KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第29页
1 - 10 略語の説明 略語の説明 略語の説明 略語の説明 ATC : 自動ツール交換装置 (Auto T ool Changer) OCC : 位置補正カメラ (Off set Correctio n Camera) EPU : 外部プログラミング装置 (Ext ernal Program m ing Unit) HLC : ホストラインコンピュータ (Hos t Line Com puter) HOD : ハンドヘルド操作盤 (H…
1 - 9
1-1-3.
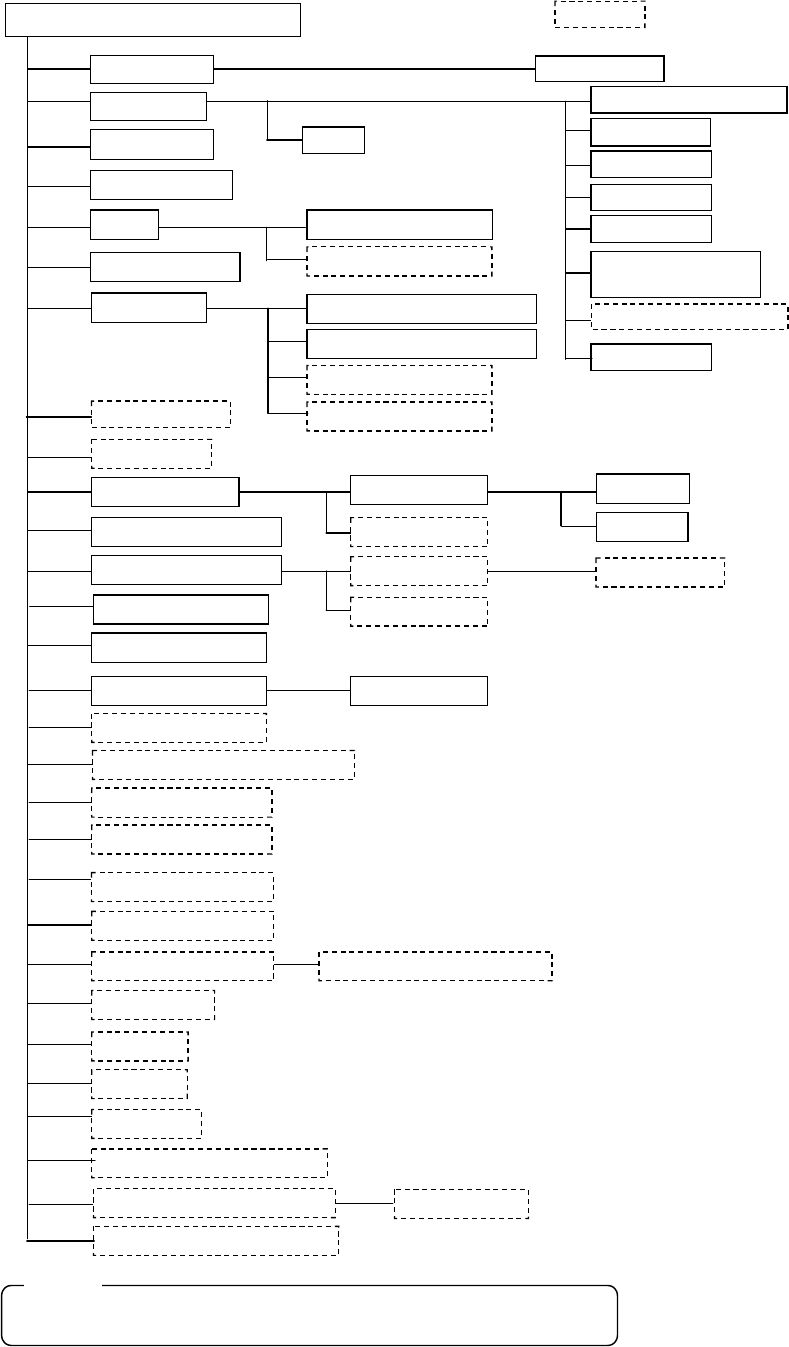
システム構成
システム構成システム構成
システム構成
(
非常停止ボタン
オプション
搭載ヘッド L
レーザー認識ヘッド(MNL A)
高さ測定機能(HMS)
UPS
電源ユニット
カラーLCDディスプレイ
キーボード
トラックボール
FDD
HDD
100BASE / 10BASE T
イーサーネットボード
背面オペレーションユニット
エリアセンサ
I/ O制御ユニット
CP U ボード
モータ制御ユニット
筐体 シグナルライト
シグナルライトブザー付き
X−Y位置決め装置
KE- 2010M / KE- 2010L/ KE- 2010E
スペア交換台機能
フィーダ浮き検出装置
空気圧機器配管系
画像認識装置
一括交換台機能
フィーダバンク・ドライバ
ベリフィケーション機能
ビジョンモニタ
基板搬送装置
搭載ステーション
フィーダポジションインジケータ機能
オートテープカッタ
バルクフィーダ
テープフィーダ
スティックフィーダ
ノンストップオレーション機能
HL C(ホストラインコンピュータ)
部品 20mm 対応
ピン基準
外形基準
IC
回収ベルト
トレイホルダ
DTS
TR5S N / TR5DN
ATC
(自動ツール交換装置)
段積みスティックフィーダ
EP U(外部プログラミングユニット)
TR4S N
フィーダ置き台
自動基板幅調整装置
オフセットコレクションカメラ
バッドマークリーダ
SOT
ボードビューア
*1の付いているオプションは,工場出荷オプションになります。
注意
注意注意
注意
:
1 - 10
略語の説明
略語の説明略語の説明
略語の説明
ATC
:
自動ツール交換装置
(Auto Tool Changer)
OCC
:
位置補正カメラ
(Offset Correction Camera)
EPU
:
外部プログラミング装置
(External Programming Unit)
HLC
:
ホストラインコンピュータ
(Host Line Computer)
HOD
:
ハンドヘルド操作盤
(Handheld Operating Device)
PWB
:
基板
(Print Wiring Board)
HMS
:
高さ計測装置
(Height Measurement System)
CVS
:
部品ベリフィケーション(
Component Verification System)
FPI
:
フィーダポジションインジケータ
(Feeder Position Indicator)
MNLA
:
マルチノズルレーザアライン
(Multi Nozzle Laser Align)
DTS : ダブルトレーサーバ(
Double Tray Server
)
MTS : マトリクストレーサーバ(
Matrix Tray Server
)
MTC : マトリクストレーチェンジャ(
Matrix Tray Changer
)
BMR : バッドマークリーダ(
Bad Mark Reader
)
1 - 11
1-1-4.
