KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第289页
4 - 185 4-12-4-2. マーク系−フィーダバンク(フロント/リア) マーク系−フィーダバンク(フロント/リア) マーク系−フィーダバンク(フロント/リア) マーク系−フィーダバンク(フロント/リア) フィーダバンクマークを認識し認識座標の実測値を格納します。この実測値は吸 着データティーチ ング時の座標補正に反映されます。 フロントフィーダバンクのマークを認識する場合は,「フロント」を,リアフィ ーダバンクのマー クを認…
4 - 184
(1)
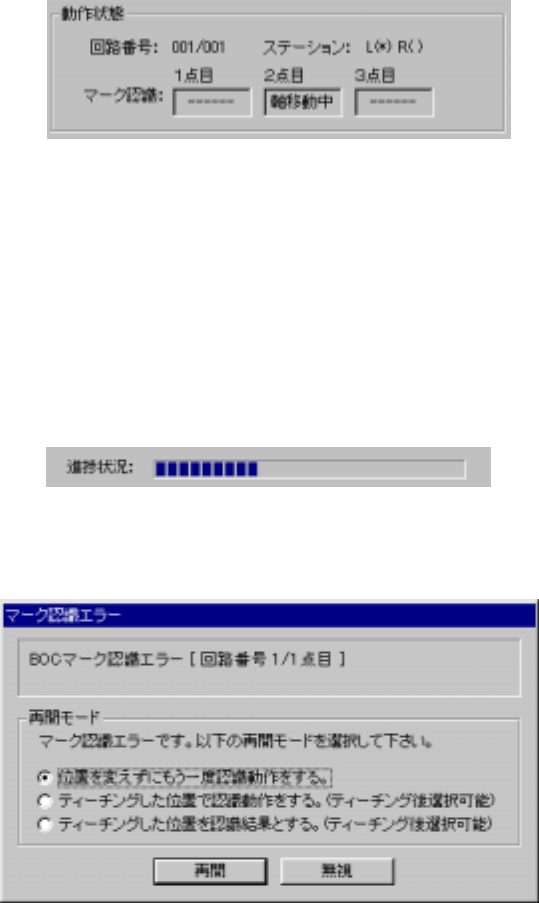
動作状態
動作状態動作状態
動作状態
①
回路番号
認識実行中の回路番号が表示されます。「現在の回路番号/回路総数」を意味します。
(通常は基準回路のBOCのみ認識します)
②
ステーション(
KE2030
のみ)
認識実行中のステーションが表示されます。
(2)
進捗状況
進捗状況進捗状況
進捗状況
進捗の割合がプログレスバーで表示されます。
実行時にBOCマーク認識に失敗した場合は以下のダイアログが表示されます。
図
図図
図
4-12-4-1-3
BOCマーク認識エラー
BOCマーク認識エラーBOCマーク認識エラー
BOCマーク認識エラー
認識を再開する場合は以下の再開モードを選択します。
①
位置を変えずにもう一度認識動作をする。
現在の
OCC
カメラのある位置を変えずに、もう一度マーク認識を実行します。
②
ティーチングした位置で認識動作をする。
HOD
の
CAMERA
ボタンで座標ティーチングを行った位置にて、もう一度マーク認識
を実行します。
この項目はティーチング確定後選択が可能となります。
③
ティーチングした位置を認識結果とする。
HOD
の
CAMERA
ボタンで座標ティーチングを行った位置を
BOC
認識時のマーク中
心の実測値として確定します。この項目はティーチング確定後選択が可能となります。
◇
上記選択後、認識を再開する場合は「再開」ボタンを押してください。
「無視」ボタンを押した場合は、その後は回路毎/基板毎単位でBOC認識は実行されま
せん。
4 - 185
4-12-4-2. マーク系−フィーダバンク(フロント/リア)
