天龙M10 M20_中文手册.pdf - 第258页
5.资料库的制作与编辑 5-94 元件上面高度 输入从矩阵盘下面到元件上面的高度。 ★单位:0.01mm 供给角度 输入与基准不同的角度 (从贴片机的前侧观看) 。 只能对 90/180/~90/0 度进行指定。从上面观看,逆时针方向为正方向。 在相同的元件,供给状态不同的、制作 2 种元件链接的情况下,需要使 用供给角度。 A B 在上述 2 种元件链接状态下进行贴装时,如以 A 状态的元件作为基准进 行图像资料的登录。虽然 A 元件…
5.资料库的制作与编辑
5-93
【注释】 在使用 JEDEC 用送料盘的情况下,前侧和后侧定位销的偏差值为 X=0/Y=170。请进行正确的检
测。
不是同一矩阵盘不能进行链接。
【注释】 MX-ST2 和 MX-20 只是在构造上有所不同,基准点的设定方法都相同。在使用 JEDEC 用送料盘的
情况下,前侧和后侧定位销的偏差值为 X=0/Y=180。请进行正确的检测。
【注释】 MX-RT1 和 MX-20 只是在构造上有所不同,基准点的设定方法都相同。在使用 JEDEC 用送料盘的
情况下,前侧矩阵盘和后侧矩阵盘的偏差值约为 Y=140。请进行正确的检测。
矩阵盘资料库(矩阵盘数据)
【菜单】 程序数据>矩阵盘数据
程序数据>吸取数据>供给部/矩阵盘>矩阵盘数据
在使用矩阵盘送料器时,对矩阵盘情报进行登录。在矩阵盘资料库制作之前,必须先制作送料盘
资料库。
【项目】
文件>保存 在资料变更后进行选择,并将变更的内容进行保存。
矩阵盘 对矩阵盘名称进行指定。它与“程序编辑>吸取资料”相链接。
★最大登录数:500 件;最大文字数:半角 14 文字
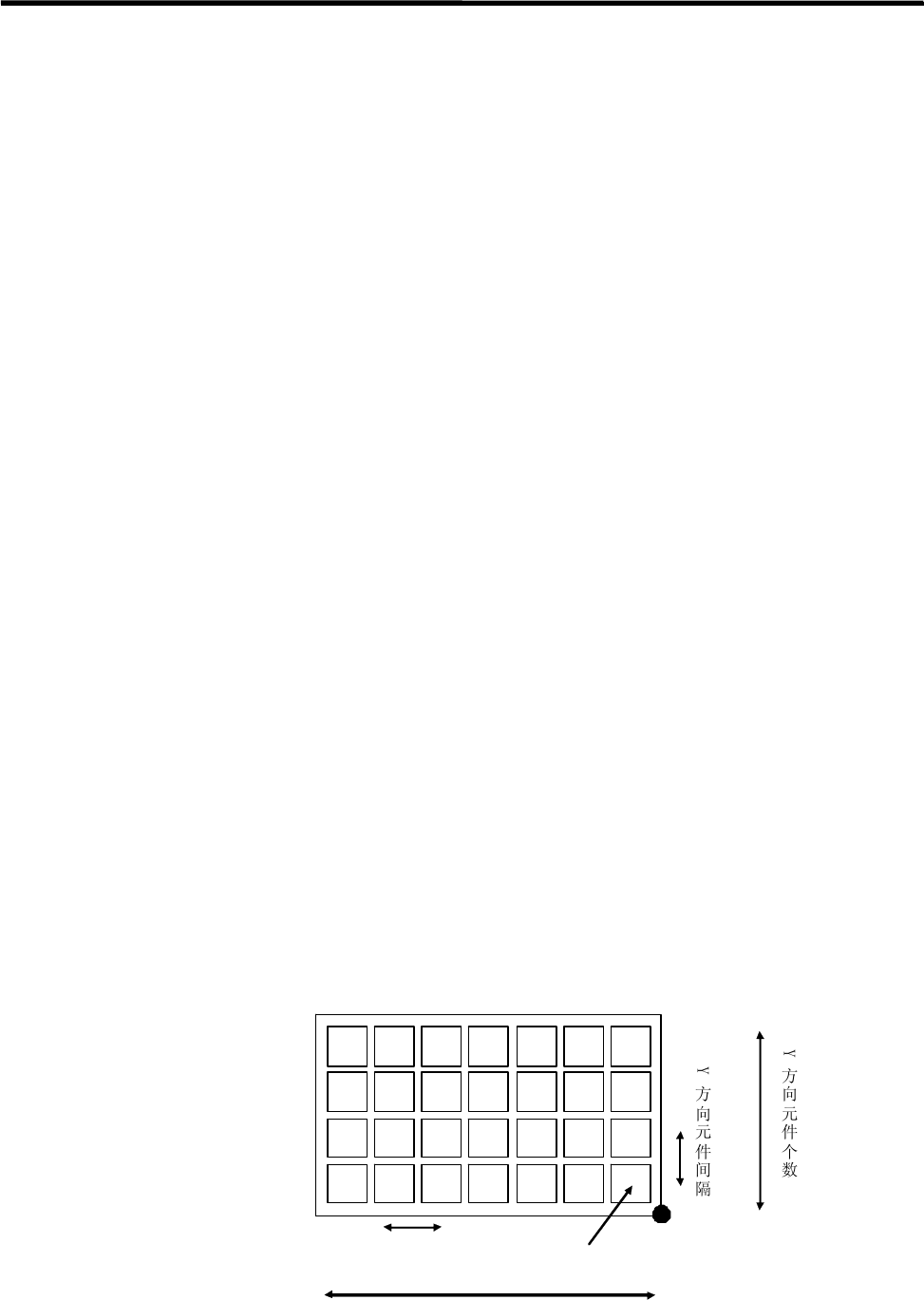
X 方向元件间隔 矩阵盘上元件与元件的间隔(X 方向)
★单位:0.01mm
X 方向元件个数 矩阵盘上元件的个数(X 方向)
