KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第293页
4 - 189 2) 現在の搭載位置 ① ステーション( KE2030 のみ) 追尾中のステーション ② ステップ番号 追尾中の搭載データ番号 ③ 部品ID 追尾中の部品ID ④ 部品名 追尾中の部品名 ⑤ 回路番号 追尾中の回路/回路総数 3) 搭載座標 追尾中の搭載座標です。座標値は手入力またはティーチングで変更できます。 4) 設定/取消 座標値を手入力また はティーチングで 変更した後に有効 になります。<設 定>を押した場…
4 - 188
(3)
搭載座標位置カメラ追尾の実行中
搭載座標位置カメラ追尾の実行中搭載座標位置カメラ追尾の実行中
搭載座標位置カメラ追尾の実行中
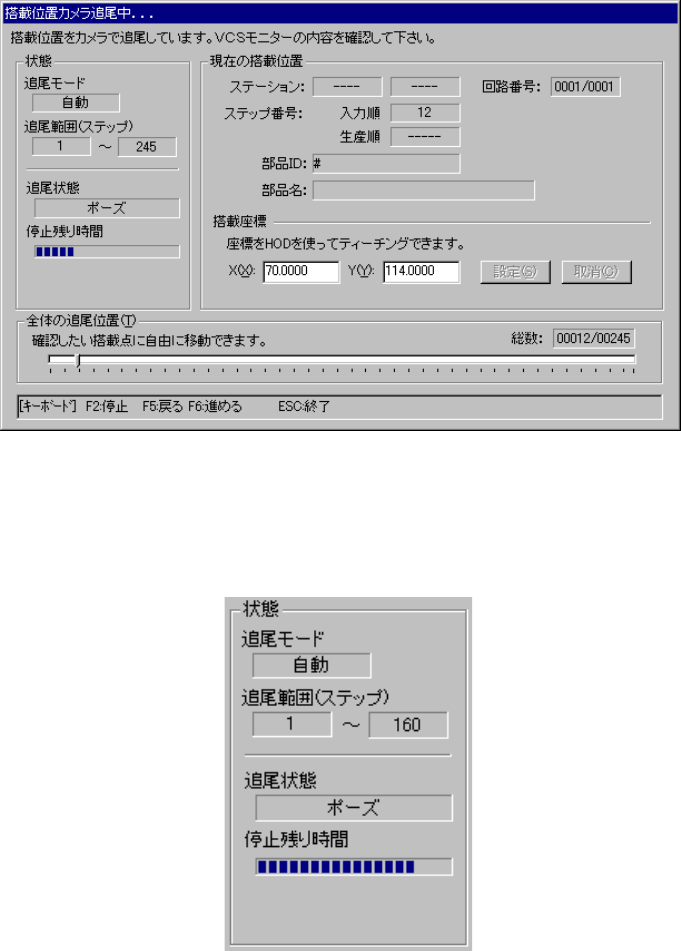
実行後,各搭載座標の追尾中は以下のダイアログが表示されます。
図
図図
図
4-12-4-3-3
搭載位置カメラ追尾中ダイアログ
搭載位置カメラ追尾中ダイアログ搭載位置カメラ追尾中ダイアログ
搭載位置カメラ追尾中ダイアログ
1)
状態
①
追尾モード
送り方法で設定した「手動」か「自動」かが表示されます。
②
追尾範囲
全搭載データの場合は「最初」「最後」が表示されます。追尾範囲を変更した場合
はその番号が表示されます。
③
追尾状態
「動作中」は,軸が移動中であることを示します。「ポーズ」は自動送りでの一時
停止中であることを示します。「停止」は手動送りまたは意図的に停止させたとき
を示します。「軸待避中」は軸を安全位置に移動していることを示します。「マー
ク認識中」はICマークを認識していることを示します。
④
停止残り時間
自動送りでの一時停止残り時間をプログレスバーで表示します。
4 - 189
2)
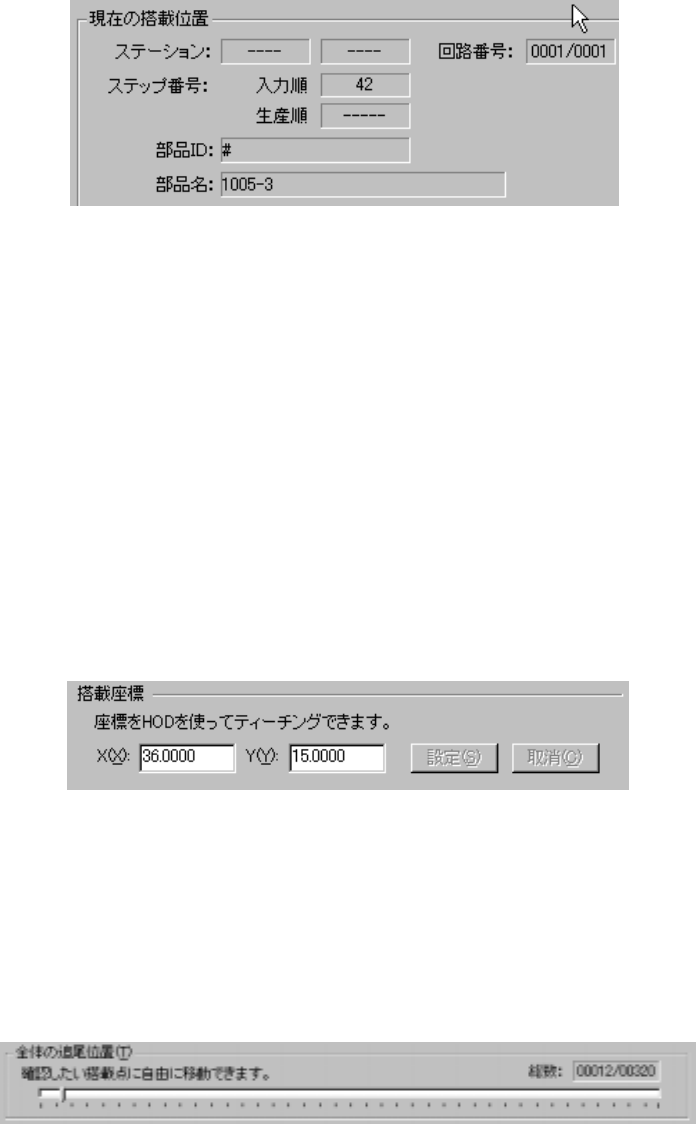
現在の搭載位置
①
ステーション(
KE2030
のみ)
追尾中のステーション
②
ステップ番号
追尾中の搭載データ番号
③
部品ID
追尾中の部品ID
④
部品名
追尾中の部品名
⑤
回路番号
追尾中の回路/回路総数
3)
搭載座標
追尾中の搭載座標です。座標値は手入力またはティーチングで変更できます。
4)
設定/取消
座標値を手入力またはティーチングで変更した後に有効になります。<設定>を押した場
合は,搭載データに格納されます。また変更値を格納したくない場合は<取消>を押して
下さい。
5)
全体の追尾位置
追尾位置が進むにつれ一つづつ進みます。停止中はこのスライダーを自由に移動させるこ
とで前に戻ったり,次に進めたりすることができます。
4 - 190
(4)
追尾中の操作
追尾中の操作追尾中の操作
追尾中の操作
実行中は以下のキー/スイッチを使って動作を制御できます。
操作
操作操作
操作
キーボード
キーボードキーボード
キーボード
オペレーションパネル
オペレーションパネルオペレーションパネル
オペレーションパネル
HOD
HODHOD
HOD
追尾の開始
F1
スタートボタン
ENTER
追尾の停止
F2
ストップボタン
PAUSE
前点への移動
F5
PREVIOUS
次点への移動 F6 NEXT
ベリファイ検査 F7
SOT検査 F8
データ検査 F9
終了 停止中にESC 停止中にストップボタン 停止中に CANCEL
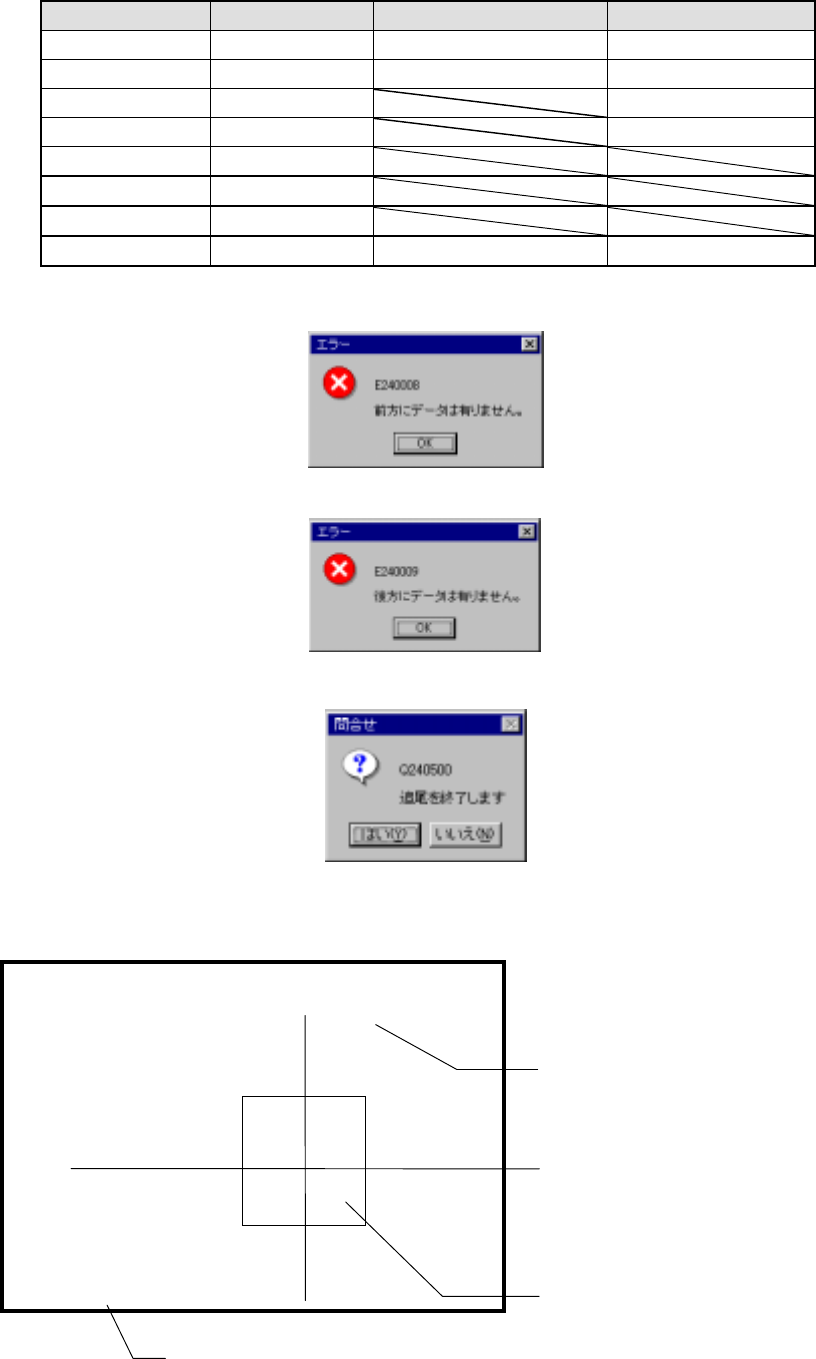
前点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
次点への移動でデータがそれ以上ない場合は以下のダイアログが表示されます。
上記の操作で終了させた場合は以下のダイアログが表示されます。
(5)
モニター表示
モニター表示モニター表示
モニター表示
実行中は各搭載点毎に以下の情報がモニター出力されます。
------- PLACE XY TRACE -------
Station:L またはR [ CENTER ]
Cur.No:回路番号
Pla.No :搭載番号
Compo:部品名
Angle :搭載角度
Pos X:座標 Y:座標
[CENTER」
部品中心を示している
[TOP-L][TOP-R][BTM-L][BTM-R]
部品の四隅を示します。
それぞれ上面左,上面右,下面左,
下面右を表します。
原点復帰位置からの座標を示しています。
部品の中心や,部品の四隅を示しています。