マーク系−フィーダバンク(フロント/リア)マーク系−フィーダバンク(フロント/リア)
マーク系−フィーダバンク(フロント/リア)
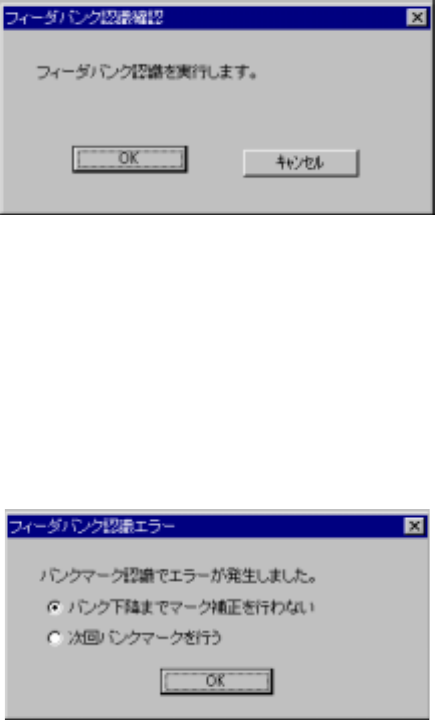
フィーダバンクマークを認識し認識座標の実測値を格納します。この実測値は吸着データティーチ
ング時の座標補正に反映されます。
フロントフィーダバンクのマークを認識する場合は,「フロント」を,リアフィーダバンクのマー
クを認識する場合は「リア」を選択してください。
(
KE2030
では一度のメニュー選択で左−右ステーションの2回が実行されます。)
図
図図
図
4-12-4-2-1
フィーダバンク認識確認ダイアログ
フィーダバンク認識確認ダイアログフィーダバンク認識確認ダイアログ
フィーダバンク認識確認ダイアログ
実行時にバンクマーク認識に失敗した場合は以下のダイアログが表示されます。この場合,認識結
果は格納されません。マーク認識を以後どのタイミングで行うかを選択して下さい。
(1)
バンク下降までマーク補正を行わない
(2)
次回バンクマーク認識を行う
図
図図
図
4-12-4-2-2
バンクマーク認識エラーダイアログ
バンクマーク認識エラーダイアログバンクマーク認識エラーダイアログ
バンクマーク認識エラーダイアログ
4 - 186
4-12-4-3. 搭載位置カメラ追尾
搭載位置カメラ追尾搭載位置カメラ追尾
搭載位置カメラ追尾
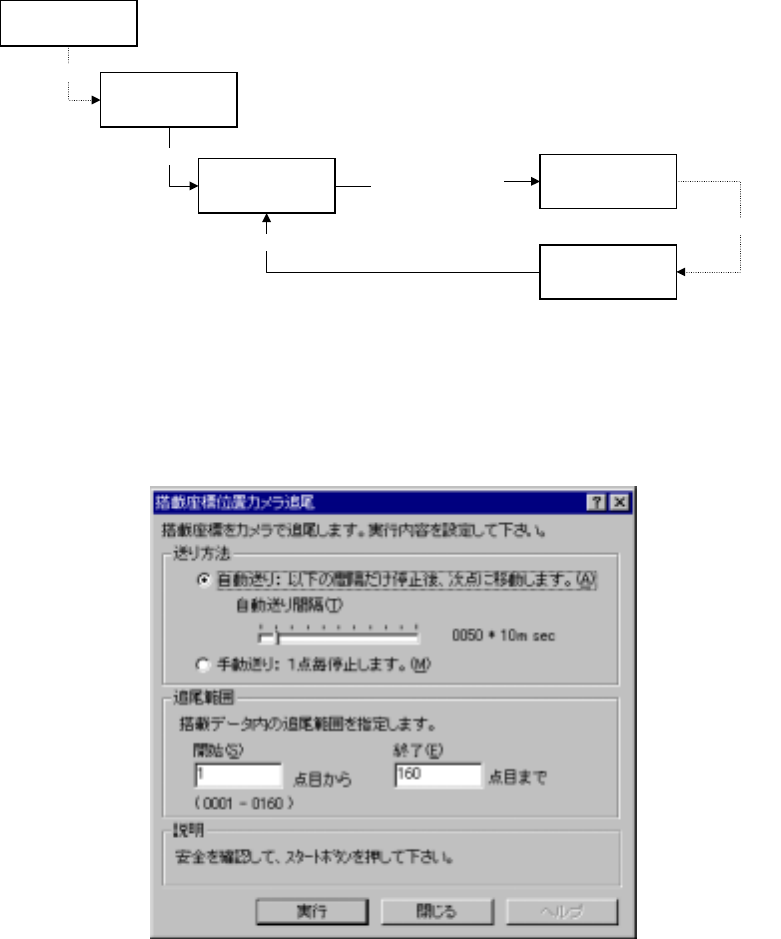
カメラにより搭載位置を追尾します。モニタに表示される搭載位置を目視することにより,入力座
標が不良であればHODを操作してティーチングによる修正が行えます。(生産時の追尾は第6章
生産手順を参照して下さい)
搭載位置追尾の流れ
マシン操作メニュー
搭載位置
搭載位置カメラ追尾
の条件設定
搭載位置カメラ追尾
実行
モニターにて座標を
目視
HODによるティー
チング
各座標の修正を反映
各座標の修正
選択
各搭載データ座標へ移動
実行
(1)
条件設定
条件設定条件設定
条件設定
プログラム編集メニュー「マシン操作」メニューの「搭載位置」を選択すると以下の実行条件
ダイアログが表示されます。
図
図図
図
4-12-4-3-1
搭載座標位置カメラ追尾ダイアログ
搭載座標位置カメラ追尾ダイアログ搭載座標位置カメラ追尾ダイアログ
搭載座標位置カメラ追尾ダイアログ