★最大个数:999 个
Y 方向元件间隔 矩阵盘上元件与元件的间隔(Y 方向)
★单位:0.01mm
Y 方向元件个数 矩阵盘上元件的个数(Y 方向)
★最大个数:999 个
第 1 吸取点 X 坐标 对最初进行元件吸取的 X 坐标进行指定。
★单位:0.01mm
第 1 吸取点 Y 坐标 对最初进行元件吸取的 Y 坐标进行指定。
★单位:0.01mm
第1吸取点
X 方向元件个数
X 方向元件间隔
原点
5.资料库的制作与编辑
5-94
元件上面高度 输入从矩阵盘下面到元件上面的高度。
★单位:0.01mm
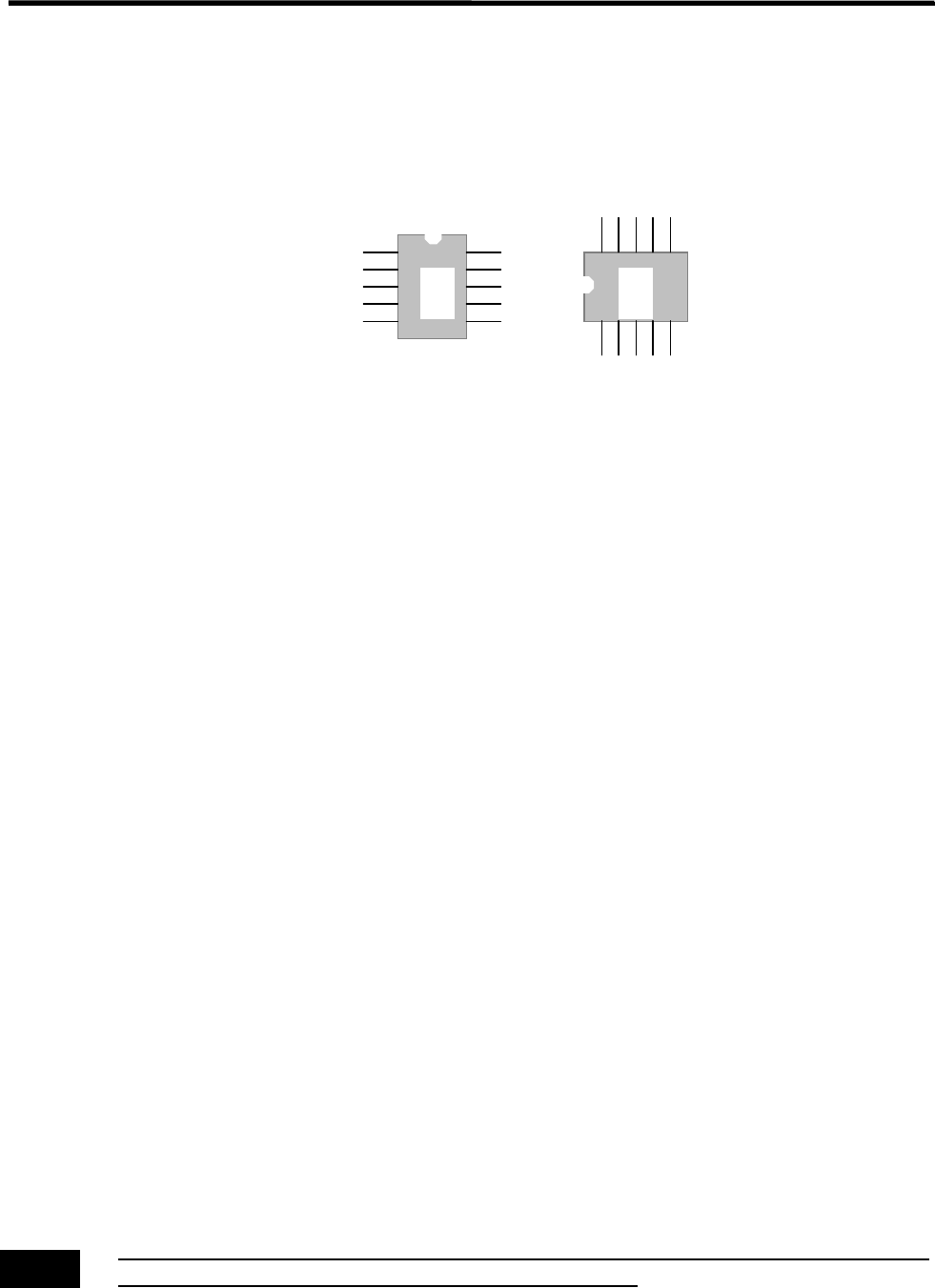
供给角度 输入与基准不同的角度(从贴片机的前侧观看)。只能对 90/180/~90/0
度进行指定。从上面观看,逆时针方向为正方向。
在相同的元件,供给状态不同的、制作 2 种元件链接的情况下,需要使
用供给角度。
A
B
在上述 2 种元件链接状态下进行贴装时,如以 A 状态的元件作为基准进
行图像资料的登录。虽然 A 元件矩阵盘资料库的供给角度为 0
° ,但是 B
元件为 90
° ,在“程序编辑>吸取资料”中,与 B 相同的元件代码将向 A
元件进行分配,并链接起来。这样如果制作了吸取资料,A 元件和 B 元
件的贴装角度就没有必要改变。元件的贴装角度为供给角度的关联值。
错误的元件缺省 未使用。
后补再贴装的标号 (后补再贴装)无效
(后补再贴装)有效
通过这一功能进行的后补再贴装不是指在那一时刻,而是在程序的最后
集中进行。但后补再贴装中的再贴装与通常的再贴装是相同的。
为了能够使用这一功能,需要在“用户参数>功能设定(1)>后补再贴装
(只对应矩阵盘元件)”中将后补再贴装变为有效。
■ 矩阵盘资料库的输入方法(1)
在送料盘前部靠边安装矩阵盘定位时
用手动输入 X 方向的元件个数和 Y 方向的元件个数。
其他输入可以通过选择“功能>检测”,使用检测窗口中的[检测矩阵盘]进行输入。
【操作】
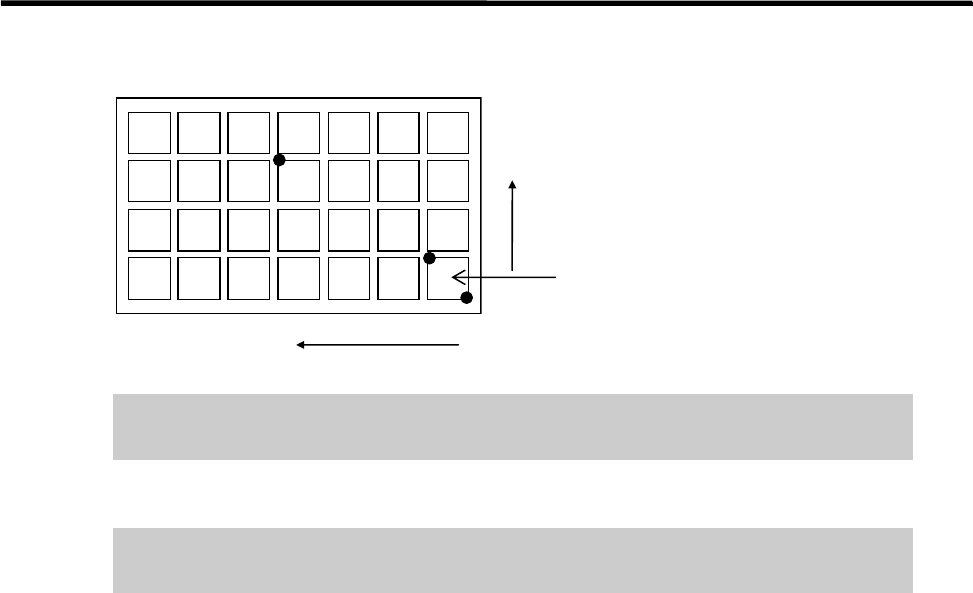
事先将 X 方向元件个数和 Y 方向元件个数进行输入。此个数就是从第 1 吸取点吸取的元件到第 3
检测点装入元件的个数。在以下的例子(参照下页)中,X=4;Y=3。
⑴ 参照「7.矩阵盘送料器的操作」一章,对矩阵盘和送料盘进行正确的安装。
⑵ 将光标置于矩阵盘资料库的输入对象行,选择“功能>检测”,打开检测窗口。
⑶ 点击[检测矩阵盘]选项卡。在[设备类型]栏中选择适当的矩阵盘送料器。在[送料盘位置]
栏选择前/后中适当的一项。在 MXR 的情况下选择“前”,在 MX-RT1 的情况下选择“前”或
者“后”(前/后都可以选择)。
下面的操作④和⑤只适用于 MX-20 和 MXR。在滑动矩阵盘的情况下,请通过手动操作对前/后
进行正确设定。
⑷ 设定[送料盘序号]
⑸ 点击[动作模式]中的<搬出>按钮,如果点击<送料盘移动>按钮,所指定的送料盘就会进入到
贴片机内。
在执行矩阵盘检测时,请不要将头或者手等身体的一部分探进贴片机内,可能会受到伤害。另外
还要对贴片机周围的人员是否有受伤的危险等情况进行确认。
警告
5.资料库的制作与编辑
5-95
⑹ 下面将对以下的 3 点进行检测。
这时基板相机不能对矩阵盘全体进行检测,也没有必要进行全体检测。在基板相机可以移
动的范围内,对从第一吸取点到最远的第 3 点进行检测。第 3 检测点必须与事先输入的 XY
的元件个数相对应。
这样,第 1 吸取点的坐标和元件的间隔就会被计算出来,加以输入。
在检测输入后请将实际的 X 或者 Y 方向的元件个数进行修正输入。贴片机将会通过(X 方向
的元件个数)X(Y 方向的元件个数),对送料盘的元件个数进行计算,发出诸如元件短缺等
的错误信息。
⑺ 然后进行[矩阵盘资料库]中[元件上面高度]的检测输入。由于这是 Z 轴检测,需要先把吸
嘴安装到贴装头上。(推荐使用不带有胶片的 No.5~6 号的吸嘴)
