天龙M10 M20_中文手册.pdf - 第256页
5.资料库的制作与编辑 5-92 ● MX-20(MX-ST2,MXR) 在 MX-RT1 以外的矩阵盘送料器的情况下,将碰到定位销的矩阵盘的近前右角作为 XY 基准点(前 位置和后位置都有基准点),将送料盘上面作为 Z 基准点进行登录。 在这一位置之外设置矩阵盘时,将以 MX-20 的前位置为例,对基准点登录的步骤进行说明。 前位 置的 基准 点( 0 , 0 ) 后 位 置的基 准 点(0,0) 【操作】 ① 选择“功能>检测…
5.资料库的制作与编辑
5-91
供给速度 在每个送料盘资料库中,可以对送料盘拉出/收起时的速度(中继组件的
轴速度及搬送组件的轴速度)进行设定。按照最高速度 1000,以 0.1%
为单位进行设定。在设定值为「0」的情况下,则“手动>送料盘资料”
的搬送速度值为有效。
送料盘序号 对链接的送料盘序号的链接顺序进行指定。
在无链接的情况下
送料盘序号 2 以后为 0:无链接。
在 MX-20,MXR(L),MXR(R)的情况下
1~20:送料盘序号
在 MX-ST2 和 MX-RT1 的情况下
全部为“1”。
另外,如果双击右侧窗口的「送料盘序号」,就会按照该序号进行送料
盘的出入动作。(0 为返回)
X/Y 偏差值 偏差值就是偏离基准点的值。关于基准点,可以参照以下各项说明。
■ 矩阵盘送料器的基准点
