KE2010取扱説明書Ver.2.01和文Rev.08.pdf - 第433页
6 – 98 ② 搭載位置の変更 停止状態であれば, HODの CAMERA キーを押すこ とにより搭載位 置のティー チングが出来 ます。 また,直接テンキーから搭載位置を変更することも出来ます。 手入力からでも, 修正値を 入力することが 出来ます。 入力可能範囲は , ソ フトウェア範囲 まで です。入力後,設定ボタンを押した時点でヘッドが移動しますので注意して下さい。 注意 人身への損害を 防ぐため ,HOD 操作中…
6 – 97
6-5-3.
カメラ追尾
カメラ追尾カメラ追尾
カメラ追尾
(1)
自動送り
搭載カメラ追尾で,自動送りが選択されていれば,試打実行後カメラが試打搭載点へ移動し,
モニタに搭載した状態を映します。
自動送り間隔で指定された時間その位置へ停止後,自動的に次の搭載点へ移動します。
部品データで部品寸法の縦/横どちらかが
5.00 mm
よりも長い部品は,部品の四隅に移動し
ます。
注意
試打完了後,続けてカメラ追尾が行われます。人身への損傷を防ぐ為,動作中
は装置内部に手を入れたり,顔や頭を近づけないで下さい。
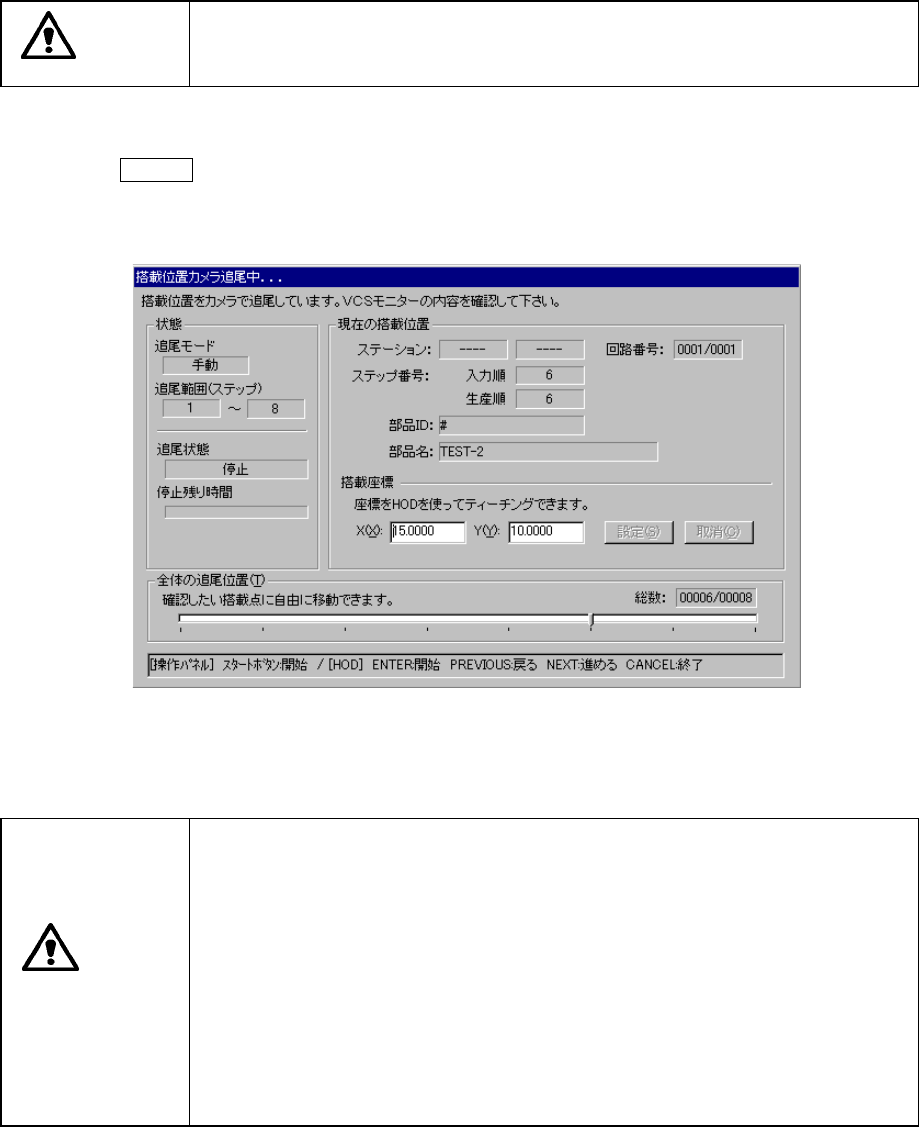
①
一時停止させたい場合
HODの
PAUSE
キーを押すと,カメラが移動中であれば次の搭載点で,ポーズ中であればそ
の位置で停止状態になる。
この時画面の表示は図
6-5-3-1
のようになります。
図
図図
図
6-5-3-1
搭載位置追尾ダイアログ
搭載位置追尾ダイアログ搭載位置追尾ダイアログ
搭載位置追尾ダイアログ
停止状態の解除は,
<START>
スイッチで再開,
<STOP>
スイッチで中断となります。中断
の場合は,確認ダイアログが表示されます。
注意
<START>
スイッチを押すと直ちにヘッドが移動し,試打が開始します。
人身への損傷を防ぐ為,動作中は装置内部に手を入れたり,顔や頭を近づけない
で下さい。
<START>
スイッチを押す前に,装置内部の作業をしている人がいないことを確
認して下さい。
<START>
スイッチを押す前に,装置付近にいて,人身の障害になるような人が
いないことを確認して下さい。
<START>
スイッチを押す前に,装置内部の各動作を妨げるもの(調整工具など)
がとりつけられていたり,置かれたりしていない事を確認して下さい。
また,
<STOP>