⑻ 在[轴的指定]栏中指定“XY”轴,在[贴装头的指定]栏中指定安装有吸嘴的贴装头序号,
在[X 列]栏中输入“1”,在[Y 行]栏中输入“1”,然后点击<矩阵盘取点>按钮,该贴装
头就会移动到第一吸取点。
⑼ 将复印纸大小的 1 张纸置放在检测元件之上。在[轴的指定]中选择[Z 轴],通过[轴速度]
的设定使吸嘴缓慢下降。停止的位置通过拉动夹在吸嘴和元件之间的纸张进行定位,刚好夹紧
的位置为理想位置。
⑽ 从[检测]中读取这时的 Z 的坐标值,用键盘将从 Z 值中减去 0.1mm 所得的值(吸嘴接触元件
只需要下压 0.1mm 的距离),在[元件上面高度]中进行输入。
⑾ 点击<关闭>按钮,将[检测]窗口关闭。
⑿ 选择“文件>保存”,进行数据的保存。
【注释】 上述[元件上面高度]的检测输入,可能会有与吸嘴冲突的危险。因此,建议使用游标卡尺等仪
器对矩阵盘的高度进行实际测量,然后再进行按键输入。
● 根据真空压力自动检测[元件上面高度]
除了上述将吸嘴下降到元件上面进行检测的方法之外,还有将吸嘴接触到元件上面,利用真空压
力的上升,自动进行检测的方法。
【操作】
①
将 No.5 号吸嘴安装到[贴装头的指定]栏中指定的贴装头上。
【注释】 请务必使用不带胶片的 No.5 号吸嘴。
②
在[轴的指定]栏中指定“XY 轴”,在[贴装头的指定]栏中指定安装有吸嘴的贴装头序号,
在[X 列]栏中输入“1”,在[Y 行]栏中输入“1”,然后点击<矩阵盘取点>按钮,该贴装
头就会移动到第一吸取点。
③
在[轴的指定]中指定“Z 轴”,在[贴装头的指定]中指定安装有吸嘴的贴装头序号。然后
通过目视,将吸嘴缓慢地下降到元件上面,直到还有几毫米为止。
【注释】 此时,只是将吸嘴靠近元件上面即可。没有必要将吸嘴接触到元件上面。当然也需注意不要让吸
嘴顶入到元件上面。
X=4
Y=3
3 点检测的位置将在检测窗
口中被图形显示出来。
第一吸取点