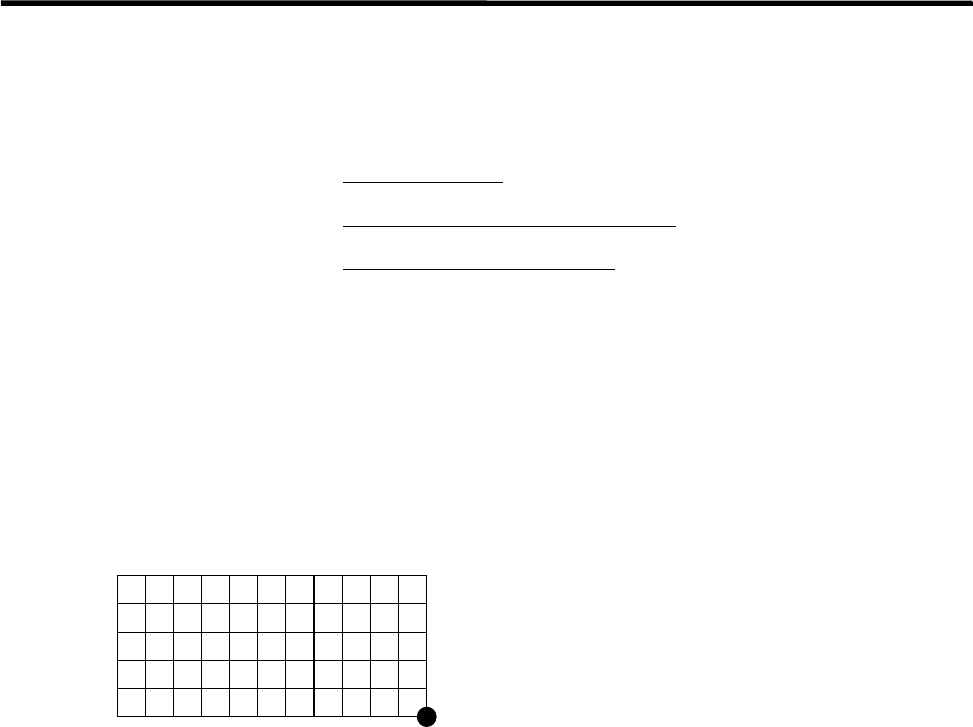
● MX-RT1
在 MX-RT1 设置后,将元件矩阵盘的近前右角作为 XY 基准点,将送料盘上面作为 Z 基准点进行登
录。
XY 基准点
在这一位置之外设置矩阵盘时,基准点的登录步骤如下所示:
【操作】
①
选择“功能>检测”,进入检测模式。
②
点击[检测矩阵盘],在[设备类型]中选择“MX-RT1”。
③
通过基板相机对 XY 新的基准点进行检测。
④
点击<原点变更>按钮。
⑤
确认[X]和[Y]的坐标都将变为“0”。
⑥
在任意贴装头上装上吸嘴,在[轴的指定]中选择[Z 轴],就会对送料盘上面进行检测。
⑦
点击<原点变更>按钮。
⑧
确认[Z]的坐标将变为“0”。
5.资料库的制作与编辑
5-92
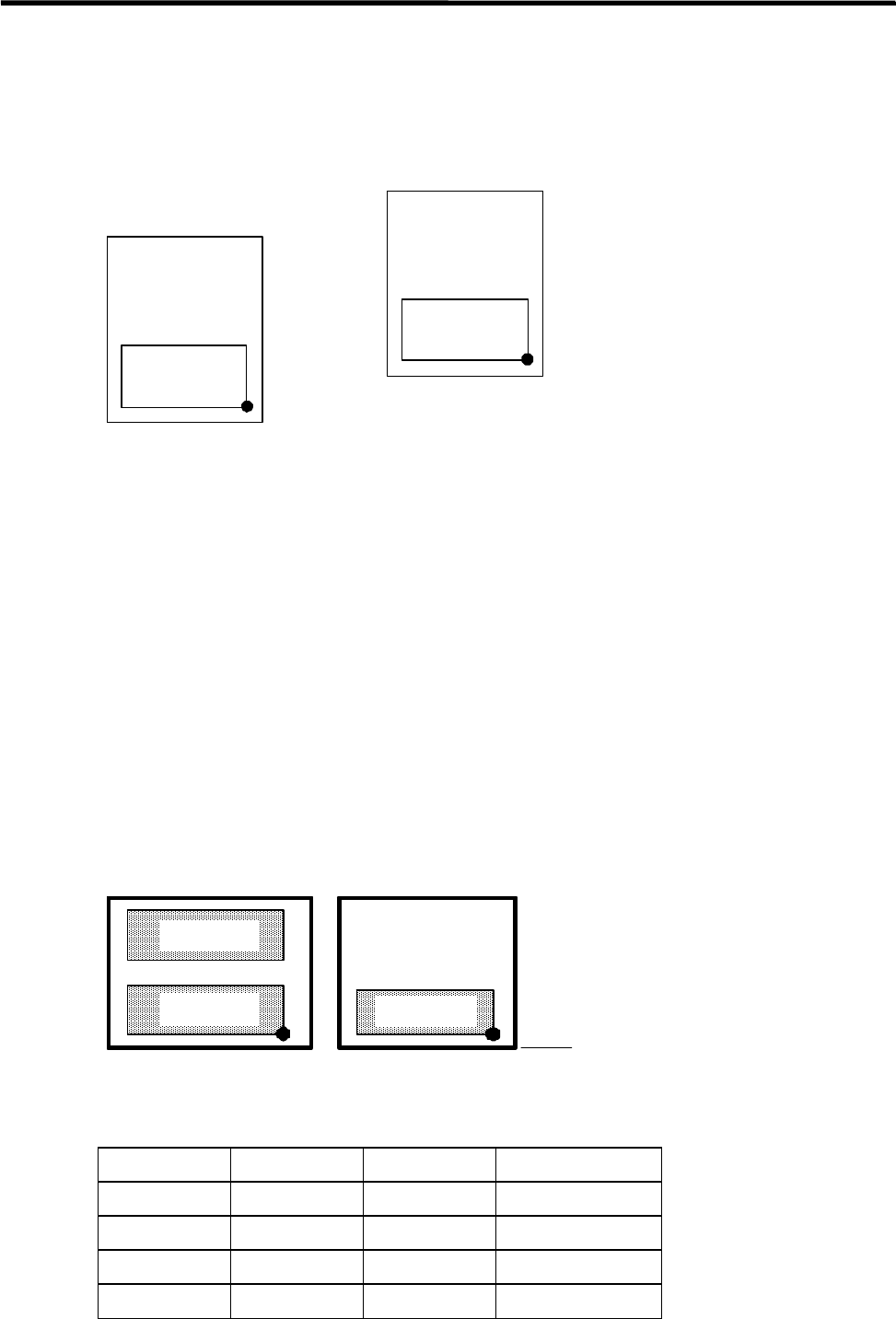
● MX-20(MX-ST2,MXR)
在 MX-RT1 以外的矩阵盘送料器的情况下,将碰到定位销的矩阵盘的近前右角作为 XY 基准点(前
位置和后位置都有基准点),将送料盘上面作为 Z 基准点进行登录。
在这一位置之外设置矩阵盘时,将以 MX-20 的前位置为例,对基准点登录的步骤进行说明。
前位置的基准点(0,0)
后位置的基准点(0,0)
【操作】
①
选择“功能>检测”,进入检测模式。
②
点击[检测矩阵盘],在[设备类型]中选择"MX-20",在[送料盘位置]中选择“前”。
③
通过基板相机对 XY 的基准点进行检测。
④
点击<原点变更>按钮。
⑤
确认[X]和[Y]的坐标都将变为“0”。
⑥
在任意贴装头上装上吸嘴,在[轴的指定]中选择[Z 轴],就可对送料盘上面进行检测。
⑦
点击<原点变更>按钮。
⑧
确认[Z]的坐标将变为“0”。
【注释】 若要对每个各送料盘的基准点都进行设定时,可以在[MX-20/MXR 送料盘情报]栏中对偏差值
进行指定。
无论在哪个矩阵盘送料器的状态下,如果同样的送料盘上使用多个矩阵盘时,就在[X 偏差值]和
[Y 偏差值]的单元格中输入偏离上述基准点的偏差值。
例) 对 MX-20 配置了如下所示的矩阵盘,想要制作链接资料时:
送料盘 4 送料盘 1
前位置
矩阵盘 A
矩阵盘 B
矩阵盘 C
送料盘资料库右侧窗口的输入(实际是横方向进行输入,由于纸面的关系用纵方向进行表示)
送料盘序号 X 偏差值 Y 偏差值 备注
1 0 0 矩阵盘 A
1 0 170 矩阵盘 B
4 0 0 矩阵盘 C
0 0 0 无链接
5.资料库的制作与编辑
5-93
【注释】 在使用 JEDEC 用送料盘的情况下,前侧和后侧定位销的偏差值为 X=0/Y=170。请进行正确的检
测。
不是同一矩阵盘不能进行链接。
【注释】 MX-ST2 和 MX-20 只是在构造上有所不同,基准点的设定方法都相同。在使用 JEDEC 用送料盘的
情况下,前侧和后侧定位销的偏差值为 X=0/Y=180。请进行正确的检测。
【注释】 MX-RT1 和 MX-20 只是在构造上有所不同,基准点的设定方法都相同。在使用 JEDEC 用送料盘的
情况下,前侧矩阵盘和后侧矩阵盘的偏差值约为 Y=140。请进行正确的检测。
矩阵盘资料库(矩阵盘数据)
【菜单】 程序数据>矩阵盘数据
程序数据>吸取数据>供给部/矩阵盘>矩阵盘数据
在使用矩阵盘送料器时,对矩阵盘情报进行登录。在矩阵盘资料库制作之前,必须先制作送料盘
资料库。
【项目】
文件>保存 在资料变更后进行选择,并将变更的内容进行保存。
矩阵盘 对矩阵盘名称进行指定。它与“程序编辑>吸取资料”相链接。
★最大登录数:500 件;最大文字数:半角 14 文字
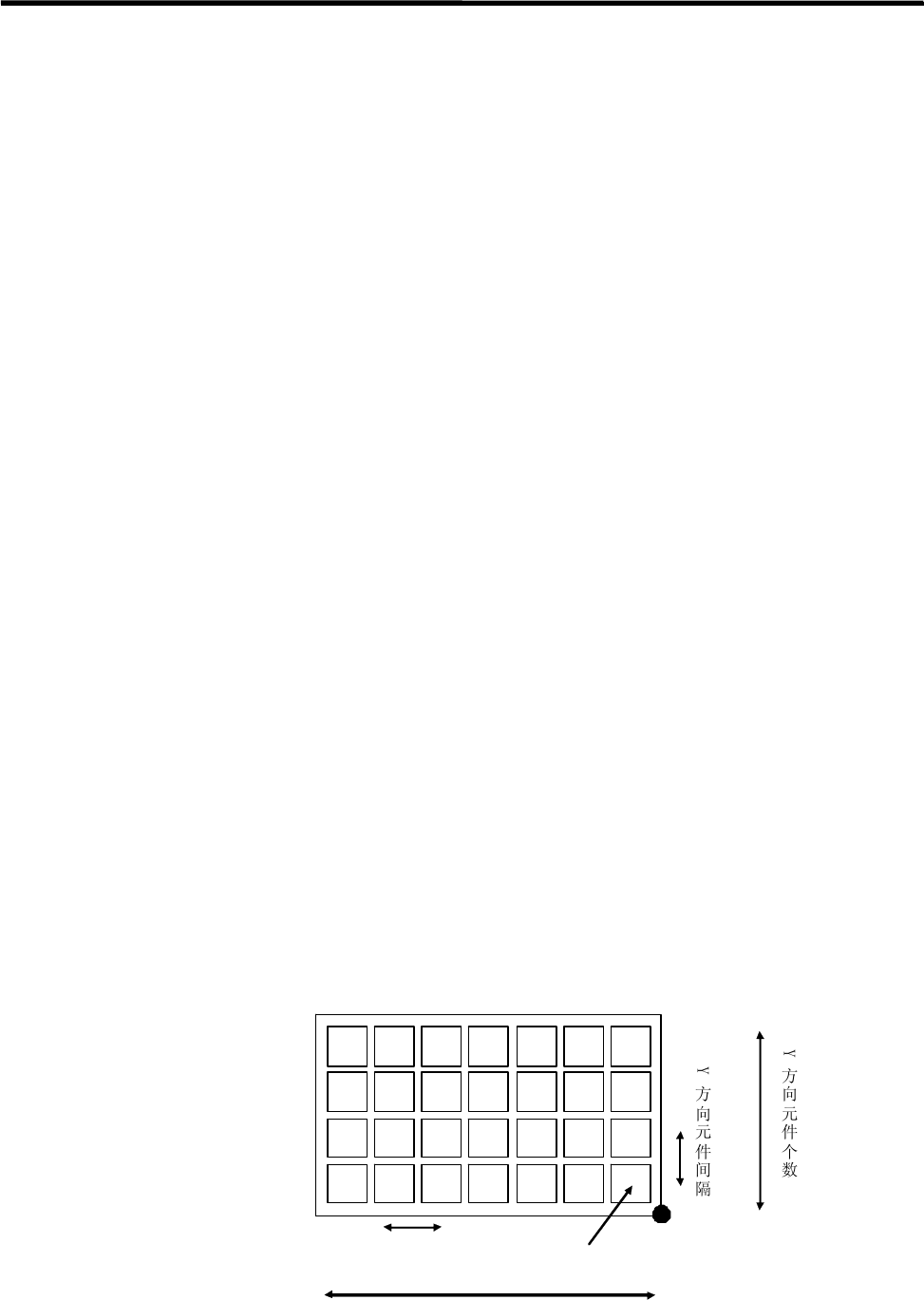
X 方向元件间隔 矩阵盘上元件与元件的间隔(X 方向)
★单位:0.01mm
X 方向元件个数 矩阵盘上元件的个数(X 方向)
★最大个数:999 个
Y 方向元件间隔 矩阵盘上元件与元件的间隔(Y 方向)
★单位:0.01mm
Y 方向元件个数 矩阵盘上元件的个数(Y 方向)
★最大个数:999 个
第 1 吸取点 X 坐标 对最初进行元件吸取的 X 坐标进行指定。
★单位:0.01mm
第 1 吸取点 Y 坐标 对最初进行元件吸取的 Y 坐标进行指定。
★单位:0.01mm
第1吸取点
X 方向元件个数
X 方向元件间隔
原点