スイッチを選択し,追尾を中断しても,ノズル交換動作を実行す
る為,XY軸,ヘッドとも動作は継続します。
追尾を中断した場合でも人身への損傷を防ぐ為,動作中は装置内部に手を入れ
たり,顔や頭を近づけないで下さい。
6 – 98
②
搭載位置の変更
停止状態であれば,HODの
CAMERA
キーを押すことにより搭載位置のティーチングが出来
ます。
また,直接テンキーから搭載位置を変更することも出来ます。
手入力からでも,修正値を入力することが出来ます。入力可能範囲は,ソフトウェア範囲まで
です。入力後,設定ボタンを押した時点でヘッドが移動しますので注意して下さい。
注意
人身への損害を防ぐため,HOD操作中は装置内部に手を入れたり,顔や頭を
近づけないで下さい。X,Yの値を
入力後,カーソルを移動した時点で入力値のX,Yの位置にヘッドが移動しま
すので注意して下さい。
③
前搭載位置へ戻る
停止状態であれば,HODの
PREVIOUS
キーを押すことにより前搭載位置へ戻ることが出来
ます。
前搭載位置へ戻った後も停止状態は,保持されます。
注意
PREVIOUS
キーを押すと直ちにヘッドが移動します。
人身への損害を防ぐ為,HOD操作中は装置内部に手を入れたり,顔や頭を近
づけないで下さい。
PREVIOUS
キーを押す前に,装置内部の作業をしている人がいないことを確
認して下さい。
PREVIOUS
キーを押す前に,装置付近にいて,人身の障害になるような人が
いないことを確認して下さい。
PREVIOUS
キーを押す前に,装置内部の各動作を妨げるもの(調整工具など)
が取付けられていたり,置かれたりしていないことを確認して下さい。。
④
次搭載位置へ進む
ポーズ状態であれば,HODの
NEXT
キーを押下することにより次搭載位置へ進ことが出来
ます。
次搭載位置へ進んだ後も停止状態は,保持されます。
注意
NEXT
キーを押すと直ちにヘッドが移動します。
人身への損傷を防ぐ為,動作中は装置内部に手を入れたり,顔や頭を近づけな
いで下さい。
NEXT
キーを押す前に,装置内部の作業をしている人がいないこ
とを確認して下さい。
(2)
手動送り
搭載カメラ追尾で,手動送りが選択されていれば,試打実行後カメラが第一試打搭載点へ移動
し,モニタに搭載した状態を映し停止状態となります。
注意
試打完了後,続けて第一試打搭載点へ移動します。人身への損傷を防ぐ為,動
作中は装置内部に手を入れたり,顔や頭を近づけないで下さい。
6 – 99
6-5-4.
