天龙M10 M20_中文手册.pdf - 第334页
10.元件短缺和出错对应方法 10-18 ● 基板夹具的项目 基板定位销 ON 第2挡 块U P 快速夹具 UP 上推板 ● 贴装头的真空被破坏项目 贴装头 1 真空被破坏 贴装头 2 真空被破坏 贴装头 3 真空被破坏 贴装头 4 真空被破坏 贴装头 5 真空被破坏 贴装头 6 真空被破坏 ● ANC 的项目 打开 ANC1
10.元件短缺和出错对应方法
10-17
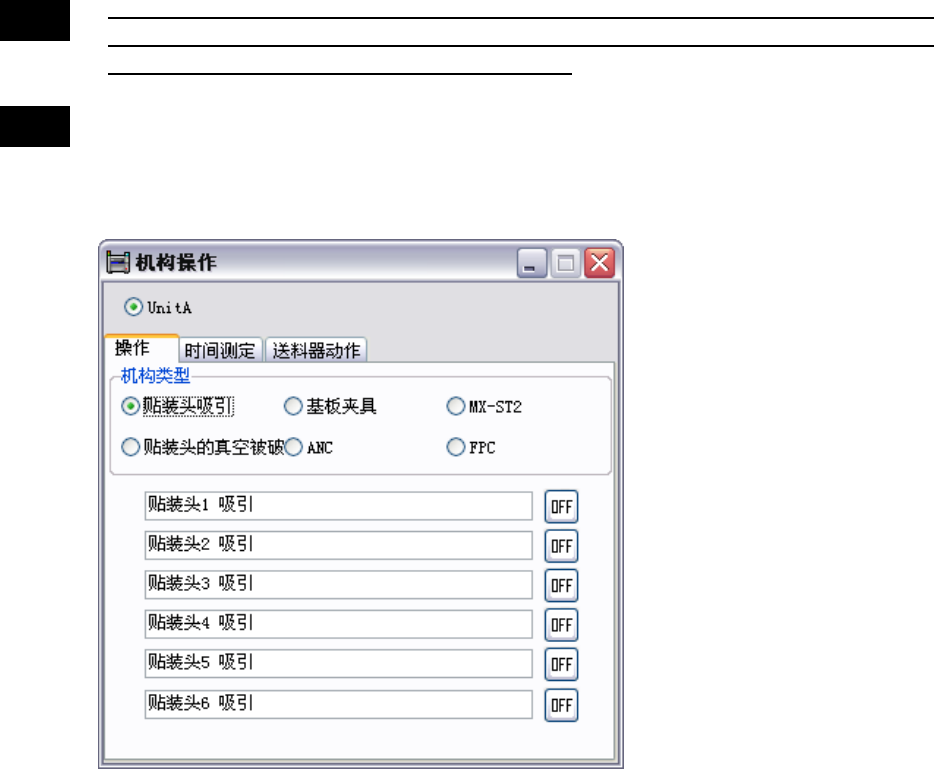
机构操作
“机构操作” 就是指装置的动作。在本系统中表示气动设备和元件送料器的操作。通过这个菜单,
可以对机构操作是否正常运行进行个别检查,也可以对机构操作的动作时间进行测定。
警告
如果实施机构操作,指定的机构操作就会运行。在机构操作运行时,请不要将头或者手等身体
的一部分探进贴片机或者矩阵盘送料器内,可能会受到伤害。另外还要对贴片机或者矩阵盘送
料器周围的人员是否有受伤的危险等情况进行确认。
注意
在实施机构操作时,请不要在贴片机或者矩阵盘送料器内放置障碍物,否则可能会使贴片机或
者矩阵盘送料器的轨道受到损坏。
【菜单】 手动>机构操作
■ 操作
【操作】
① 在机构类型中选择其中的 1 项。
② 点击<OFF>按钮,机构操作开始运行,处于 ON 状态,这时按钮变为<ON>。
③ 点击<ON>按钮,机构操作返回到 OFF 状态,按钮也变为<OFF>。
【项目】
● 贴装头吸取的项目
贴装头 1 吸取
贴装头 2 吸取
贴装头 3 吸取
贴装头 4 吸取
贴装头 5 吸取
贴装头 6 吸取
注意:根据机种的不同,
贴装头数也有所不同。
10.元件短缺和出错对应方法
10-18
● 基板夹具的项目
基板定位销 ON
第2挡块UP
快速夹具 UP
上推板
● 贴装头的真空被破坏项目
贴装头 1 真空被破坏
贴装头 2 真空被破坏
贴装头 3 真空被破坏
贴装头 4 真空被破坏
贴装头 5 真空被破坏
贴装头 6 真空被破坏
● ANC 的项目
打开 ANC1

10.元件短缺和出错对应方法
10-19
■ 时间测定
对机构操作 ON/OFF 的时间进行测定。
【操作】
① 点击<测定开始>按钮,带有复选标记的机构操作从上部开始按顺序进行时间测定,然后显示
出测定结果。
② 点击<测定结束>按钮,测定终了。
【项目】
ON(1) 显示从 ON 命令开始到 OFF 传感器关闭为止的动作时间。
ON(2) 显示从 OFF 传感器关闭到 ON 传感器打开为止的动作时间。
Total 显示 ON(1)和 ON(2)的合计时间。
OFF(1) 显示从 OFF 命令开始到 ON 传感器关闭为止的动作时间。
OFF(2) 显示从 ON 传感器关闭到 OFF 传感器打开为止的动作时间。
Total 显示 OFF(1)和 OFF(2)的合计时间。
Max/Min 对从测定开始到测定结束为止的时间进行测定,并显示最大值和最小值。
【注释】 直到点击<测定结束>按钮为止,测定将反复进行。
■ 送料器动作
进行指定送料器的元件搬送。
【操作】
① 在[送料器固定架]栏中,选择”前”或者“后”。
② 在自旋编辑框中指定送料器的站号。
③ 点击<执行>按钮,指定的送料器将开始动作,实施 1 次元件的搬送。