天龙M10 M20_中文手册.pdf - 第331页
10.元件短缺和出错对应方法 10-15 DO 操作 可以对各个机构操作的状态(ON 或者 OFF)进行变更。 “1”表示 ON,“0”表示 OFF。 如果点击画面上的“0”,就会变成“1”;反之,如果点击“1”就会变成“0”。 在与画面显示发生变化的同时,该机构操作也开始运行。 通过这一功能,就可以在错误发生时对机构操作是否正常运行等情况进行确认。 另外通过 DO 操作,使机构操作运行,传感器感知到这一情况后就会将结果显示在 DI 监…
10.元件短缺和出错对应方法
10-14
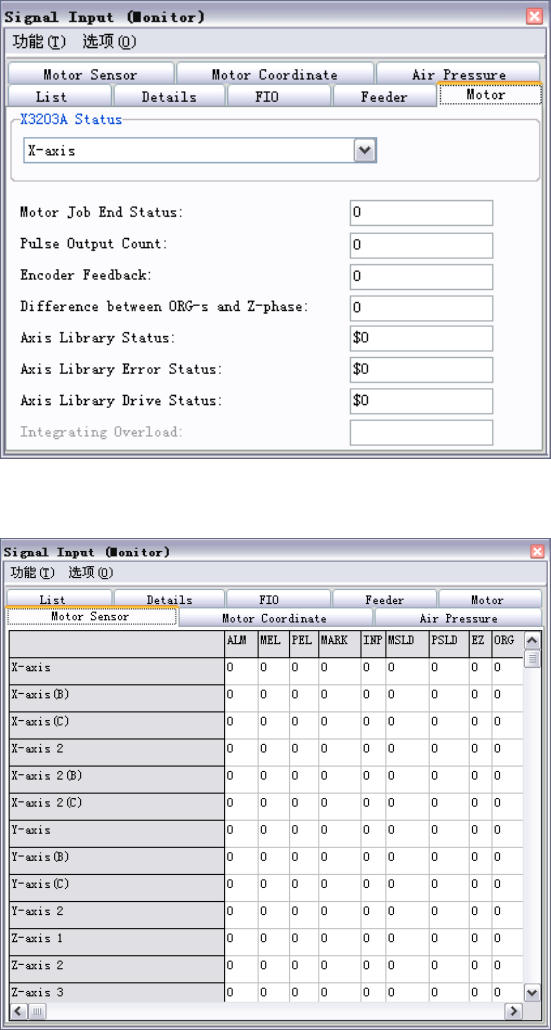
■ 马达
■ 马达传感器
【項目】
ALM: (Alarm) 报警
MEL: (Minus End Limit) 负极限
PEL: (Plus End Limit) 正极限
MARK: (Mark) 标记
INP: (In Position) 在位
MSLD: (Minus Slow Down) 负慢降
PSLD: (Plus Slow Down) 正慢降
EZ: 0相
ORG: (Origin) 原点
10.元件短缺和出错对应方法
10-15
DO 操作
可以对各个机构操作的状态(ON 或者 OFF)进行变更。
“1”表示 ON,“0”表示 OFF。
如果点击画面上的“0”,就会变成“1”;反之,如果点击“1”就会变成“0”。
在与画面显示发生变化的同时,该机构操作也开始运行。
通过这一功能,就可以在错误发生时对机构操作是否正常运行等情况进行确认。
另外通过 DO 操作,使机构操作运行,传感器感知到这一情况后就会将结果显示在 DI 监视器上。
对于用地址编号和位码(0 到 7 之间的数字)组合而成的各机构操作的名称,通过数字输出(详细)
面板就可以进行确认。
警告
如果实施 DO 操作,指定的机构操作就会运行。
在实施 DO 操作时,请不要将头或者手等身体的一部分探进贴片机或者矩阵盘送料器内,
否则可能会受到伤害。
另外还要对贴片机或者矩阵盘送料器周围的人员是否有受伤的危险等情况进行确认。
注意
在实施 DO 操作时,请不要在贴片机或者矩阵盘送料器内放置障碍物,
否则可能会使贴片机或者矩阵盘送料器受到损坏。
【菜单】 手动>DI/DO 信号>Signal Input(Control)
■ 数字输出(一览)……未使用
■ 数字输出(详细)……未使用
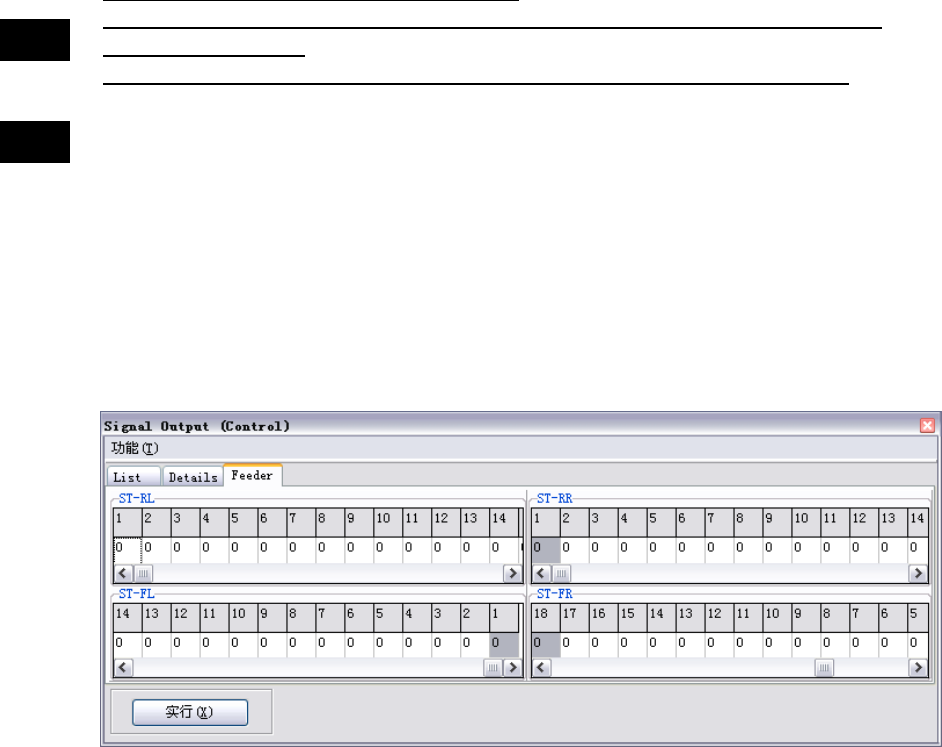
■ 送料器
可以对在前/后送料器固定架中装载的元件送料器进行操作。
【操作】
① 通过左右滚动条,在画面上显示出想要进行操作的送料器序号。
② 点击想要进行操作的送料器的站号“0”,使之变为“1”。
③ 点击<实行>按钮,送料器将进行 1 次元件的搬送动作。
10.元件短缺和出错对应方法
10-16
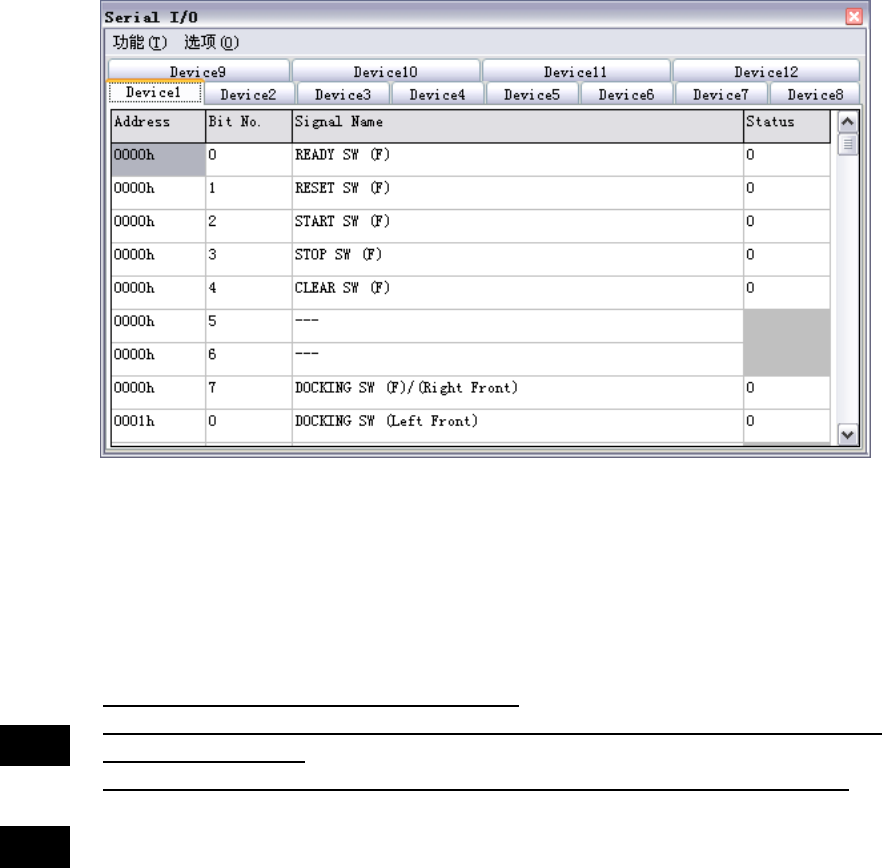
串行 I/O
■ 串行 I/O 分配表
串行 DO (Device 1、3、5、7、9、11、13、15)
串行 DI (Device 2、4、6、8、10、12、14、16)
【操作】
① 将光标置于想要操作的机构操作状态栏的单元格上,然后点击。
② 显示将会从 1(ON)变为 0(OFF)或者从 0(OFF)变为 1(ON),与此同时,机构操作将会
实际动作。
【例】
● 当使基板定位销上/下动作时
① 选择“手动>DI/DO 信号”,将显示出[串行 IO]的窗口。
② 选择[Device1]选项卡。
③ 如果点击“基板定位销”的状态栏,显示将从“0”变为“1”,基板定位销将会上升。
此时请对[Device2]选项卡中“基板定位销上”的状态栏也从“0”变为“1”加以确认。
④ 如果想要使基板定位销下降时,可再一次点击[Device1]选项卡中“基板定位销”的状态
栏。显示将从“1”返回到“0”,基板定位销就会下降。
同时,[Device2]选项卡中“基板定位销上”的状态栏也会从“1”返回到“0”。
警告
如果实施 DO 操作,指定的机构操作就会运行。
在实施 DO 操作时,请不要将头或者手等身体的一部分探进贴片机或者矩阵盘送料器内,
否则可能会受到伤害。
另外还要对贴片机或者矩阵盘送料器周围的人员是否有受伤的危险等情况进行确认。
注意
在实施 DO 操作时,请不要在贴片机或者矩阵盘送料器内放置障碍物,
否则可能会使贴片机或者矩阵盘送料器受到损坏。
DI/DO 示意表
有关 DI/DO 示意表(DI/DO 一览表),请参照 M10/M20 服务手册的“第 4 章_电气部”>DO 示意
表/DI 示意表。