KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第358页
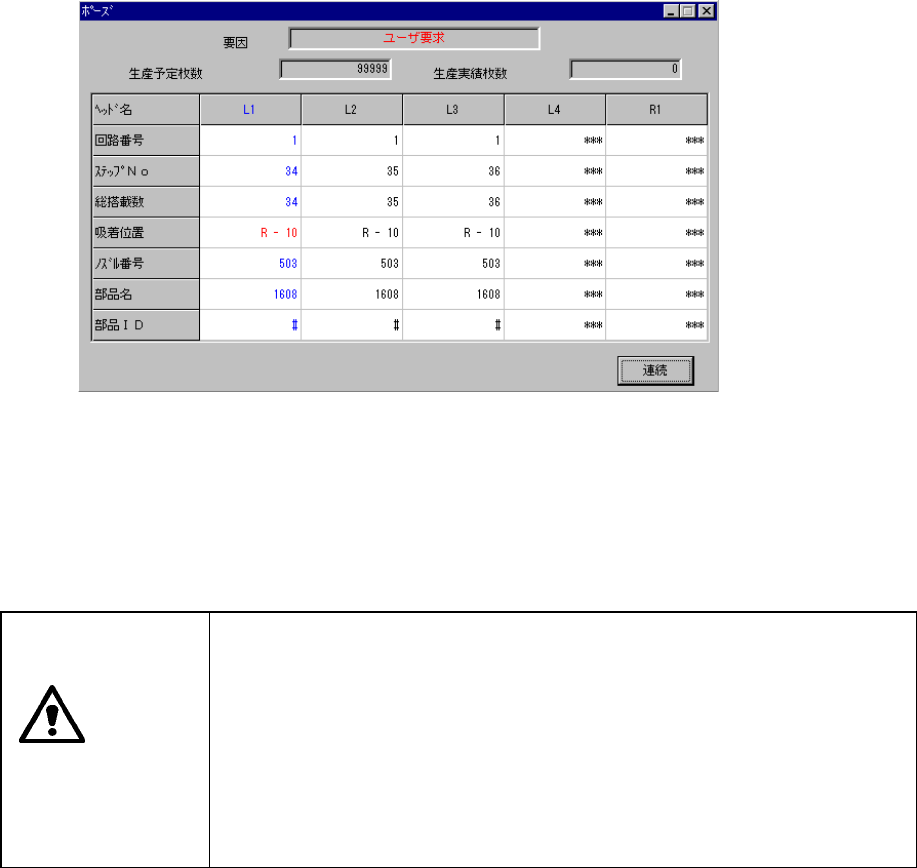
6 - 23 <2> ポーズ 生産を一時停止する場合は,オペレーションパネルの< STOP >スイッチを押します。 実行モードが “連続” の場合 , 生産実行時 に< ST O P > スイッチが押 された場合, 又は実行モー ド がステップの場合で,ステップ位置で停止した場合,マシンはポーズ状態になります。 ポーズ状態時のダイアログ画面を図 6-2-2-3 に示します。 図 図 図 図 6-2-2-3 ポーズ…
6 - 22
① 生産実績/予定枚数
予定枚数:生産条件で設定した生産予定枚数。
生産実績:生産枚数の実績を表示します。
第11 章 操作オプション(図11−4−2)の“生産(表示)”タグの“生産基板枚数を
積算する。”の項がチェックされている時は,生産基板枚数の実績数からカウントを始め
ます。操作オプション“生産(表示)”タグの“生産基板枚数をカウントダウンする”の
項がチェックされている時は,生産実績枚数は残りの枚数となります。
② 生産モード
現在実行中の生産モード(同時・順次・混合)を表示します。(
((
(KE-2030 のみ)
のみ)のみ)
のみ)
③ 回路番号
ヘッドが吸着搭載する部品の回路番号を示します。
④ ステップNO
ヘッドが吸着搭載する部品の“搭載データ”で作成した時の番号を表示します。
⑤ 総搭載数
基板1枚に対しての搭載点数を表示します。(最大値は 搭載点数 × 回路数)
⑥ 吸着位置
ヘッドが吸着するフィーダ番号を表示します。
MTC部品の場合、MTC自身が部品切れ時の段検索を行っている為表示する段が異なる場合
があります。
⑦ ノズル番号
ヘッドの装着しているノズル番号を表示します。
⑧ 部品名
ヘッドが吸着している部品名を表示します。
⑨ 部品ID
ヘッドが吸着搭載する部品の部品IDを表示します
⑩ シーケンス
現在実行中の搭載シーケンスを表示します。
⑪ 生産状態
現在の生産状態を表示します。表示する内容は以下の通りです。
表示文字
表示文字表示文字
表示文字
状態
状態状態
状態
基板搬送中
基板搬送中
ICマーク認識中
ICマークの認識処理中
BOCマーク認識中
BOCマーク認識中
バッドマーク検出中
バッドマーク検出中
搭載位置
部品の搭載中又は,搭載位置までの移動中
吸着位置
部品の吸着中又は,吸着位置までの移動中
コプラ認識中
コプラ認識中
ノズル装着中
ノズル装着中又は,ノズル装着位置までの移動中
ノズル返却中
ノズル返却中又は,ノズル返却位置までの移動
部品廃棄中
部品廃棄中又は,部品廃棄位置までの移動
バンクマーク読取中
バンクマーク読取中
その他の位置
その他動作中
⑫ 総搭載点数
基板1枚あたりの全搭載点数
注意:
注意:注意:
注意:
6 - 23
<2> ポーズ
生産を一時停止する場合は,オペレーションパネルの<STOP>スイッチを押します。
実行モードが“連続”の場合,生産実行時に<STOP>スイッチが押された場合,又は実行モード
がステップの場合で,ステップ位置で停止した場合,マシンはポーズ状態になります。
ポーズ状態時のダイアログ画面を図 6-2-2-3 に示します。
図
図図
図 6-2-2-3
ポーズ状態時の表示
ここで<START>スイッチを押すとポーズダイアログ表示が消え,ポーズ状態が解除されます。
<STOP>スイッチが押された場合は,生産中断処理に移行します。
注意
<START>スイッチを押すと直ちにヘッドが移動し,生産が開始します。
人身への損傷を防ぐ為,動作中は装置内部に手を入れたり,顔や頭を近づけ
ないで下さい。
<START>スイッチを押す前に,装置内部の作業をしている人がいないこと
を確認して下さい。
<START>スイッチを押す前に,装置付近にいて,人身の障害になるような
人がいないことを確認して下さい。
<START>スイッチを押す前に,装置内部の各動作を妨げるもの(調整工具
など)がとりつけられていたり,置かれたりしていない事を確認して下さい。
6 - 24
ポーズ状態の時,ティーチングにより,吸着位置,搭載位置,バキューム圧が変更できます。
生産条件の実行モードの項で「ステップ」がチェックされていると,オペレーションパネルの
<START>スイッチを押して生産動作を開始した時も生産状態ダイアログは表示せず,図 6-2-2-3
のダイアログを表示します。
ステップ生産中で停止している時又は,連続生産中でポーズしている時には,キーボードのF8
キーを押す事で実行モードを連続/ステップトグルに切り替える事ができます。ダイアログにある
連続/ステップボタンを押下することによっても実行モードは切り替わります。
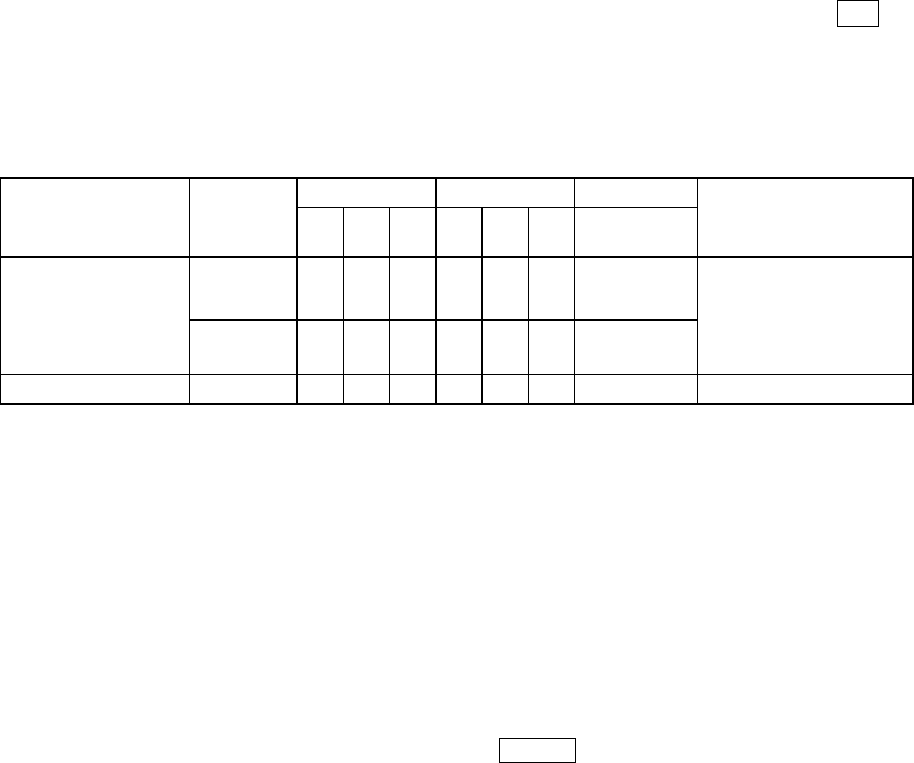
生産動作中にポーズした時は,ポーズ要因とポーズの位置によって次のデータがティーチングでき
ます。
吸着データ
搭載データ
マークデータ
ポーズ要因
ポーズ
位置
X,Y
Z
Va
c
X,Y
Z
Va
c
X,Y
備考
吸着位置
○
○
○
キーによるユーザ要求
カバーオープン
フィーダバンク下降
フィーダ浮き検出
搭載位置
○
○
・
XYティーチングから
開始
・
有効なHODデバイス
キーは
CAMERA
キー,
HEAD
キー
マーク認識エラー
マーク位置
○
・
CAMERA
キーのみ有効
1. 吸着位置のティーチングは,入力順搭載で順次吸着の時のみ可能です。
2. 搭載位置のティーチングは基準回路搭載中のみ可能で,基準回路でバッドマークが検出され
た基板ではすることができません。
3. 吸着位置でのバキューム圧のティーチングは,次の手順に手動でHODを操作して行います。
Zを下げて部品を吸着 → バキューム圧ティーチング → 部品廃棄。
4. 搭載位置でのバキューム圧ティーチングはそのまま行い,バキュームのON/OFFはでき
ません。
5. バキューム圧のティーチングは,現在ティーチングしている搭載データ又は,吸着データか
ら参照している部品データに反映されます。
6. ティーチングで取込まれるデータは,HODの ENTER キーを押す直前にHODのLEDが
点灯していたティーチング項目だけでXY,Z,Vacすべてをティーチングで取得したい
場合は,別々にティーチングして取得しなければなりません。
7. トレイ部品の吸着位置ティーチングはできません。