KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第297页
4 - 193 また吸着高さ追尾を行う場合は、プログラム編集メニュー「マシン操作」メニューの「吸着高 さ」を選択すると以下の実行条件ダイアログが表示されます。 図 図 図 図 4-12-4-4-2 吸着高さカメラ追尾ダイアログ 吸着高さカメラ追尾ダイアログ 吸着高さカメラ追尾ダイアログ 吸着高さカメラ追尾ダイアログ 1) 送り方法 ① 自動送り ある一定の間隔で, 次々と吸着 位置をカメラまた はHMSで捕らえて いきます。 以 下…
4 - 192
4-12-4-4.
吸着位置カメラ追尾/吸着高さ追尾
吸着位置カメラ追尾/吸着高さ追尾吸着位置カメラ追尾/吸着高さ追尾
吸着位置カメラ追尾/吸着高さ追尾
カメラにより吸着位置を追尾します。モニタに表示される位置を目視することにより,入力座標が
不良であればHODを操作してティーチングによる修正が行えます。
またHMSを使うことにより吸着高さを追尾することができます。この場合,モニターにHMSか
らの検出値を逐次表示していきます。高さが著しく異なる場合,座標ティーチングと同様,高さの
値をティーチングできます。(生産時の追尾は第6章生産手順を参照して下さい)
吸着位置(高さ)追尾の流れ
マシン操作メニュー
吸着位置/吸着高さ
吸着追尾
の条件設定
吸着位置(高さ)追
尾の実行
モニターにて座標
/HMS検出値を目視
HODによるティー
チング
各座標の修正を反映
各座標の修正
選択
各吸着データ座標へ移動
実行
(1)
条件設定
条件設定条件設定
条件設定
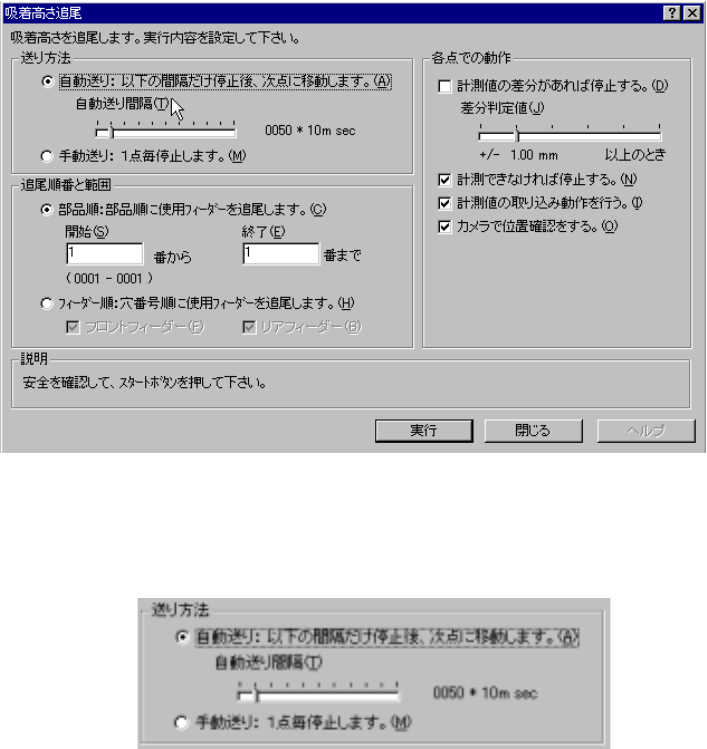
吸着座標追尾を行う場合はプログラム編集メニュー「マシン操作」メニューの「吸着位置」を
選択すると以下の実行条件ダイアログが表示されます。
図
図図
図
4-12-4-4-1
吸着座標位置カメラ追尾ダイアログ
吸着座標位置カメラ追尾ダイアログ吸着座標位置カメラ追尾ダイアログ
吸着座標位置カメラ追尾ダイアログ
4 - 193
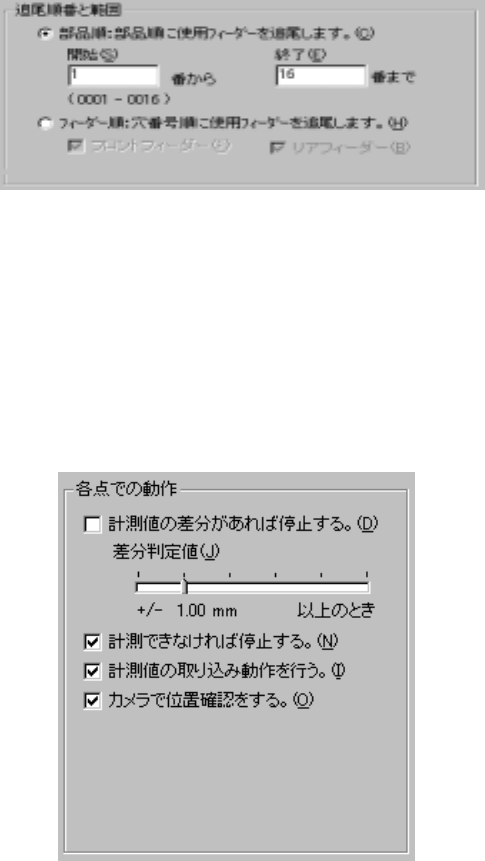
また吸着高さ追尾を行う場合は、プログラム編集メニュー「マシン操作」メニューの「吸着高
さ」を選択すると以下の実行条件ダイアログが表示されます。
図
図図
図 4-12-4-4-2
吸着高さカメラ追尾ダイアログ
吸着高さカメラ追尾ダイアログ吸着高さカメラ追尾ダイアログ
吸着高さカメラ追尾ダイアログ
1) 送り方法
① 自動送り
ある一定の間隔で,次々と吸着位置をカメラまたはHMSで捕らえていきます。以
下の「自動送り間隔」で設定した時間だけ停止し,時間経過後に次点に移動します。
(自動送り間隔)
スライダーバーにて,停止間隔を調整します。
② 手動送り
ユーザーが操作するまで,次点への移動は,ずっと停止します。
4 - 194
2) 追尾順番と範囲
① 部品順
部品データの何番目から何番目までを範囲として追尾するかを入力します。
デフォルトでは全部品を実行します。
② フィーダ順
フィーダバンクのフロント/リアを順番に追尾します。
追尾するフィーダバンクを選択しください。
3) 各点での動作(吸着高さ追尾)
吸着高さ追尾では各追尾点移動後に行う動作を設定することができます。
① 計測値との差分があれば呈しする。
HMSで計測した検出値と、吸着データで設定されている吸着高さ値が、差分判定値で
設定した範囲を超えていた場合にダイアログを出して停止させます。
(差分判定値)
+−での上限/下限範囲をスライダーバーで設定します。
② 計測できなければ停止する。
HMSで計測計測できない場合、(計測した吸着点に部品がない場合など)にダイアロ
グを堕して停止させます。
③ 計測値の取り込み動作を行う。
HMSで計測できた値を、各点毎問い合わせながら吸着データに取り込むことができま
す。
④ カメラで位置確認をする。
HMSで吸着点で移動する前に、VCSモニターで吸着点を確認することができます。
追尾条件の設定をすべて行い,準備ができたら<スタート>ボタンまたは<実行>を押
します。
また,<閉じる>を押すと元の画面にり戻ます。