吸着追尾
吸着追尾吸着追尾
吸着追尾
(1)
自動送り
吸着カメラ追尾で,自動送りが選択されていれば,試打実行前カメラが吸着位置へ移動し,モ
ニタに吸着する状態を映します。
自動送りで,間隔で指定された時間その位置へポーズ後,自動的に次の吸着点へ移動します。
注意
フィーダバンク認識を一度も行っていない場合に(原点復帰又は,バンクが下
降し上昇させた後から),
吸着位置移動前にフィーダバンク認識を自動的に行う場合があります。フィー
ダバンク認識実行時は,ヘッドが供給装置の上を横切りますので,手や顔など
を装置内に入れたり近づけないで下さい。
特にティーチング,吸着追尾等のメニュー以外からの認識実行時の動作には気
をつけて下さい。
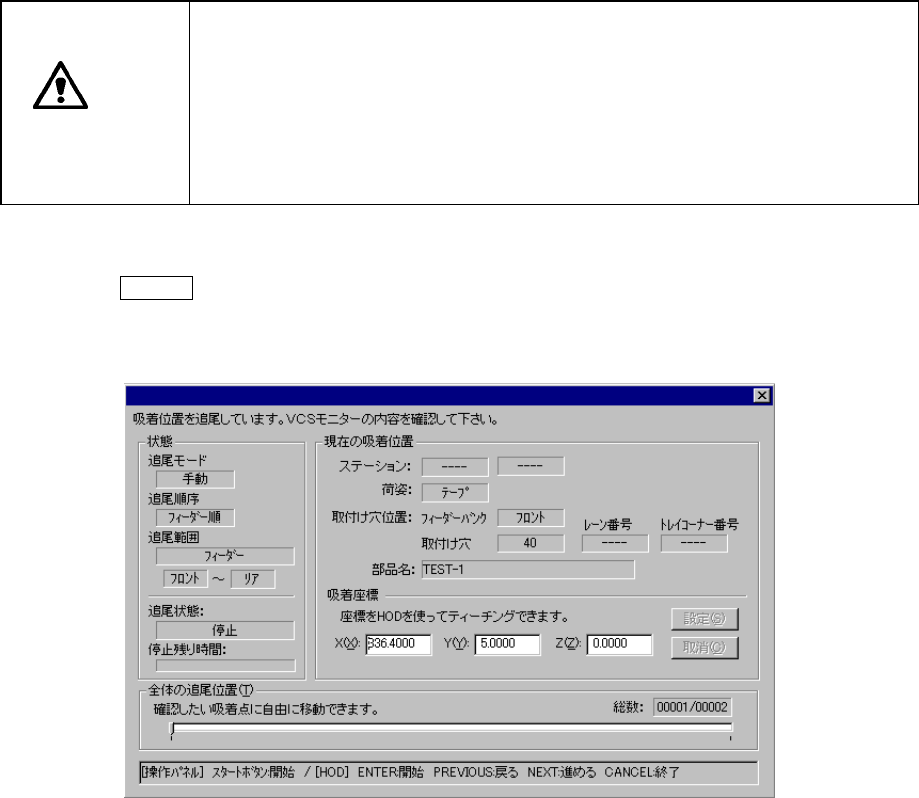
①
一時停止させたい場合
HODの
PAUSE
キーを押すと,カメラが移動中であれば次の吸着点で,ポーズ中であればそ
の位置で停止状態になります。
この時,画面の表示は図
6-5-4-1
のようになります。
図
図図
図
6-5-4-1
吸着追尾ポーズ中ダイアログ
吸着追尾ポーズ中ダイアログ吸着追尾ポーズ中ダイアログ
吸着追尾ポーズ中ダイアログ
停止状態の解除は,
<START>
スイッチで即座に再開,
<STOP>
スイッチで中断となります。中
断の場合は,確認ダイアログが表示されます。