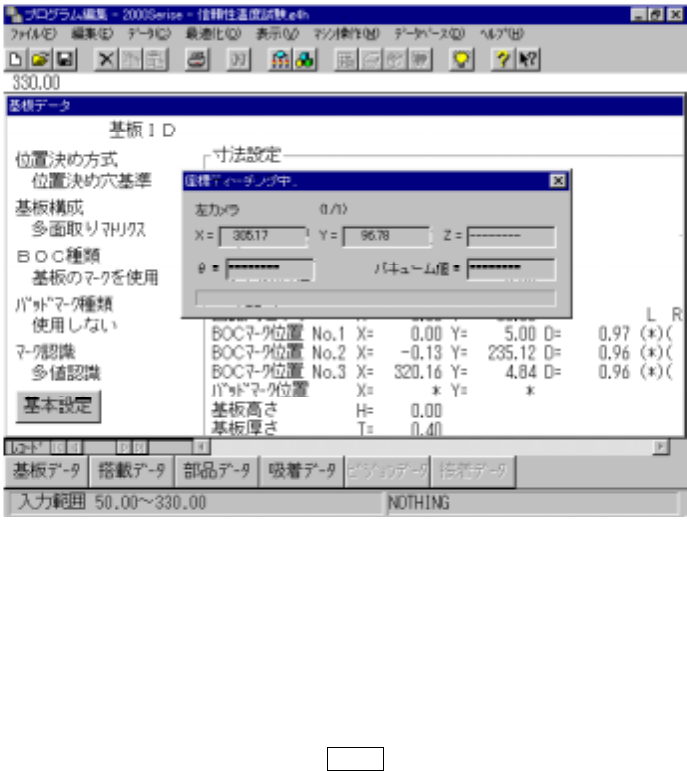
この状態で,HODのデバイス選択キーでティーチングの対象となるデバイスを選択します。
但し,選択されたデバイスが不適当な場合には,エラー音が鳴り,デバイスの選択の再入力
となります。
予め,座標が入力されている場合には,その座標値に選択したデバイスが移動します。
入力されていない場合には,デバイスは移動しません。
注意
人身への損害を防ぐ為,HOD操作中は装置内に手を入れたり,顔や頭を近づ
けないで下さい。
5 - 6
選択したデバイスがヘッドで,ノズルがティーチングする時に使用するノズルと異なる場合には,ノ
ズルの交換が生じます。
この時には,画面上に下記の情報が表示されます。
・
選択したデバイス名
・
選択したデバイスのXY座標値
・
選択したデバイスのZ座標値
・
選択したデバイスのθ値
・
選択したデバイスのバキューム値
また,HOD上のLCDにデバイス名が表示され,何のティーチングを行うのか確認する事ができます。
図
図図
図
5-3-2
座標ティーチング(2)
座標ティーチング(2)座標ティーチング(2)
座標ティーチング(2)
③
HODの軸駆動用キー(X
Y
軸,Z軸,θ軸移動キー)を使用し,選択したデバイスの移動
を行います。この時,デバイスを移動させる事によって画面上に表示されている数値(座標
値等)が変化します。
また,移動させたデバイスが移動限界に達した場合には,エラー音が鳴り,移動出来ない事
をオペレータに知らせます。
この時,XY軸の移動速度は,HODの
FAST
キーの押下によって変化します。