KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第345页
6 - 10 (2) 補正 補正 補正 補正 6-5. 試打 で搭載素子の 生産基板への 仮搭載を行い, 確認 した上で素子 とバッドのず れが生じてい る 場合,そのずれ分,生産モードの搭載オフセットのX,Y座標を補正します。 図 図 図 図 6-1-3-1 1 (3) 基板搬送時の注意事項 基板搬送時は以下の点に注意して操作して下さい。 3 モータ 搬送は, 3 バッ ファタイプ であり, これ に伴い各動作 制御 (基板自 動…
6 - 9
4) STOPセンサ⑥⑲及び C-OUTセンサ⑦⑳はストッパ組に取付けられている為ストッパの
位置と共に移動します。
5) ストッパ組を移動した時は,[6-1-3-2- (6) 外形基準の位置入力]を再度行って下さい。
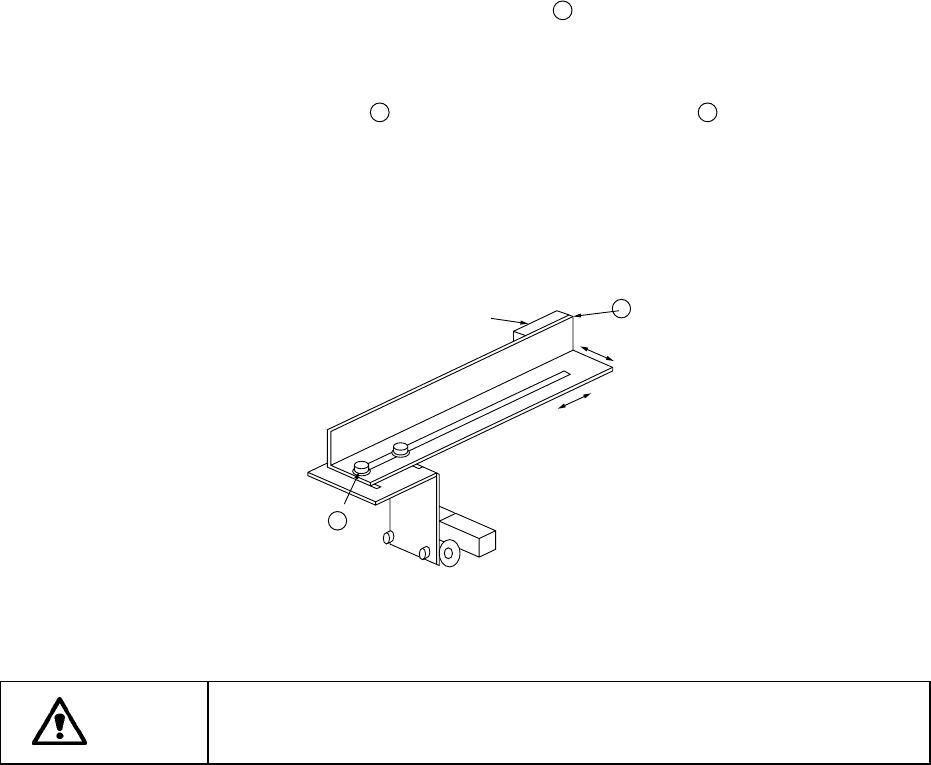
c. 基板検出センサ(図 6-1-3-10)
IN センサ①及び OUT センサ②はセンサブラケット
42
の取付けを変えることによって,検出
位置を変えることが出来ます。
1) 本体の電源をオフします。
2) さらに,センサブラケット
42
を固定している M3 六角穴ボルト
43
を緩め, 長穴に沿って
前後左右に移動することが出来ます。
3) 調整後は再び各取付けねじを締めて下さい。
4) マニュアル制御の搬送系または,プログラム編集の中の搬送にて基板にセットされるこ
とを確認して下さい。
図
図図
図 6-1-3-10
危険
不意の起動による事故を防ぐため,電源を切ってから行って下さい。
42
43
① ②
6 - 10
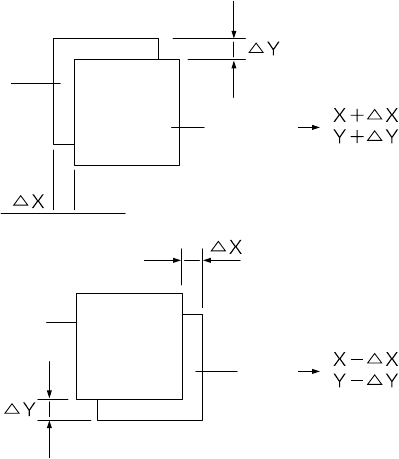
(2) 補正
補正補正
補正
6-5.試打で搭載素子の生産基板への仮搭載を行い,確認した上で素子とバッドのずれが生じている
場合,そのずれ分,生産モードの搭載オフセットのX,Y座標を補正します。
図
図図
図 6-1-3-11
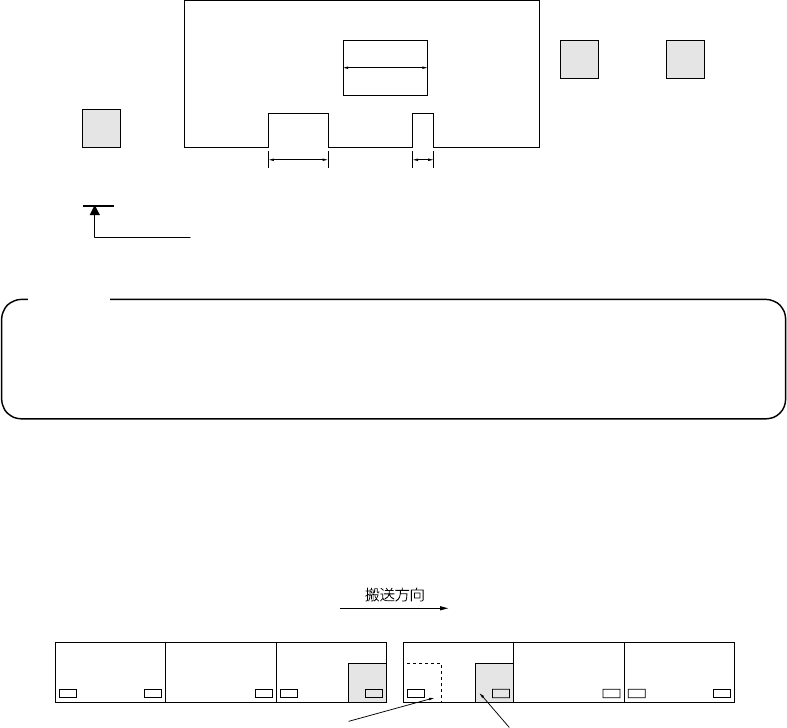
(3) 基板搬送時の注意事項
基板搬送時は以下の点に注意して操作して下さい。
3 モータ搬送は,3 バッファタイプであり,これに伴い各動作制御(基板自動搬送,マニュアルの
個別搬送,アイドル搬送)が行われます。基板のセットはインセンサ(入力バッファ入口センサ),
