KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第316页
5 - 2 5-2. 機能 機能 機能 機能 (1) 座標のティーチング ティーチングで使用出来るデバイスとティーチング項目を,表 5-1 に示します。 但し,オプションで装備されてい ないデバイス及びマシンセ ットアップの使用しないユ ニッ トで指定されているデバイスは,選択できません。 表 表 表 表 5-1. ティーチング対 ティーチング対 ティーチング対 ティーチング対象デバイスとティーチング項目 象デバイスとティーチング項…
5 - 1
第
第第
第 5 章
章章
章
ティーチング
ティーチングティーチング
ティーチング
本章では,ティーチングの操作方法について,説明します。
ティーチングには,座標のティーチングと認識の為のティーチングの
2
種類があります。
これら
2
種類のティーチングの基本となるHODの操作方法から説明します。
5-1.
HODの使い方
HODの使い方HODの使い方
HODの使い方
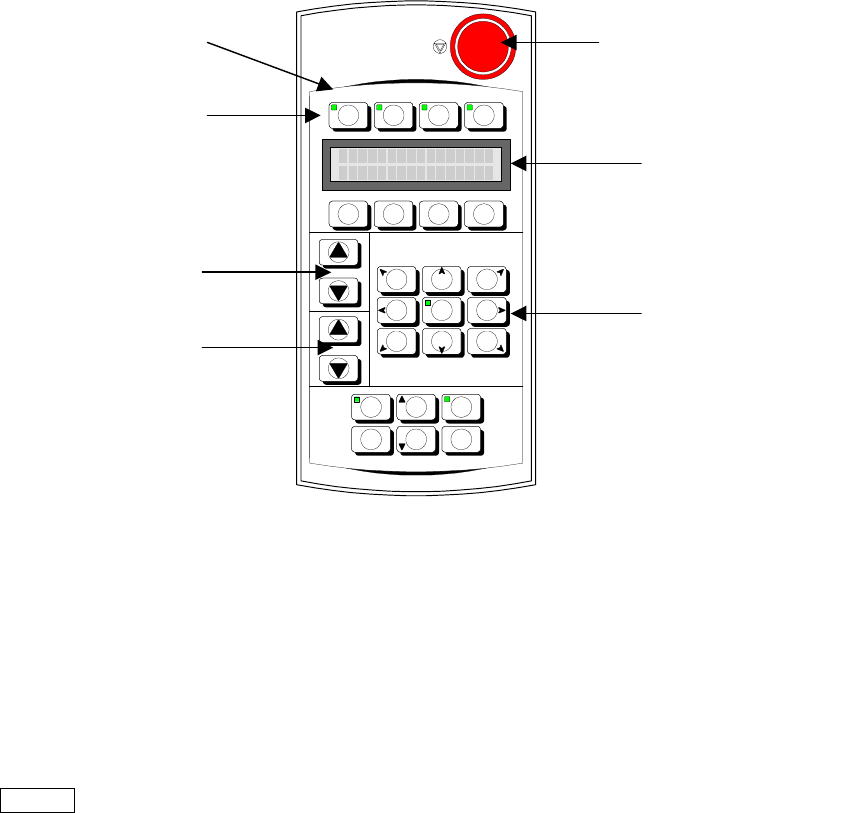
HODの外観を図
5-1
に示します。
図
図図
図
5-1.
HOD外観図
HOD外観図HOD外観図
HOD外観図
デバイスネームキーで,CAMERA,HMS以外のデバイスの選択に用います。
その選択方法
は,二つのデバイスネームキー(上下方向)キーによって,LCD上に表示されるデバイス名によ
って選択確定します。
No.キーによってデバイス名+デバイス番号の表示(選択)を行います。
ENTER
キーは,選択確定する場合に用います。
移動キーは,XY軸移動を行う場合に用います。
-X+Y +Z+Y +X+Y
-
θ
θθ
θ
-X +
θ
θθ
θ
+X
-X-Y -Z-Y +X-Y
FAST
DEV.NAME
No.
J U K I
F1 F2 F3 F4
NEXT
PREVIOUS PAUSEWINDOW
CANCEL ENTER
HMS CAMERA
VACUUM
ON/OFF
HEAD
エマージェンシースイッチ
LCD
デバイス選択キー
移動キー
ファンクションキー
No.キー
デバイスネームキー
5 - 2
5-2.
機能
機能機能
機能
(1)
座標のティーチング
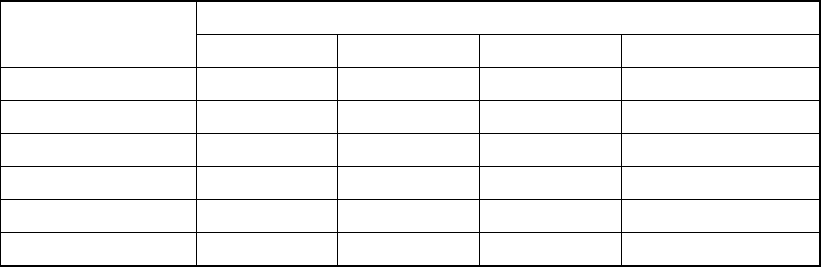
ティーチングで使用出来るデバイスとティーチング項目を,表
5-1
に示します。
但し,オプションで装備されていないデバイス及びマシンセットアップの使用しないユニッ
トで指定されているデバイスは,選択できません。
表
表表
表
5-1.
ティーチング対
ティーチング対ティーチング対
ティーチング対象デバイスとティーチング項目
象デバイスとティーチング項目象デバイスとティーチング項目
象デバイスとティーチング項目
ティーチング座標(○はティーチング可) ティーチング
デバイス
XY軸座標
Z軸座標
θ軸座標
マーク認識パラメータ
MNLAヘッド ○ ○
FMLAヘッド ○ ○
バッドマークセンサ ○
OCCカメラ ○ ○
OCCカメラ2 ○ ○
HMS ○ ○
ここで,デバイスで選択キー1,2,3
POINT
キーは,ティーチングデバイスとしてOCC
カメラが選択された時に有効になります。但し,1
POINT
キーはデバイスが選択された時点
でのデフォルトになります。
また,座標のティーチング中,HODの他のデバイスを押下すると,現在のデバイスが指し
ている座標に,新たに選択されたデバイスが移動し,ティーチングのデバイスを変更する事
が出来ます。
5 - 3
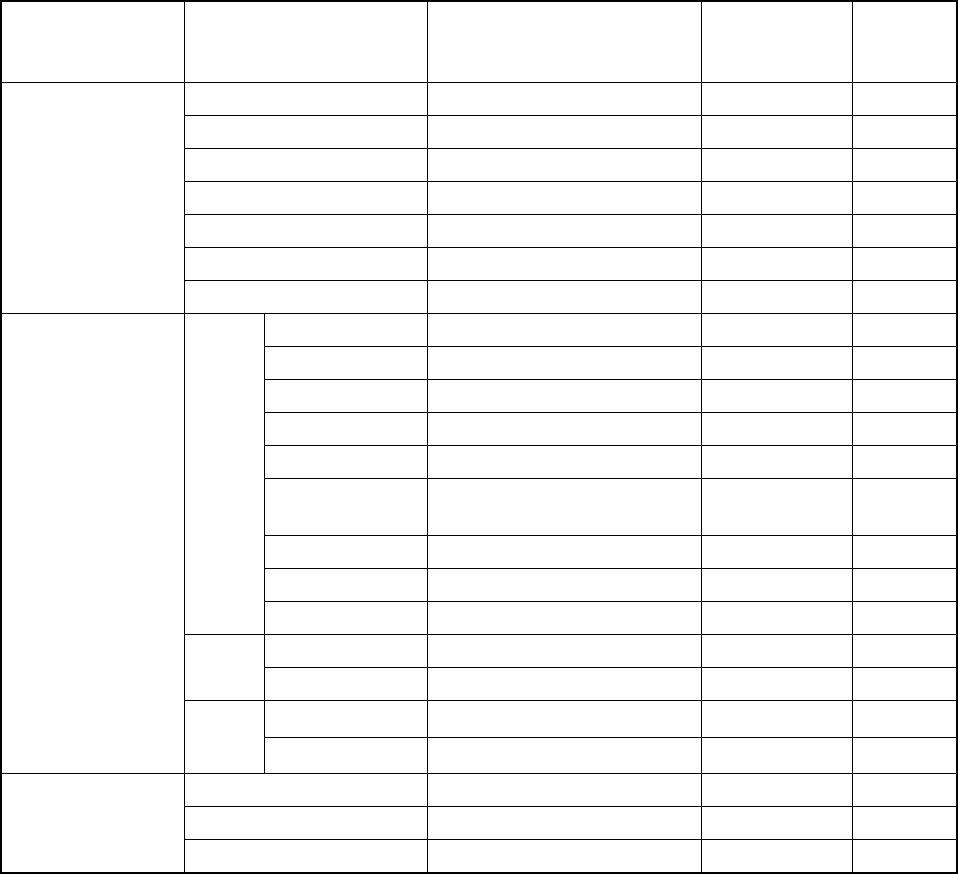
ティーチング項目の詳細を表
5-2
に纏めました。
表
表表
表
5-2.
ティーチング項目
ティーチング項目ティーチング項目
ティーチング項目
作業区分 データ項目 データの原点
BOC
アラインメント
で補正
フィーダ
バンク認
識で補正
基準ピンの位置 XY座標原点
従動ピンの位置 XY座標原点
外形基準の位置 XY座標原点
MTC シャトル吸着位置 XY座標原点
部品廃棄位置 XY座標原点
ノズル無しバキューム値
マシンセットアップ
ヘッド待機位置 XY座標原点
位置決め穴位置 基板位置基準 ○
基板レイアウトオフセット 基板位置基準 ○
先頭回路位置 基板位置基準 ○
回路レイアウトオフセット 基板位置基準 ○
BOC マーク位置 基板位置基準又は回路位置基準 *1 ○
BOC マーク認識
パラメータ
バッドマーク位置 回路位置基準 ○
基板高さ
基 板
データ
基板厚さ
搭載位置 基板位置基準又は回路位置基準 *2 ○ 搭 載
データ
ICマーク位置 基板位置基準又は回路位置基準 *2 ○
吸着位置XY XY座標原点又はリア原点 *3 ○
生産プログラム
吸 着
データ
吸着位置Z Z軸原点(基板上面)
搭載位置XY 基板位置基準又は回路位置基準 *2 ○
吸着位置XY XY座標原点又はリア原点 *3 ○
生産
吸着位置Z Z軸原点(基板上面)
*1
基板構成が一面取りの場合は,基板位置基準,多面取りマトリックス及び多面取り非マトリ
ックスの場合には,BOCの種類が基板のマークの使用であれば基板位置基準,回路毎のB
OCを使用であれば,回路位置基準をデータの原点にします。
*2
基板構成が一面取りの場合には基板位置基準,多面取りマトリックス及び多面取り非マトリ
ックスの場合には,回路位置基準をデータの原点とします。
*3
機械前面に取付けられる部品供給装置の吸着位置はXY座標原点を,機械後面に取付けられ
る場合には,リア原点をデータの原点とします。