天龙M10 M20_中文手册.pdf - 第443页
14.智能型送料器功能 14-27 ■ 吸取偏差的设定 即使在某个元件的吸取数据内设定有吸取坐标偏差值,在通过可再定位 功能将该元件(送料器) 配置到其他场所时,偏差值也会被清除(如果与吸取数据的设定位于同 样的场所中,偏差值才为 有效)。因此,如果将元件(送料器)设置到与吸取数据不同的场所中 ,需要注意吸取坐标的偏 移问题。 →在将元件(送料器)设置在与吸取数据不同场所的情况下,如果需要 对吸取坐标偏差值进行设 定时,请按照以下步骤进…
14.智能型送料器功能
14-26
可再定位功能的补充说明
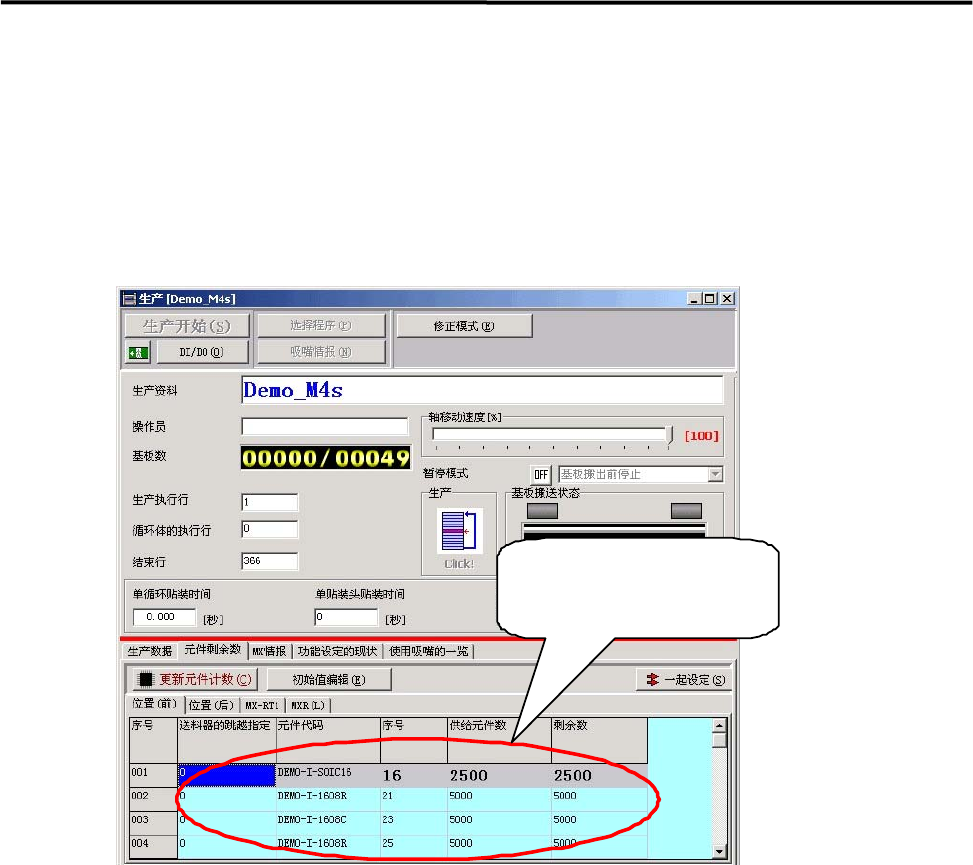
■ 生产画面元件剩余数的显示
在使用可再定位功能时,吸取点会根据送料器的配置而发生变化。因此,当程序数据与实际的送
料器(元件)配置出现差异的情况下,生产画面的剩余数等数据将不再联动。元件的剩余数管理
将通过 ID 数据库来进行实施。
实际上还存在与配置的送料
器不相联动的情况。
■ 管理数据
在使用可再定位功能时,吸取点会根据送料器的配置而发生变化,但是管理数据却不考虑元件(送
料器配置)的变化,还在累积计算。因此,当程序数据与实际的送料器(元件)配置出现差异的
情况下,管理数据的内容将与实际情况有所不同。
■ 事先确认
在生产开始时,对实际配置的元件是否能够被吸取,并没有进行事先确认。例如,当配置的元件
处于贴装头的可动范围之外时,贴装头将无法吸取元件,会发生「送料器 NG:到达再贴装极限」
的错误。(但是,针对数据库,并没有按照「送料器 NG:到达再贴装极限」处理,如果在吸取可
能的场所进行重新设置,将会开始吸取作业。)
■ 跳跃指定方法
按照个别单位无法进行吸取点的跳跃指定。在需要跳跃任意的元件时,请按照贴装数据,对行单
位的跳跃进行指定。

14.智能型送料器功能
14-27
■ 吸取偏差的设定
即使在某个元件的吸取数据内设定有吸取坐标偏差值,在通过可再定位功能将该元件(送料器)
配置到其他场所时,偏差值也会被清除(如果与吸取数据的设定位于同样的场所中,偏差值才为
有效)。因此,如果将元件(送料器)设置到与吸取数据不同的场所中,需要注意吸取坐标的偏
移问题。
→在将元件(送料器)设置在与吸取数据不同场所的情况下,如果需要对吸取坐标偏差值进行设
定时,请按照以下步骤进行实施。
①暂停生产,进入修正模式。
②打开数据编辑>「吸取数据」编辑画面。
③设置在不同于原来吸取数据设定场所中的元件,将会被追加在吸取数据中,
请对吸取点序号进行确认之后,再设定吸取坐标偏差值。
④通过“数据保存>数据更新>修正模式解除>再生产”等步骤,就可以实施能够反映偏差值
的吸取作业。
【注释】 在使用可再定位功能的生产暂停修正模式中,只有生产实行中的程序数据才能够被编辑。另外,
虽然在生产中将反映出变更(更新)的内容并继续生产,但是如果取消生产时,变更(更新)的
内容也会被同时取消,不反映到原来的程序数据中。
■ 侧面吸取功能及角度指定吸嘴使用的限制
针对被设定为侧面吸取的元件,请不要将其设置在程序数据(吸取数据)设定位置以外的位置上。
另外,角度指定吸嘴(角度方向性的设定为「无限制」以外的吸嘴)上的吸取元件也要同样设置。
14.智能型送料器功能
14-28
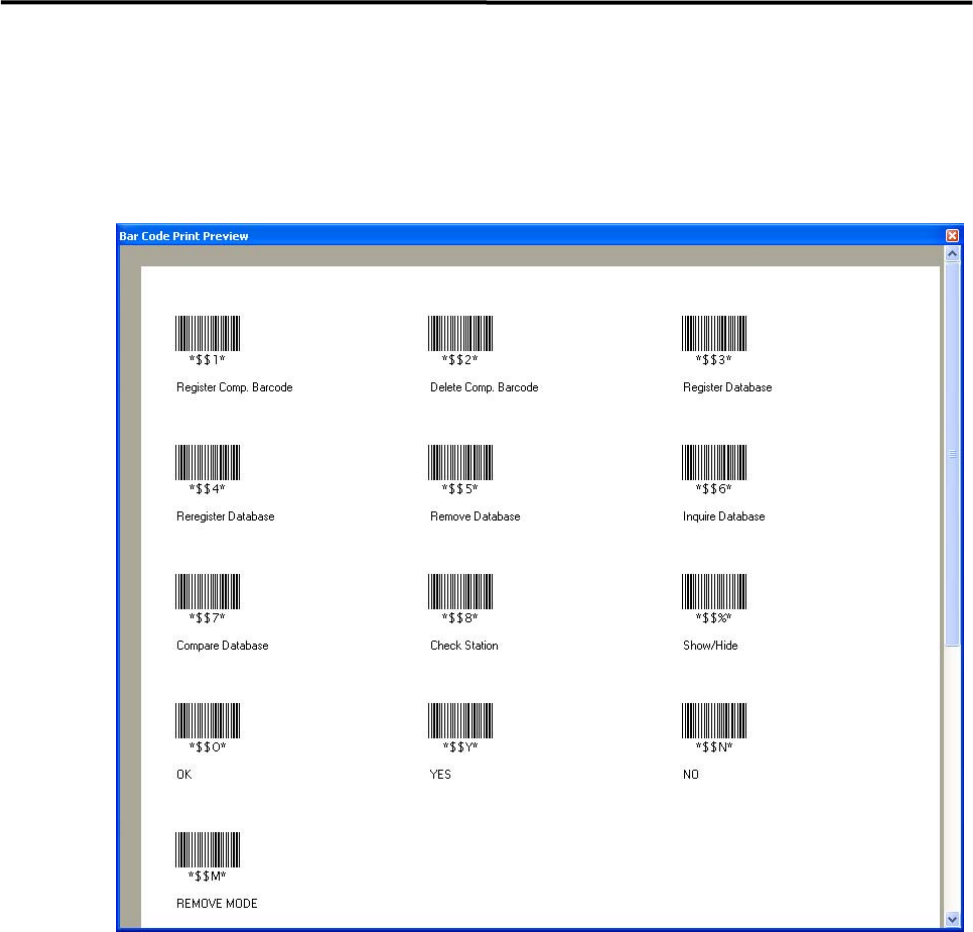
指令条形码
这是运用智能型送料器功能所必要的指令条形码。通过起动条形码印刷程序
「BarCodePrint.exe」,选择文件「command.prb」,就可以进行印刷可能。
详细情况请参照「服务器软件的运用」一节。