ストップセンサ(センタリングバッファ停止センサ),アウトセンサ(出力バッファ出口センサ)
の上にセットして下さい。
センサ間にセットすると搬送動作時に各種のエラーを発生します。
C.OUT センサ(センタリングバッファ出口センサ)の上にセットしてもエラーを発生します。
パッド
パッド
素子
素子
6 - 11
① 搬送センサ遅延(第7章マシンセットアップの 7-2-2-8.基板搬送)
IN
STOP C.OUT
W2
W1 W3
切り欠き長:W2
>W1>W3
W2に合わせて下さい。(一番長いものに合わせて下さい。)
(例)10mm あるいは 20ms を入力します。
• 基板搬送センサ遅延を必要以上長くしないで下さい。
• 特に,基板サイズ(X方向)と遅延設定の長さを合わせた値が最大基板サイズ(標
準サイズ 330,Lサイズ 410)より大きくならないように設定して下さい。
② IN センサ上に基板を置く場合,センサの赤色 LED 点灯を確認して下さい。
③ BOC マーク認識エラー等でストップした場合,まず前段階のマシンをポーズ等でストップさ
せてから,復帰作業を行って下さい。
④ <ライン構成の場合>
NG
CENTER OUTIN
#1
CENTER OUTIN
#2
⑤ ライン生産を行う場合は,スタート時に CENTER と OUT のバッファに基板を置かないで下
さい。(置いてある基板は生産終了基板として次の機械に送られます)
⑥ センタリングバッファが搬送動作中にストップ SW を押すと各バッファの基板はその時点で
停止します。(搬送動作終了を確認する表示が行われます)
終了する場合は確認を選択して下さい。(取消を選択すると,継続動作を行います)
(2010L,2010E)基板搬送仕様について
1. 生産モードでの基板搬送
1) 50 mm∼330 mm(基板X方向)の基板は標準仕様と同様の機能があります。
2) 331 mm(基板X方向)以上の基板は,自動的にセンタモータの速度が落ち(300 mm/s)
センタバッファへの基板搬入タイミングが,センタバッファの基板がストップセンサ
OFF 状態で搬入するようになります。
2. マニュアルモード,編集モードでの基板搬送
上記の 2)の状態で行われます。
#1の機械でOUTセンサ上で#2の機械に
送る基板がある場合は,#2の機械で生
産開始時にINセンサの上に基板をセッ
トしないで下さい
ウエイトセンサ上にセットすると,ウエイ
トセンサ上の基板がセンタリングバッフ
ァにセットされてから前段の基板がイン
バッファにセットされます。
注意:
注意:注意:
注意: