KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第436页
6 – 101 (4) 操作モード 操作モードの遷移を下記に示します。 ① 手動送りの場合 ② 自動送りの場合 ● ビジョンカメラの情報 ビジョンカメラの情報 ビジョンカメラの情報 ビジョンカメラの情報 ビジョンカメラには下記の2種の情報が表示されます。 ① 吸着位置の生画像 ② カーソル(十字カーソル又は,ウィンドウカーソル) ここで表示されるウィ ンドウカーソ ルのサイズは 部品外形寸法 と一致し, ビジョ ンカメラ でとら…
6 – 100
②
吸着位置の変更
停止状態であれば,HODの
CAMERA
キーを押すことにより吸着位置のティーチングが出来
ます。
また直接テンキーから吸着位置を変更することも出来ます。
手入力の場合の入力可能範囲は,表示されている値に対して±
3 mm
です。
入力後,設定ボタンを押した時点でヘッドが移動します。
ティーチングの場合は,制限はありません。
③ 前吸着位置へ戻る
ポーズ状態であれば,HODの
PREVIOUS
キーを押すことにより前吸着位置へ戻ることがで
きます。前吸着位置へ戻った後もポーズ状態は保持されます。
④ 次吸着位置へ進む
ポーズ状態であれば,HODの
NEXT
キーを押下することにより次吸着位置へ進むことが出
来ます。次吸着位置へ進んだ後もポーズ状態は保持されます。
最後の吸着位置でさらに
NEXT
キーが押下された場合は,メッセージボックスを表示してオ
ペレータに最後であることを通知します。
図
図図
図
6-5-3-2
最終吸着位置メッセージボックス
最終吸着位置メッセージボックス最終吸着位置メッセージボックス
最終吸着位置メッセージボックス
最後の吸着位置で更に<START>スイッチが押下された場合は,図
6-5-3-3
を表示して生
産動作に入るかどうかオペレータに問い合わせします。
図
図図
図
6-5-3-3
追尾動作終了確認ダイアログ
追尾動作終了確認ダイアログ追尾動作終了確認ダイアログ
追尾動作終了確認ダイアログ
(2)
手動送り
吸着カメラ追尾で,手動送りが選択されていれば試打実行前,カメラが第一試打吸着点へ移動
し,モニタに吸着する状態を映しポーズ状態となります。
ポーズ状態の画面は,自動送りと同様。
(3)
吸着カメラ追尾を行う対象,追尾順序
吸着カメラ追尾はフロントの
1
番から
79
番,リアの
79
番から
1
番の順に追尾動作を行う。
また,追尾動作は試打範囲(指定搭載点/指定部品)には関係なく,吸着データで使用する吸
着点は全て対象としています。
6 – 101
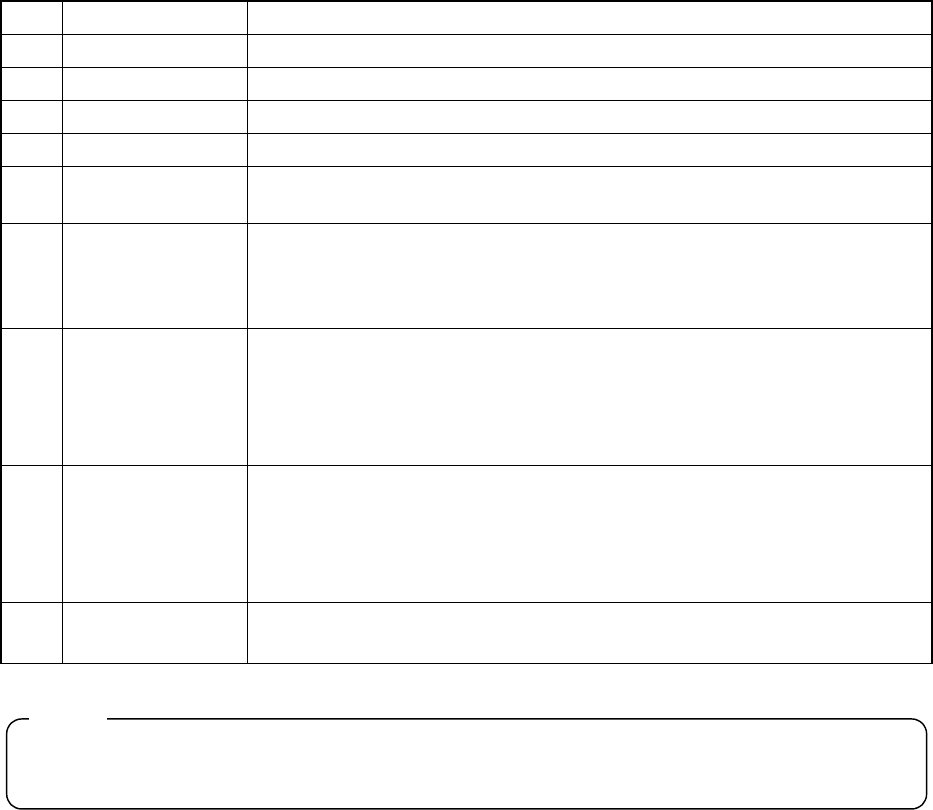
(4)
操作モード
操作モードの遷移を下記に示します。
①
手動送りの場合
②
自動送りの場合
●
ビジョンカメラの情報
ビジョンカメラの情報ビジョンカメラの情報
ビジョンカメラの情報
ビジョンカメラには下記の2種の情報が表示されます。
①
吸着位置の生画像
②
カーソル(十字カーソル又は,ウィンドウカーソル)
ここで表示されるウィンドウカーソルのサイズは部品外形寸法と一致し,ビジョンカメラ
でとらえられない大きな部品や吸着角度が
90°
の倍数でなくてウィンドウカーソルを表示
できない部品は,ウィンドウカーソルを表示しないで十字カーソルを表示できない部品は,
ウィンドウカーソルを表示しないで十字カーソルを表示します。
ビジョン画面に表示される情報の表示条件
ビジョン画面に表示される情報の表示条件ビジョン画面に表示される情報の表示条件
ビジョン画面に表示される情報の表示条件
項目 区分 表示条件
十字カーソル 吸着角度が 0°,90°,180°,270°以外の部品と外形寸法のどちらか
が 5.0 mm を超える部品
カーソル
ウィンドウカーソル 吸着角度が 0°,90°,180°,270°の部品
条件設定
連続実行
一時停止 ティーチング
1点実行
STARTスイッチ
STOPスイッチ
生産開始
STOPスイッチ
HODデバイスキー
ティーチング終了
移動完了
STARTスイッチ
CANCEL PAUSE PAUSE
CANCEL
NEXT PREVIOUS
条件設定
1点実行
一時停止 ティーチング
STARTスイッチ
STOPスイッチ
生産開始
HODデバイスキー
ティーチング終了
STARTスイッチ
CANCEL NEXT
PREVIOUS
移動完了
6 – 102
6-6.
空打
空打空打
空打
メニューバーの
[
生産条件−空打
]
を選択すると,基板生産の空打条件設定画面になります。
(1)
設定項目
NO 項目
項目項目
項目 内容
内容内容
内容
1 設定項目切替 基板生産条件ダイアログ・試打ダイアログ・空打ダイアログの切替えが行えます。
2 生産予定枚数 空打を行う基板枚数を設定します。
3 シーケンス 搭載シーケンスを入力順か最適化順かの選択します。
4 実行モード 連続生産かステップ動作かを選択します。
5 搭載オフセット 全搭載位置の一括オフセットを指定する。本オフセットが搭載位置に加算され搭載
されます。
6 ステップNO 搭載するデータの範囲を開始行番号と終了行番号で指定します。
搭載データの入力順で指定します。
シーケンスが最適化順のときは,開始行,終了行番号は最適化データ番号になりま
す。
7 搭載カメラ追尾 一枚基板を空打後に,カメラによる搭載点の追尾を行うか否か,また行う場合に自
動送りか手動送りかを設定します。
しない :追尾を行いません。
自動送り :自動で搭載点を追尾します
手動送り :搭載点で停止しオペレータの入力で次点へ移動します。
8 吸着カメラ追尾 基板を空打前に,カメラによる吸着点の追尾を行うか否か,また行う場合に自動送
りか手動送りかを設定します。
しない :追尾を行いません。
自動送り :自動で吸着点を追尾します
手動送り :吸着点で停止しオペレータの入力で次点へ移動します。
9 自動送り間隔 追尾が自動送りの場合,停止位置での停止時間を設定します。
(単位は,10msec が1となります)
基準ピン補正の項は,操作オプションで設定した状態を表示するのみで,ここでは変更できま
せん。
注意
注意注意
注意
: