天龙M10 M20_中文手册.pdf - 第84页
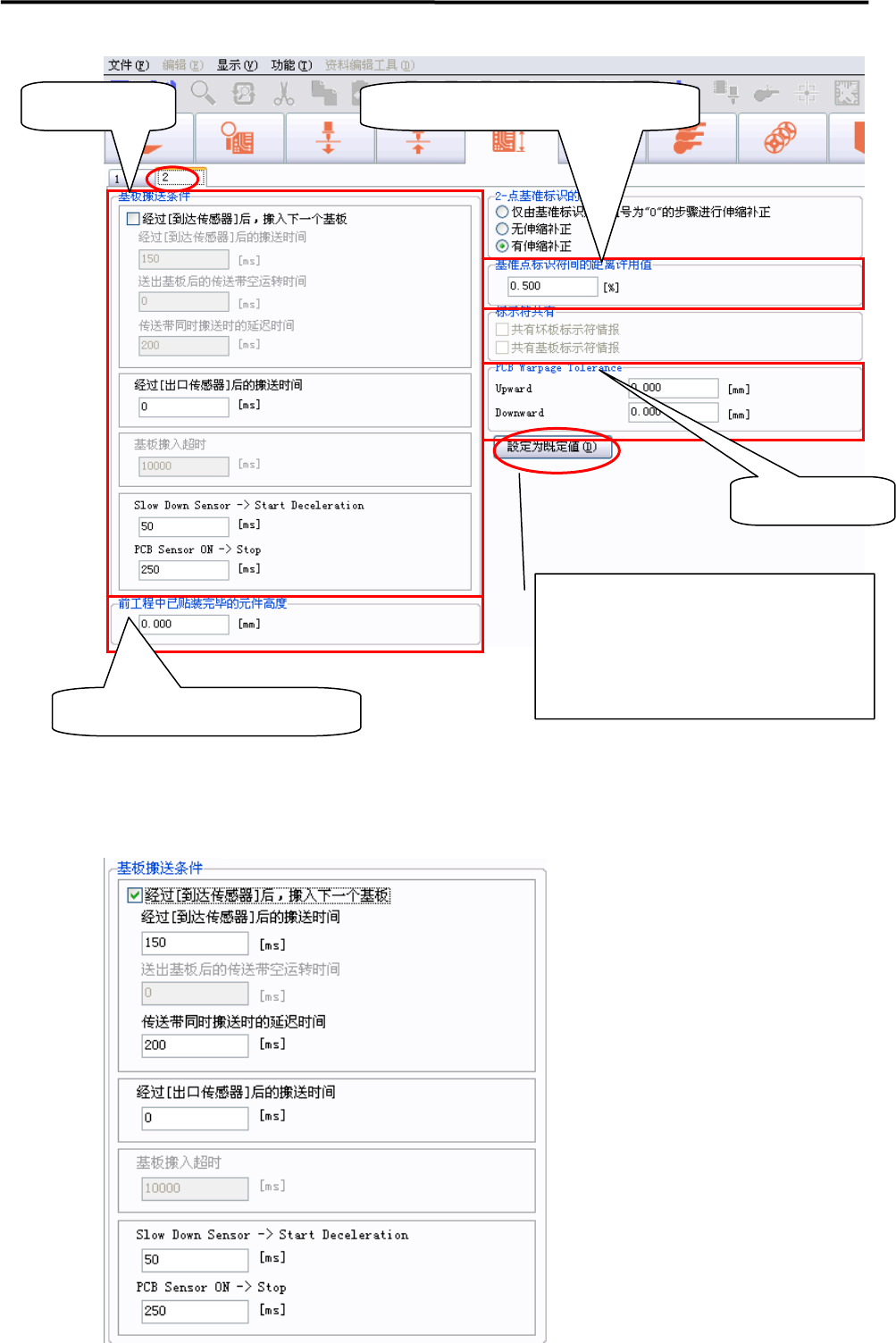
2.程序的制作和编辑 2-26 【菜单】 基板数据>第 2 页 ■ 基板搬送条件 可以对基板的搬入时间及搬出时间进行调整。 基板搬送条件 前工程中已贴装完毕的元件高度 基准点标识符间的距离许用值 基板弯曲容许值 <设定为既定值>按钮 可以将输入的基板数据作为既定值 加以保存。 如果点击该按钮后,在以后重新制作 基板数据时,设定值将会成为默认值。
2.程序的制作和编辑
2-25
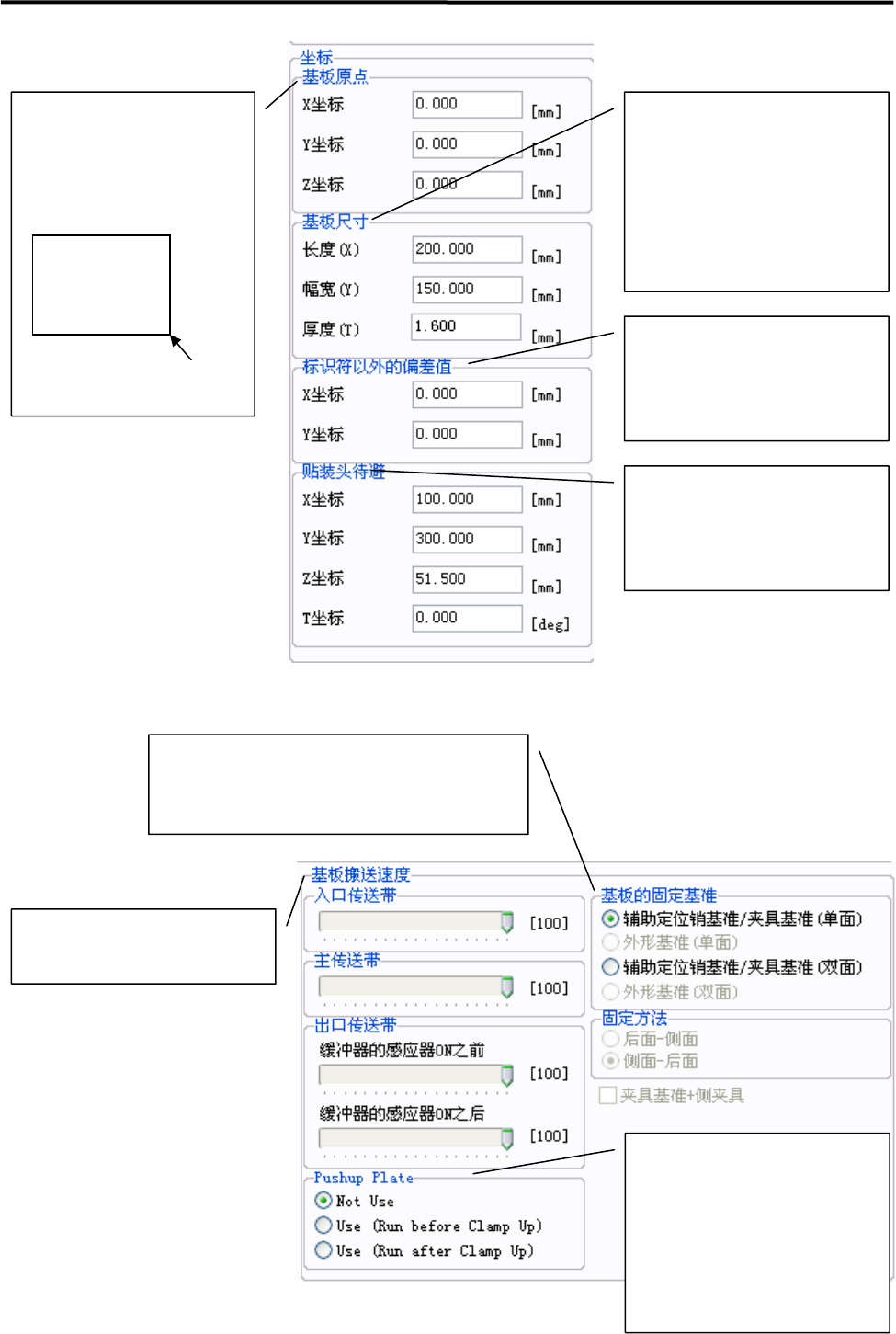
■ 坐标
■ 基板搬送速度
可输入基板尺寸。
长度为 X 方向的尺寸。幅宽为
Y 方向的尺寸。特别是在使用
自动调幅功能时,必须要输入
幅宽。
另外,由于基板上面的高度会
发生变化,因此,请在厚度栏
内输入正确的数值。
在想要修正贴装结果时,
可输入偏差值。
可以对 F 标识符以外的全部
贴装坐标进行偏差值设定。
可以按照每个程序对贴装头
的待避位置进行设定。
除数值输入之外,也可以双击
组合框通过检测来进行坐标
输入。
基板原点的 X/Y 坐标
在基板的右下角,
Z 坐标在基板的上面,
也可以进行变更。
可输入初始值的偏差值。
基板原点
X/Y 坐标
基板
可以对各传送带的搬送速度
进行调整。
可以对推板的使用/未使用
进行设定。
另外,在使用推板的情况下,
可以选择是等待推板的顶起
传感器 ON 之后再进行下一
动作,还是不等待传感器
ON 就直接进行下一动作。
可以对基板的固定方法进行选择。
在单面贴装基板的情况下,请选择[夹具基准
(单面)];在双面贴装基板的情况下,请选
择[夹具基准(双面)]。
2.程序的制作和编辑
2-26
【菜单】 基板数据>第 2 页
■ 基板搬送条件
可以对基板的搬入时间及搬出时间进行调整。
基板搬送条件
前工程中已贴装完毕的元件高度
基准点标识符间的距离许用值
基板弯曲容许值
<设定为既定值>按钮
可以将输入的基板数据作为既定值
加以保存。
如果点击该按钮后,在以后重新制作
基板数据时,设定值将会成为默认值。
2.程序的制作和编辑
2-27
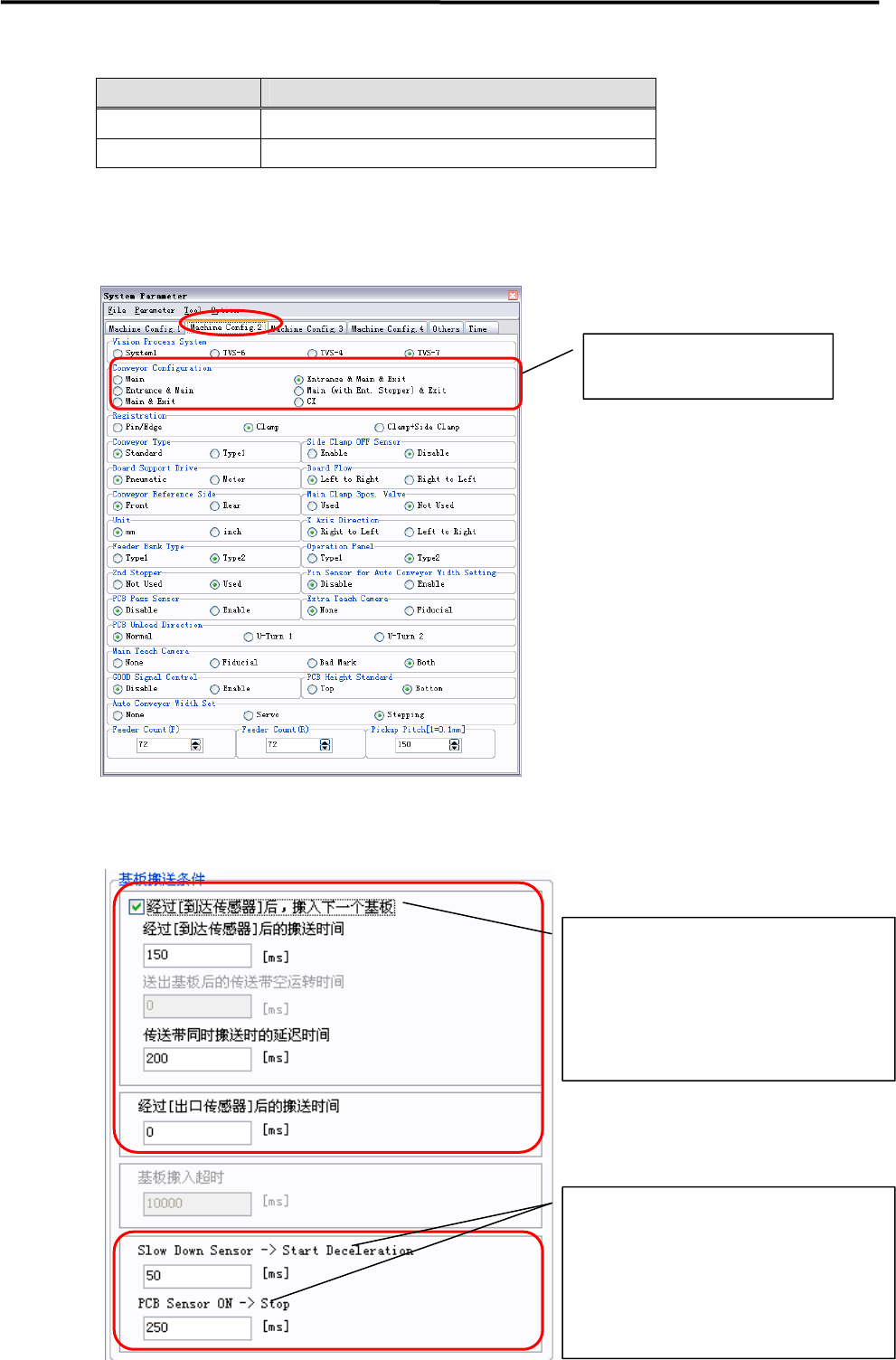
①搬送模式
基板搬送的模式有下列 2 种类型。
搬送模式 基板搬入时间
通常搬送模式 贴装后的基板经过传送带出口传感器之后
放弃型搬送模式 贴装后的基板经过基板到达传感器之后
②传送带构成的确认
【菜单】 系统>系统参数>机械情报 2
可以对传送带的构成进行确认。
③基板搬送条件的设定
可以切换搬送模式。另外,通过对各项目的时间进行设定。可以调整搬送时间。
如果勾选上[经过“到达传感器”后,
搬入下一个基板]的选项时,将会
变为[放弃型搬送模式]。
如果不勾选,则会变为[通常搬送
模式]。
然后,可对各项目的时间进行设定。
在[减速传感器 ON~减速开始]栏,
可以对传送带的减速开始时间进行
调整。
在[到达传感器 ON~停止]栏,
可以对传送带的停止时间进行调整。
当基板未达到止动销时,时间将会
增加。
对传送带的构成进行确认。
(不能进行变更。)