機械仕様
機械仕様機械仕様
機械仕様
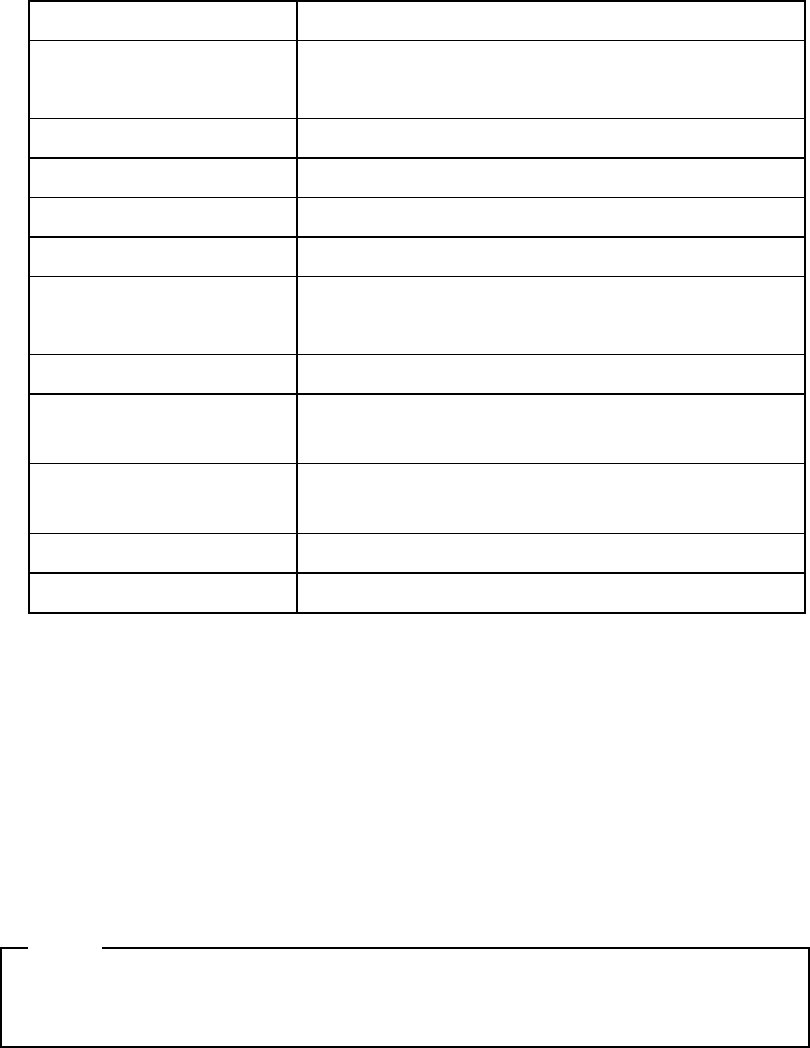
(1)
搭載精度
分品種による搭載精度は下表の様になります。
部品によって,レーザアライン検出部にエッジがあるものや,モールドにバリ等のあるもの,ま
た,吸着部に対して検出部が固定されていないものについては,上記精度より悪くなる場合があ
ります。
表
表表
表
1-1-4-1
単位:
mm
対象部品
KE-2010
MNLA ヘッド(レーザ認識補正)
部品サイズ□20mm 以下
角チップ ± 0.08
メルフ ± 0.1
SOT ± 0.15
アルミ電解コンデンサ ± 0.3
SOP リード直角方向:± 0.15(バリ側 0.15 以下)
リード平行方向:±0.2
PLCC,SOJ ± 0.2
QFP,TSOP
(ピッチ 0.8 以上)
± 0.12
QFP,TSOP
(ピッチ 0.65 以上)
± 0.09
BGA ± 0.2
その他大型部品 ± 0.3
(2) 搭載サイクルタイム
最適時の搭載サイクルタイムは,以下の様になります。実際に搭載した場合のサイクルタイムは,
基板のサイズや,ノズル交換回数によって異なります。
5ノズル同時吸着同時搭載時,レーザ認識
小型チップ部品
11,000
部品/時間(
0.33
秒/部品)
5部品同時吸着,1 部品ずつ同時搭載により 330×250 mm の基板のほぼ全体に,搭載し
た時の概算値
定義